
基于无人机倾斜摄影的三维数字露头表征技术
2018-02-27 10:19印森林陈恭洋刘兆良冯伟刘岩
沉积学报 2018年1期
印森林,陈恭洋,刘兆良,冯伟,刘岩
长江大学录井技术与工程研究院,湖北荆州 434023
0 引言
储层分布模式及预测方法是储层地质学研究的核心。随着油田勘探开发的目标不断精细化,砂体平面精度要求越来越高,纵向单元研究尺度越来越小[1]。因此,近年来发展了三维地震数据体切片技术[2]、密井网储层构型层次分析法[3- 7]、水槽沉积模拟实验[8]、Google地图与实地(现代沉积和野外露头)考察相结合的研究手段等[9- 10]。Posamentier等率先开始了地貌特征与垂向演化的“地震地貌学”研究[11- 12];随后,大量学者关注了地震资料的沉积类型和岩性解释[2,13]。在地震分辨率难于满足解释精度需要时,储层构型的研究主要依据密井网资料,利用层次分析法,结合沉积相模式分级次开展储层构型预测。然而,在目标区沉积相认识有误或构型模式不清楚的情况下,井间难于预测。为了进一步弄清地质体沉积过程,水槽沉积实验模拟地质体沉积过程得到了发展应用。随着大数据信息技术发展,学者利用Google地图与实地考察相结合的研究手段进行类比研究。由于Google地图达不到精细砂体构型的研究精度(分辨率5~10 m),人工野外考察又有局限性,例如,定量化难度大、工作效率低等。基于此,本文引入了基于无人机倾斜摄影的三维数字露头表征技术。无人驾驶飞机简称“无人机”,英文缩写为“UAV”(Unmanned Aerial Vehicle),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。目前,无人机技术在农林[14]、军事[15]、城市规划[16]及其他行业[17- 18]取得了较好的发展,探讨把无人机引入到野外地质工作中来,利用无人机的迅速、高精度及定量化特点开展野外露头考察辅助研究工作,不仅对拓展沉积学研究方法具有重要意义,同时对提高野外露头考察效率和资料利用率具有重要的实践意义。
1 传统野外考察的局限性
野外地质考察作为基础、重要、直观的地质学研究手段,传统主要靠人工逐点考察,此方法具有明显的局限性。主要包括以下几点:
(1) 资料获取程度低
传统地质考察的技术手段主要是照相、丈量、取样和描述等,很多部位无法采集数据,例如:浅积水区、高陡露头区、超大(长)沉积体系等。
(2) 获取资料的工作效率低
传统地质考察主要依赖于人工逐点工作,采用断续工作的方式,重点剖面重点分析,这样工作效率低下,每日考察量十分局限。有时,对于有些距离生活区较远、气候恶劣的考察点,白昼考察量更加局限,甚至刚到考察点就需尽快返回。
(3) 已获取资料精度差异大、系统性连续性差、处理难度大
传统地质考察在典型考察点资料相对充分,表现出局部精度高,而整体精度低、资料连续性和系统性差的特点。另一方面,离开露头区后,在后续研究过程中,照片资料拼接处理难度较大。
(4) 资料定量化难度大
传统地质考察坐标信息主要用GPS定位仪确定,点→点之间坐标信息统一性差。而对于高、陡、窄剖面的测量主要依靠简易比例尺估算,显然此方法误差较大。
(5) 资料利用率低
传统野外考察获取资料后,后续研究主要应用照片描述、简易比例尺测量估算等数据,目前数据挖掘不够,定量化储层地质知识库存在明显不足。
(6) 传统人工逐点考察具有潜在危险性
传统人工逐点野外考察常常需要人为攀爬悬崖峭壁、涉足未知积水区等潜在危险区域,人身安全受到很大威胁。
(7) 上述系列问题引起了解释结论与地质真相相去甚远
基于传统野外考察的技术特点导致解释结论与地质真相差异较大。
2 无人机倾斜摄影的特点
2.1 无人机装置特点
