基于变步长最大功率跟踪法的现代光伏农业控制策略研究
2018-02-13 11:27史建平蔡纪鹤
江苏农业科学 2018年24期
史建平, 张 兵, 蔡纪鹤
(常州工学院电气与光电工程学院,江苏常州 213032)
能源和环境危机成为当今世界的两大难题,“十三五”计划的起步之年,光伏农业正式被国家能源局纳入到光伏扶贫队列,将太阳能发电与种植、养殖业相结合,充分利用农业设施,增加农民收入。因此,光伏农业项目的发展潜力正在逐渐被发掘。在山东、江苏、江西等阳光较为充足的农业大省,能够同时为植物和光伏设施提供光能。假设在全国大面积、大范围推广光伏农业产品,市场前景将相当广阔,规模可达千亿元,5年内甚至能够达到万亿元。可见,光伏农业具有着相当可观的投资收益。另一方面,光伏农业的发展也有利于降低温室气体排放。
光伏发电的发展不仅可以逐步降低人类对非可再生资源的依耐性,而且能有效地减少污染,具有明显的优势。但是太阳能电池的功率输出是非线性的,而且环境变化对其电能的输出有很大影响。最大效率点跟踪技术(maximum power point tracking,简称MPPT)可以有效地解决传统光伏发电系统中的效率过低、成本过高的问题,充分发挥光伏组件的效能[1]。
常见的MPPT控制方法包括固定电压法(CTV)、扰动观察法(P&O)、电导增量法(INC)等[2]。固定电压法算法简单、稳定性高,但是系统跟踪精度差。扰动观察法对传感器精度要求不高,但稳定性较差,易造成系统能量丢失,而且跟踪步长不好确定[3]。电导增量法通过检测光伏电池两端的电压和输出电流,并根据功率对电压的变化率与输出电流、电压之间的关系完成最大功率点跟踪。电导增量法对最大功率点的判断准确,振荡小,但同样存在着步长选择和误判问题。固定扰动步长影响到最大功率点跟踪的控制效果,无法兼顾效率性和稳定性。现有的智能变步长控制方法提升了系统的快速跟踪能力和稳态效果,但设计难度和成本较高,通用性较差。智能算法虽有很好的控制效果,但控制算法复杂,依赖历史经验,控制器的设计成本较高[4-6]。
