
基于16位单片机MC9S12DG128B智能车系统的设计
2018-02-25 11:54李天全
电子技术与软件工程 2018年11期
李天全

摘要 本文以MC9S12DG128816位单片机为例,对智能车控制系统的主要结构和设计原理进行分析,阐述系统在设计方面的主要构成,对系统设计的优势进行阐述。
[关键词]单片 机智能车载系统 系统设计
在当前汽车电子产品不断更新和技术发展的同时,人们对汽车性能和控制、智能水平方面的要求也越来越高。智能系统在信息技术、电子技术及机械技术等不断发展的推动下,最终刺激了智能车控制系统的发展。现代智能车控制系统设计已经越来越完善,系统的功能越来越丰富,系统整体设计和构成更加智能化、可控化,极大地满足了人们的切实需求,也推动了我国汽车产业的快速发展,汽车电子产品等发展进入了全新时代。
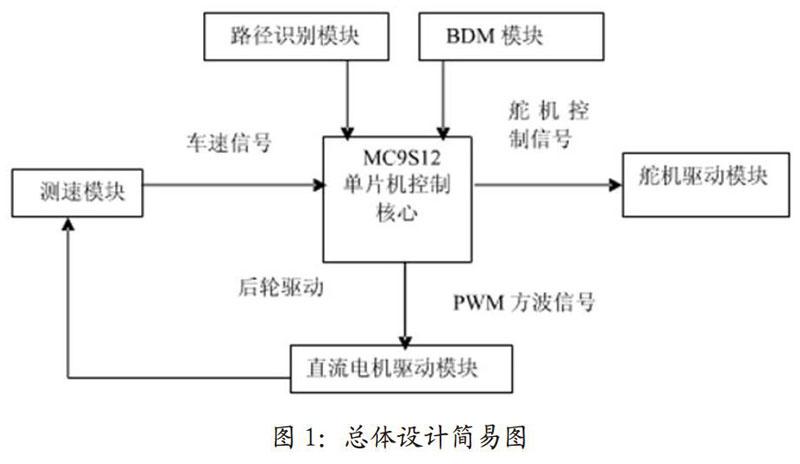
1 系统整体设计与构成
本文以16位单片机MC9S12DG128816为系统的核心,展开汽车智能控制系统设计方面的研究。该系统主要包括转向控制、路径检测和电机驱动、车速检测和电源管理等功能模块。单片机可以对反射的红外光信号进行检测,借助传感器对路径(黑线或白线)进行识别,将信号输入到单片机中,调节控制舵机,从而控制小轿车的转角,实现小车平滑转向,确保小车在规定的轨道线上形势(详见图1)。该系统借助红外光电传感器技术功能,采集信号,根据小车的速度判断速度与瞬时的最小误差,控制小车的速度,然后改善转速。整个系统中,电机控制、舵机控制两个模块功能是由单片机进行核心控制,系统整个运作依托于红外光电传感器技术和速度传感器控制技术,系统的最终控制目标是小车的行驶速度和行驶轨迹,从而提高小车转速,保证控制精准度。
2 系统硬件、软件设计及其构成
基于16位单片机MC9S12DG128816的智能车控制系统,是一个全自动的控制系统,能自动识别道路运行的智能汽车。根据总体设计可以知道系统的主要构成,其中传感器、信息处理及控制算法和执行机构是重要的构成部分。其中传感器和执行机构以及它驱动电路控制系统是系统硬件的主要构成;信息处理和控制算法是由单片机控制完成,所以,系统硬件设计主要包括电路和控制两个部分。而该系统的软件构成方面,主要包括路径识别、速度测量和速度控制方面。在软件和硬件共同构成下,系统最终能实现数据初始化,获取A/D转换数据,调整小车的转速角度的偏差,通过舵机控制角度,最终借助系统对电机转速进行控制,从而达到控制小车速度的目标。下面对系统中各个不同构成模块进行详细分析。
3 系统功能与模块设计
3.1 电源管理
电源是整个系统接通电源工作的重要部分,在系统设计中,电源稳定是保证系统正常运行的前提,而影响电源稳定的主要是电压和电流容量。且在系统接通电源时,电源转换效率还会受到其他方面的影响和干扰。一般电源管理模块主要是对电路电源进行管控,为了保证电源稳定,首先应该保证电路稳定,一般会设定多个电路,对电池电压进行转换,将其转换成各个模块所需的电压。电压一般由7.2V和2A/h充电电池提供,而根据系统中的各个模块,其中电机采用7.2V进行供电,红外发射接收管采用LM2940V进行供电,单片机采用TPS73505V进行供电,舵机则使用7.2V或6V的。
3.2 舵机驱动模块
舵机模块是系统中对小车速度和转速进行控制的一个重要模块。一般不同的舵机型号,其性能和设定参数均不相同。根据赛道和小车转速及角度等情况,一般在两种工作电压下,其速度可以达到一个峰值。即当电压为4.8V时,其速度为0.11sec/60,堵转力矩为6.lkg.cm;当电压为6.OV时,速度为0.08sec/60,堵转力矩为7.7kg.cm,所以,舵机驱动功能是受到电压的影响的。而试验发现,电压为6.OV时,舵机驱动的精准度更高,且工作效率更高。