无人机在很多领域取得了良好的应用效果,例如,军事目标侦查与携载武器打击目标、农业应用无人机喷洒农药与数字智慧城市建设等方面。目前,无人机主要有固定翼和多旋翼两种类型。其中,固定翼飞机靠螺旋桨或者涡轮发动机产生的推力作为飞机向前飞行的动力,主要的升力来自机翼与空气的相对运动。固定翼无人机主要应用在在大航程,高度较高时,比如电力巡线,公路的监控等等。而多旋翼是依靠多个旋翼产生的升力来平衡飞行器的重力,让飞行器可以飞起来,通过改变每个旋翼的转速来控制飞行器的平稳和姿态。所以多旋翼飞行器可以悬停,在一定速度范围内以任意的速度飞行,基本上就是一个空中飞行的平台,可以在平台上搭载传感器、相机和机械手之类的仪器。总体来说,固定翼无人机操作相对较难,而多旋翼相对操作简单。
本文采用的是常规八旋翼无人机,型号TTA-M8FA(图1A),飞机由八个可以高速旋转的桨叶组成,无人机的主要参数如下:无人机及配套装置的重量约9 kg,尺寸1.81 m×1.81 m×1.65 m,最大载荷5 kg,控制半径2 000 m,飞行速度0~12 m/s,抗风能力6级,空中飞行时间约30分钟。八旋翼无人机以高速的飞行方式可以在复杂区域进行野外地质露头资料的采集。
2.2 倾斜摄影技术
传统的无人机摄影测量通常是对测区进行正直摄影,并保证航行带间区域重叠达到15%~30%,航带内相邻像片之间有60%的重叠,以实现立体测图。而当物体完全竖直时,正直摄影对表征三维形态、规模存在较大难度,甚至无法摄影垂直角度的物体。因此,为了更好的表征地表三维形态及特征,学者们提出了倾斜摄影的方法[19]。倾斜摄影技术克服了传统航摄从垂直角度拍摄的局限,通过在同一飞行平台上搭载多台传感器,同时从1个垂直角度和4个倾斜角度(倾斜45°,分别位于北东、北西、南东、南西四个方向)采集纹理影像,同时内置的控制器支持多种拍照触发模式(脉冲PWM触发、定时触发、快门信号触发),相机像素1亿,精度根据需要可以持续增加,可持续变焦距,定点曝光和定时曝光(图1B)(表1),更加真实地反映地表物体的实际情况,弥补正射影像的不足。2010年4月9日,我国测绘行业首次引进倾斜摄影技术。近年来,倾斜摄影技术在测绘、国土安全、城市管理等领域应用日益广泛[16,19- 21]。
倾斜摄影技术主要优点有以下几个方面:1)资料获取程度高,可以从5个视角全面的扫描地表露头;2)获取资料的工作效率高(飞机巡航速度快(60 km/h));3)资料精度高、系统性强,整体连续性差异性小,分辨率统一;4)照片拼接处理则相对简单;5)图像数据定量化、测量准确,有三维坐标信息、高陡窄剖面测量误差小;6)资料可利用率高,三维数据体的坐标和图像信息利用率高;7)对比人工逐点考察危险性大大降低;解释结论合理性增强。
3 研究区实例分析
3.1 露头区概况
野外露头地理位置位于山西省吕梁市坪头镇,坪头乡剖面地层发育了奥陶系上统马家沟组(O3m)、石炭系中统本溪组(C2b)、二叠系下统太原组(P1t)、山西组(P1s)、二叠系上统上石盒子组(P2sh)(图2);剖面各个层位地层发育齐全且出露条件较好,岩性类型丰富。人工考察野外线路约15 km,考察重点点位从185~230,共计46点,考察时间约为10小时。与此同时,无人机并行飞行工作,三维数据初始模型全部收集完毕耗时约为1小时。

图1 无人飞机和倾斜摄影相机A.八翼无人机;B.五个镜头的倾斜摄影相机Fig.1 Unmanned Aerial Vehicle (UAV) and Oblique camera

相机参数工作环境外观尺寸相机数量有效像素总像素传感器尺寸像元尺寸图像分辩率倾斜角度存储容量曝光方式镜头焦距工作温度工作湿度尺寸重量5个4240万2亿1千万35.9mm×24.0mm4.525μm7952×530445°320G飞控触发曝光35mm-10℃~60℃95%260mm×220mm×177mm3200g
3.2 无人机采集三维露头模型
3.2.1 无人机野外工作流程