为了解决电导增量法的步长选择和外部环境突变时的误判问题[7-8],提出了一种改进的变步长电导增量法;本研究首先从光伏电池的输出特性进行分析,然后对固定步长电导增量法提出改进方案,详细分析工作原理,最后通过仿真和试验来验证该方法的可行性。
1 电导增量法工作原理
1.1 光伏电池输出特性
光伏电池的数学模型的I-V方程[2,9-10]为:
(1)
(2)
(3)
式中:I为光伏电池输出电流;U为光伏电池输出电压;Isc为光伏阵列的短路电流;Uoc为光伏阵列的开路电压;Um为光伏阵列最大功率点的输出电压;Im为光伏阵列最大功率点的输出电流;C1、C2为对应公式(1)的2个参数。此时,Sref=1 000 W/m2、Tref=25 ℃为参考光照度及参考电池温度。
在不同外部环境下光伏电池的伏安特性I-V曲线和输出特性P-V曲线如图1所示。其P-V特性呈现非线性特征,最大功率点随着环境温度、光照度以及光伏板的物理参数等变化而变化。

1.2 电导增量法工作原理
由光伏电池特性可知,在一定的光照和温度条件下的最大功率点有且仅有1个。在光伏发电系统运行过程中,必须通过一定的控制手段来保证光伏电池板在不同环境下都在最大功率点附近工作,以提高电能的转换效率。此过程即为最大功率点跟踪控制。
电导增量法属于MPPT控制比较常用的算法[11]。通过分析光伏电池板的P-U特性曲线可知,在最大功率点的斜率为0,因此有
(4)
电导增量法原理图如图2所示。由公式(4)可以得到在最大功率点处,dI/dU=-I/U=0。当dI/dU>-I/U时,位于最大功率点左侧,需要增大参考电压保证系统向最大功率点靠近;当dI/dU<-I/U时,位于最大功率点右侧,需要减小参考电压保证系统向最大功率点靠近。即在特性曲线左侧 dI/dU+I/U>0,曲线右侧dI/dU+I/U<0。