3.3 电机驱动模块
检测车模相对赛道的偏移量、方向、曲线等均需要进行控制,根据车模的参数获得更加精准的小车模型。在本次研究的系统中,主要是通过MC9S12DG128816输出的信号,对驱动进行控制,主要是芯片对直流驱动电机的控制。在改变电机工作的频率情况下,改变电机两端的电压,从而达到控制转速的目的。但是,机电驱动模块还会受到外界因素的影响,对赛车速度也会产生一定的干扰。此时,我们需要使用PID算法来提高控制的精准度,尽可能缩小误差,以满足控制需求。通过PID对小车进行仿真设计,获取小车最高转速下的精准参数。为了简化电机驱动模块的电路设计,系统中的集成电机的驱动芯片,是由MC9S12DG128816控制的,从而对电机进行控制。
3.4 速度检测模块
为了使模型车能在赛道上正常沿着轨道运行,顺利完成比赛,且保证赛程和安全。必须考虑到赛道上急转弯的情况,很多小车在急转弯时,易发生位置误差,转速和角度等误差,需要对小车进行控制。开环控制电机转速,是当前使用比较普遍的一种方法,但是,这种方法并不能保证运行的需求,也会引起运行出现偏差,还会引起运行安全事故等。所以,处于安全、便捷等考虑,我们对电路、相应速度等进行优化,提高了小车在响应速度方面的精准性。设定在磁块均匀粘贴在电机上时,电机的动齿轮上,加用一个霍尔元件CS3020。根据原件输出的信号,当芯片接收到信号之后,启动电源,控制电压,然后在检测单元时间内,进行信号的测试,检测得出信号传输的最终脉冲数,进而能计算得出最为准确的赛车行驶速度。整个系统的每一个模块都是重要的功能分区,发挥着不同的作用,各个模块功能既相互影响,又相互牵制,系统的正常运行,必须要求每个模块功能的共同協调,才能达到最为理想的小车设计模型,实现系统应用的最终价值。
4 系统测试与结果
PID算法是系统精准进行控制的重要前提,能更好的控制小车,并且在起跑加速时,能设置前馈控制器,在PID的调节基础上,相当于一个全力加速器,形成一个分段控制,能较快的进行提速。假设一个赛车车模采用1/10的仿真模型系统,根据其机械机构,在竞赛中,底盘部分及转向和驱动等进行控制,分别对其前轮转向和后轮驱动的参数进行仿真试验。设定改装前的赛车参数如下,详见表1。
根据PID算法对小车进行改造,根据模型数据分析,改造后的小车长度为33cm,宽度20cm,车模高度22cm,探出的举例为12cm,传感器的个数使用了15个。车模重量1.5kg,最终的赛道检测频率18次/s。通过改造之后的赛车,在系统控制中心的速度检测,最终,车模的速度控制精度提升,舵机转向控制提升,测速传感器工作更快,整个性能测试过关,且车模使用效果显著优于改造前。
5 结束语
该系统在结构设计上以16位芯片的MC9S12DG128816单片机作为核心控制系统,能对红外传感器产生的信号进行路径检测,提高了处理速度,使得其操作控制更加精准,减轻了其他数据处理的难度,小车机械安装更加合理、简约,提升了小车整体的质量和性能,能实现小车循线的快速行驶,提升了小车的行驶速度。
参考文献
[1]谭海明,耿欣,基于单片机的智能车系统的研究与实现[J].数码世界,2017(01):18-18.
[2]柯文德,谢志浩.基于单片机的智能循迹测速小车系统及自循迹智能小车,CN205880662 U[P].201 7.
猜你喜欢
保健与生活(2023年16期)2023-08-04
电源技术(2017年1期)2017-03-20
电测与仪表(2016年3期)2016-04-12
电源技术(2015年1期)2015-08-22
电力建设(2015年2期)2015-07-12
湖南大学学报·自然科学版(2014年2期)2014-12-25