无人机野外采集的具体流程包括八个步骤:1)野外露头的探勘与无人机装置组装,对野外露头的典型点位进行人工探勘并用多个红旗标识GPS定点来标明典型点位,组装无人机,做好飞行前的各项准备工作;2)飞机巡航路线规划,通过无人机飞行配套软件的GPS定位功能,对无人机即将要飞行的区域进行路线规划,选择最优路线完成工作任务;3)飞机互动测试,在飞行前对飞行控制器进行响应测试,防止飞机空中失控;4)飞行坐标信息及倾斜摄影成像,无人机按照预定路线自动巡航,并实时的完成坐标及摄影成像扫描;5)空地信息互传,无人机把空中数据实时传输到地面接受器,实现信息及时空地互传;6)二维及三维数据体测量,对获取数据进行简单测试,测试是否满足采集需求,不满足需求则需要重新规划采集;7)点云数据处理,对采集数据进行二次处理,获取坐标与图像的高精度数据;8)三维数字露头模型,利用专有软件处理得到三维空间的数字露头模型(图3A)。

图2 野外露头区位置图A.野外露头路线及点位;B.野外露头分布区域特点Fig.2 Location of outcrop area
在研究流程方面相对于传统地质考察研究,无人机获取资料具有定量化程度高、系统性强的特点可以更加精准建立研究区的储层地质知识库。无人机野外露头解释的具体流程包括以下几个步骤:1)露头的描述、测量及采样等基础工作;2)典型露头剖面解剖,主要包括岩石相、构型单元及叠置样式研究;3)多露头剖面对比,在典型的区块进行对比研究;4)沉积构型模式研究,利用上述研究成果开展构型模式研究;5)建立储层地质知识库,在沉积构型模式的研究基础上,开展地质知识库的研究(图3B)。
3.2.2 无人机三维数字露头模型采集
利用无人机倾斜摄影技术对研究区进行了数据采集,数据模型主要由点云数据及图像数据组成。采集的数据模型具有其他野外采集方法(例如三维激光扫描仪器)不具备的优势,即三维坐标(经度、纬度、海拔)信息,这种坐标信息与图像信息具有很好匹配性,为三维地质建模奠定了良好的基础。
飞机按照预定规划的路线对露头区进行巡航扫描,飞机从飞行起点出发,按照设定曝光方式边飞边迅速拍照,记录坐标的同时记录了图像信息,信息被地面接收器接收,形成地空互动传输扫描的工作流程。飞机在开始往返扫描过程中,平面顺次飞行连续抵达飞行终点(图4A),最后被地面接收器接收安全返回地面,完成研究区露头扫描。扫描模型具三维坐标信息(经度、纬度、海拔)(图4A),可以准确定量描述任意位置坐标。同时,模型中的地质体的规模特征也较好的得到了表达,例如砂体宽度信息(图4B)、砂体厚度信息(图4C)。建立的三维露头模型库任意视角查看放大显示局部信息(常规分辨率约在3~5 cm,随着相机像素增加与飞行高度的设置可以进一步增加分辨率)。另一方面,三维模型可以分析查看人工考察不到的野外露头剖面(图4),大大的改进了工作效率,提高了定量化程度。

图3 无人机野外露头采集、处理及解释流程A.数据采集、处理流程;B.野外露头解释流程Fig.3 Collection, processing and interpretation flowchart of outcrops with unmanned aerial vehicle
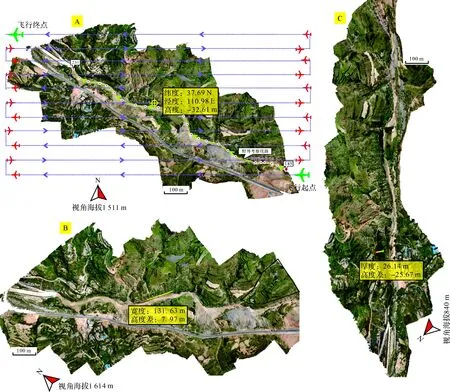
图4 无人机倾斜摄影三维露头模型A.正北俯视图、坐标信息与飞行路线;B.北西向俯视图与宽度值;C.北西向平视图与厚度值Fig.4 3D digital outcrop model processed by UAV oblique photography
3.3 三维数字露头表征
3.3.1 模型网格化
野外露头初始模型可以利用采集的点云和图像信息进行网格化,形成三维网格化数据模型。由于地质研究具有明显的层次结构性,而这种结构性需从三维空间的角度去描述与表征,因此模型的网格化对认知采集的野外露头模型十分重要,通过网格化的地质体大大方便了三维空间的建模工作,为下一步三维数字露头的表征奠定良好的基础。采集的数据模型主要是点云和图像,点云数据是携带具有扫描资料以点的形式记录,每一个点包含有三维坐标,有些可能含有颜色信息(RGB)或反射强度信息(Intensity)。颜色信息通常是通过相机获取彩色影像,然后将对应位置的像素的颜色信息(RGB)赋予点云中对应的点。强度信息的获取是激光扫描仪接收装置采集到的回波强度,此强度信息与目标的表面材质、粗糙度、入射角方向,以及仪器的发射能量,激光波长有关。在采集的三维数据模型中,工区携带有坐标信息的点云数据根据地形复杂程度形成密集数据点(图5A),这种点云数据耦合该点倾斜摄影照片数据(瓦片区块成像)(图5B)。利用Context Capture软件,对点云数据经过处理后形成野外露头三维网格化模型(图5C,D,E)。
3.3.2 模型数字化表征
无人机倾斜摄影采集三维数字模型,更多的是为数字地质露头服务,最终是为了更好的服务于地质。地质认识的形成需要越来越精确、定量化的表征与描述,需要不断的丰富地质知识库的内涵,包括地层界限、岩性及其组合特征、地质体形态、规模、方向和叠置样式等等。研究选择了三个典型露头区,其一位于无人机飞行起点,为奥陶系马家沟组碳酸盐岩灰岩与石炭系中统本溪组碎屑岩形成的不整合界面(图6A)。剖面出露较好,岩性自下而上由碳酸盐岩灰岩、变质岩风化壳、块状砂岩与泥岩构成。剖面储层的叠置样式,主要是下伏的块状宽厚比大的灰岩与碎屑岩砂坝、水道叠置而成(图6B)。灰岩岩性在研究区视域范围内边界不明显,单砂体的厚度大约在2 m,宽度约80~100 m。

图5 网格化露头模型A.点云数据;B.瓦片分区;C,D,E.不同位置网格化模型Fig.5 3D outcrop model gridding

图6 典型露头之一——碳酸盐岩与碎屑岩地层叠置A.无人机飞行剖面;B.岩性体叠置样式Fig.6 No.1 typical outcrops, carbonate rocks and clastic strata superimposed outcrop
典型露头区之二位于无人机飞行中间,为石炭系中统本溪组砂岩与煤层叠置(图7A),剖面出露较好。剖面岩性自下而上由多期次块状砂岩、煤层与泥岩构成,主要由下伏的薄层状宽厚比较大砂坝、水道与煤层叠置而成(图7B)。研究区的砂岩厚度约为0.5 m,煤层厚度约0.3 m,视域范围内砂体的拼接叠置导致延伸很长。
典型露头区之三位于无人机飞行即将结束位置,为石炭系中统本溪组分流水道与砂坝的叠置(图8A)。剖面出露较好,岩性自下而上由多期次块状砂、泥岩构成,主要由下伏的薄层状宽厚比较大砂坝、水道与煤层叠置而成(图8B)。研究区的砂岩厚度约为0.5 m,视域范围内砂体的拼接叠置导致延伸范围很长。

图7 典型露头之二——砂岩与煤层叠置A.无人机飞行剖面;B.岩性体叠置样式Fig.7 No.2 typical outcrops, sandstone and coal superimposed outcrop

图8 典型露头之三——不同规模的砂体叠置A.无人机飞行剖面;B.岩性体叠置样式Fig.8 No.3 typical outcrops, different scale of superimposed sandstone
3.3.3 无人机与人工考察的结合
前已述及无人机的很多优点,例如,快捷、高效和定量化等方面。然而,因无人机无法代替人工现场对露头研究区的地质信息分析,所以无人机也需要与人工考察相结合。从研究区拍照采集的情况来看,人工考察分辨率(毫米级)高过无人机(厘米级),因人工考察受时间限制,不可能无限详尽的拍摄,这样就导致了获取资料系统性差异很大。另一方面,露头地质体本身是三维的,而人工考察主要以不规则的二维剖面为主。因此,需要结合无人机系统性及全面性的特点,尽量避免地质认识的“横看成岭侧成峰,远近高低各不同”的情况。
此外,人工考察对比无人机,在局部特定的沉积构造研究方面具有明显的优点。但是,人工考察在定量化的方面,存在较大缺陷。例如,对视长度较长的剖面(>200 m),相机在保持精度的情况下,无法一次全镜头拍摄。不过,人工考察时为了保证剖面的连续性和系统性,往往需要牺牲精度,一般采用远景拍摄与近景多次多方位拍摄相结合的方法来解决。
4 讨论与结论
无人机搭载SHARE- 200倾斜摄影相机进行飞行扫描的过程中,也存在不足:其一,天气晴朗扫描效果好,如果遇到云、雨、雾的天气,扫描的点云数据会受到影响,清晰度和分辨率降低;其二,野外露头测量精度主要受搭载相机的分辨率控制,可以根据需要的精度搭载相应的倾斜摄影相机,一般来说,常用相机的分辨率约4千万像素(7 952×5 304像素),在飞机200 m飞行时露头分辨率约为5~10 cm。
在目前流行的野外露头技术,如全站仪、三维激光扫描、探地雷达等数字露头技术中,应用比较多的三维激光扫描技术在野外数据采集精度上具有明显优势[22],但是高精度的数据体反而给数据处理和抽稀带来了非常大的难度,另一方面,三维激光扫描的本质还是二维扫描,缺乏三维坐标数据,如果遇到高陡剖面,在测量上依然有误差,离真正的三维数字露头还相去甚远。本文提出的基于无人机倾斜摄影的三维数字露头信息丰富,关键是具有坐标信息,使得真正三维数字露头成为了可能,目前主要是对地表出露的信息进行了研究,下一步需要基于倾斜摄影数据模型进一步开展研究,深化对内部地质体结构的认识。
通过上述研究,得出了如下结论:
(1) 传统地质考察不足主要有以下七个方面:1)资料获取程度低;2)获取资料的工作效率低;3)资料精度不统一、系统性差、处理难度大;4)资料定量化难度大、复杂地质情况准确测量难度大;5)资料利用率低;6)人工逐点考察具有潜在危险性;7)系列问题引起了解释结论与地质真相相去甚远。
(2) 无人机倾斜摄影具有明显的技术优势,对传统人工地质考察具有方法创新性。扫描模型具三维坐标信息(经度、纬度、海拔),可以准确获取任意位置坐标。同时,模型常规分辨率约在3~5 cm,完全满足野外考察的一般需求。另一方面,三维模型可以分析人工没有或考察不到的野外露头剖面,不仅大大的改进了工作效率,而且提高了定量化程度。
(3) 利用露头采集数据实例,对研究区露头进行了岩相构型分析。无人机倾斜摄影不仅使三维地质露头表面数字成像成为现实,而且对砂体内部结构的认识更加定量化与精细化,对于建立训练图像、地质知识库进行三维地质建模具有重要参考价值,是辅助地质学家进行高效野外考察的先进技术。
致谢 感谢审稿专家的宝贵意见!
)
[1] 李阳,吴胜和,侯加根,等. 油气藏开发地质研究进展与展望[J]. 石油勘探与开发,2017,44(4):569- 579. [Li Yang, Wu Shenghe, Hou Jiagen, et al. Progress and prospects of reservoir development geology[J]. Petroleum Exploration and Development, 2017, 44(4): 569- 579.]
[2] Zeng H L, Loucks R G, Frank Brown L Jr. Mapping sediment- dispersal patterns and associated systems tracts in fourth- and fifth- order sequences using seismic sedimentology: example from Corpus Christi Bay, Texas[J]. AAPG Bulletin, 2007, 91(7): 981- 1003.
[3] 于兴河,李胜利,李顺利. 三角洲沉积的结构:成因分类与编图方法[J]. 沉积学报,2013,31(5):782- 797. [Yu Xinghe, Li Shengli, Li Shunli. Texture- genetic classifications and mapping methods for deltaic deposits[J]. Acta Sedimentologica Sinica, 2013, 31(5): 782- 797.]
[4] 朱筱敏,刘媛,方庆,等. 大型坳陷湖盆浅水三角洲形成条件和沉积模式:以松辽盆地三肇凹陷扶余油层为例[J]. 地学前缘,2012,19(1):89- 99. [Zhu Xiaomin, Liu Yuan, Fang Qing, et al. Formation and sedimentary model of shallow delta in large- scale lake: Example from Cretaceous Quantou Formation in Sanzhao sag, Songliao Basin[J]. Earth Science Frontiers, 2012, 19(1): 89- 99.]
[5] Miall A D. The geology of fluvial deposits[M]. Berlin Heidelberg: Springer Verlag, 1996: 75- 178.
[6] 吴胜和,纪友亮,岳大力,等. 碎屑沉积地质体构型分级方案探讨[J]. 高校地质学报,2013,19(1):12- 22. [Wu Shenghe, Ji Youliang, Yue Dali, et al. Discussion on hierarchical scheme of architectural units in clastic deposits[J]. Geological Journal of China Universities, 2013, 19(1): 12- 22.]
[7] 印森林,陈恭洋,戴春明,等. 河口坝内部储层构型及剩余油分布特征:以大港油田枣南断块长轴缓坡辫状河三角洲为例[J]. 石油与天然气地质,2015,36(4):630- 639. [Yin Senlin, Chen Gongyang, Dai Chunming, et al. Reservoir architecture and remaining oil distribution in mouth bar: A case study on the braided delta of long- axis gentle slope in Zaonan fault block of Dagang oilfield[J]. Oil & Gas Geology, 2015, 36(4): 630- 639.]
[8] 印森林,刘忠保,陈燕辉,等. 冲积扇研究现状及沉积模拟实验:以碎屑流和辫状河共同控制的冲积扇为例[J]. 沉积学报,2017,35(1):10- 23. [Yin Senlin, Liu Zhongbao, Chen Yanhui, et al. Research progress and sedimentation experiment simulation about alluvial fan: A case study on alluvial fan controlled by debris flow and braided river[J]. Acta Sedimentologica Sinica, 2017, 35(1): 10- 23.]
[9] 印森林,吴胜和,许长福,等. 砂砾质辫状河沉积露头渗流地质差异分析:以准噶尔盆地西北缘三叠系克上组露头为例[J]. 中国矿业大学学报,2014,43(2):286- 293. [Yin Senlin, Wu Shenghe, Xu Changfu, et al. Percolation differences of sedimentary outcrop in sand- gravel braided river: A case study of Triassic upper Karamay Formation outcrop in the northwest edge of Junggar Basin[J]. Journal of China University of Mining & Technology, 2014, 43(2): 286- 293.]
[10] 印森林,吴胜和,陈恭洋,等. 基于砂砾质辫状河沉积露头隔夹层研究[J]. 西南石油大学学报(自然科学版),2014,36(4):29- 36. [Yin Senlin, Wu Shenghe, Chen Gongyang, et al. A study on intercalation of sand- gravel braided river deposit based on outcrop section[J]. Journal of Southwest Petroleum University (Science & Technology Edition), 2014, 36(4): 29- 36.]
[11] Posamentier H W. Depositional elements associated with a basin floor channel- levee system: case study from the gulf of Mexico[J]. Marine and Petroleum Geology, 2003, 20(6/7/8): 677- 690.
[12]Posamentier H W, Davies R J, Cartwright J A, et al. Seismic geomorphology: an overview[M]//Davies R J, Posamentier H W, Wood L J, et al. Seismic geomorphology: applications to hydrocarbon exploration and production. London: Geological Society, Special Publications, 2007: 1- 14.
[13] Morend D, Pugin A, Gorin G E. High- resolution seismic imaging of outcrop- scale channels and an incised- valley system within the fluvial- dominated Lower Freshwater Molasse (Aquitanian, western Swiss Molasse Basin)[J]. Sedimentary Geology, 2002, 149(4): 245- 264.
[14] 杨陆强,果霖,朱加繁,等. 我国农用无人机发展概况与展望[J]. 农机化研究,2017,39(8):6- 11. [Yang Luqiang, Guo Lin, Zhu Jiafan, et al. The development situation and prospect of agricultural UAV in China[J]. Journal of Agricultural Mechanization Research, 2017, 39(8): 6- 11.]
[15] 包战,王树文. 有人/无人机协同作战能力生成问题研究[J]. 国防科技,2017,38(3):76- 79. [Bao Zhan, Wang Shuwen. Research on generating the cooperative operational ability of the manned/unmanned aerial vehicles[J]. National Defense Science & Technology, 2017, 38(3): 76- 79.]
[16] 弥永宏,张雪萍,李英杰. 基于倾斜摄影的三维城市建模研究[J]. 测绘与空间地理信息,2017,40(1):215- 217. [Mi Yonghong, Zhang Xueping, Li Yingjie. Research on 3D city modeling based on oblique photography[J]. Geomatics & Spatial Information Technology, 2017, 40(1): 215- 217.]
[17] 毕凯,李英成,丁晓波,等. 轻小型无人机航摄技术现状及发展趋势[J]. 测绘通报,2015(3):27- 31,48. [Bi Kai, Li Yingcheng, Ding Xiaobo, et al. Aerial photogrammetric technology of light small UAV: status and trend of development[J]. Bulletin of Surveying and Mapping, 2015(3): 27- 31, 48.]
[18] 王涵. 无人机航迹规划及导航定位系统研究[D]. 杭州:浙江大学,2017. [Wang Han. Research on the path planning and positioning navigation system of UAV[J]. Hangzhou: Zhejiang University, 2017.]
[19] 史文中,曹辉,张剑清. 基于高分辨率影像的城市三维建模[J]. 武汉大学学报(信息科学版),2004,29(9):783- 787. [Shi Wenzhong, Cao Hui, Zhang Jianqing. 3D urban building modeling based on high resolution satellite images[J]. Geomatics and Information Science of Wuhan University, 2004, 29(9): 783- 787.]
[20] 孙亮,夏永华. 基于无人机倾斜摄影技术测绘大比例尺地形图的可行性研究[J]. 价值工程,2017,36(8):209- 212. [Sun Liang, Xia Yonghua. The feasibility study of mapping large- scale topographic based on UAV oblique photography[J]. Value Engineering, 2017, 36(8): 209- 212.]
[21] 周晓波,王军,周伟. 基于无人机倾斜摄影快速建模方法研究[J]. 现代测绘,2017,40(1):40- 42. [Zhou Xiaobo, Wang Jun, Zhou Wei. Research on rapid modeling method based on UAV oblique photography[J]. Modern Surveying and Mapping, 2017, 40(1): 40- 42.]
[22] 朱如凯,白斌,袁选俊,等. 利用数字露头模型技术对曲流河三角洲沉积储层特征的研究[J]. 沉积学报,2013,31(5):867- 877. [Zhu Rukai, Bai Bin, Yuan Xuanjun, et al. A new approach for outcrop characterization and geostatistical analysis of meandering channels sandbodies within a delta plain setting using digital outcrop models: upper Triassic Yanchang tight sandstone formation, Yanhe outcrop, Ordos Basin[J]. Acta Sedimentologica Sinica, 2013, 31(5): 867- 877.]
猜你喜欢
中国科技纵横(2022年17期)2022-10-25
考试与评价·八年级版(2020年4期)2020-10-26
考试与评价·八年级版(2020年1期)2020-10-26
考试与评价·八年级版(2020年1期)2020-10-26
沉积与特提斯地质(2019年1期)2019-07-16
北京航空航天大学学报(2016年6期)2016-11-16
南方文学(2016年4期)2016-06-12
物理化学学报(2015年7期)2015-12-30
船舶标准化工程师(2015年5期)2015-12-03
中国塑料(2015年11期)2015-10-14