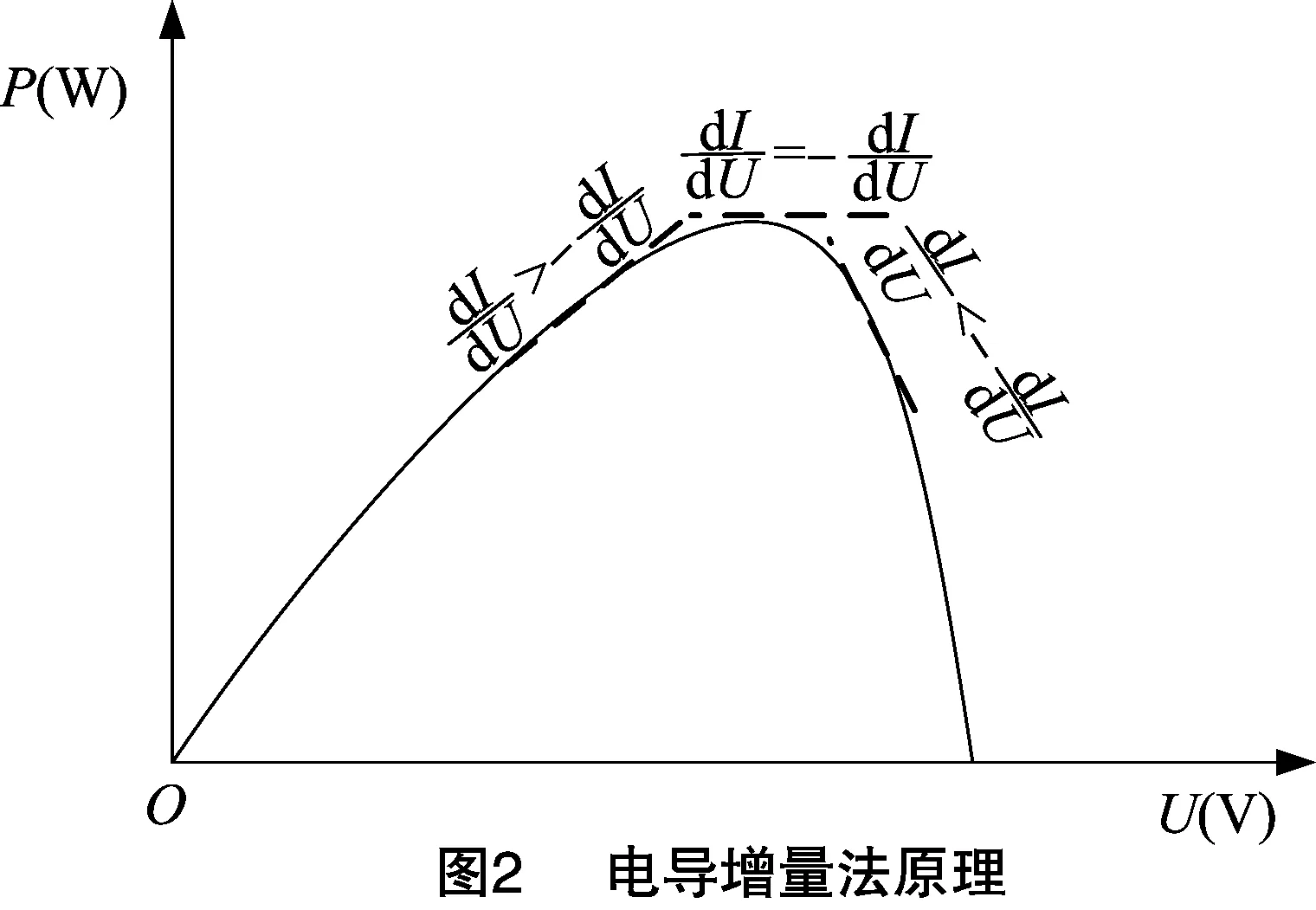
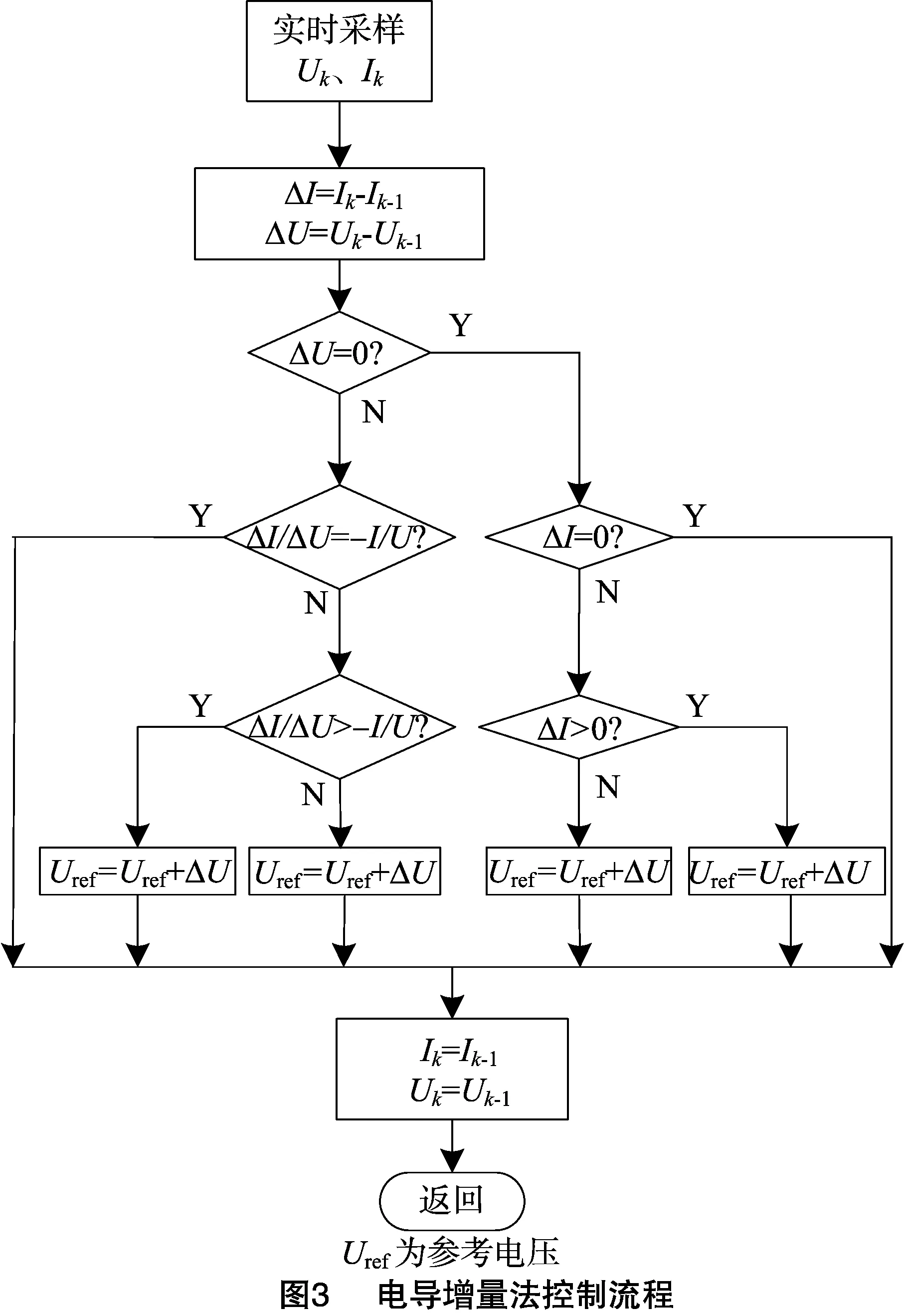
图3为电导增量法控制流程图,其中,Uk-1和Ik-1为光伏电池在k-1时刻的输出电压和电流,然后通过调节晶体管占空比D,使其在当前输出电压基础上增大1个电压分量ΔU,得出k时刻的电压Uk和电流Ik。
2 改进的变步长电导增量法
固定步长电导增量法无法兼顾系统的稳定性和效率性,而模糊控制等智能控制算法的应用,虽然提高了其稳定性和效率性,但控制算法复杂,在工程中无法广泛应用。因此,针对电导增量法扰动步长的选择问题,本研究提出了1种改进的变步长电导增量法。
在最大功率点跟踪过程中,光伏阵列在k-1时刻的输出电压为Uk-1,电流为Ik-1,然后按照预定步长调节晶体管占空比D,使其在当前输出电压基础上增大1个电压分量ΔU,采样到k时刻的电压Uk和电流、Ik,得出:
(5)
式中:ΔUk、ΔIk为k时刻的电压、电流分量。
继续调节占空比,采样到k+1时刻的电压Uk+1和电流Ik+1,得出:
(6)
ΔP=Uk+1Ik+1-UkIk。
(7)
式中:ΔUk+1、ΔIk+1为k+1 时刻的电压、电流分量;ΔP为k+1时刻的功率分量。
由电导增量法原理分析结果可知,在特性曲线左侧 dI/dU+I/U>0,曲线右侧dI/dU+I/U<0。
因此,建立1个步长判定参数H:
(8)
由公式(8)可知,若H>0,说明工作点运行在特性曲线单侧,仍未达到最大功率点,依旧使用大步长电导增量法搜寻最大功率点,效率优先;若H≤0时,工作点经过了最大功率点,此时系统的跟踪步长减小,使之快速收缩到最大功率点附近,相比定步长MPPT控制方法,提高了光伏电池的利用率。图4为这种改进的变步长电导增量法的控制流程图。
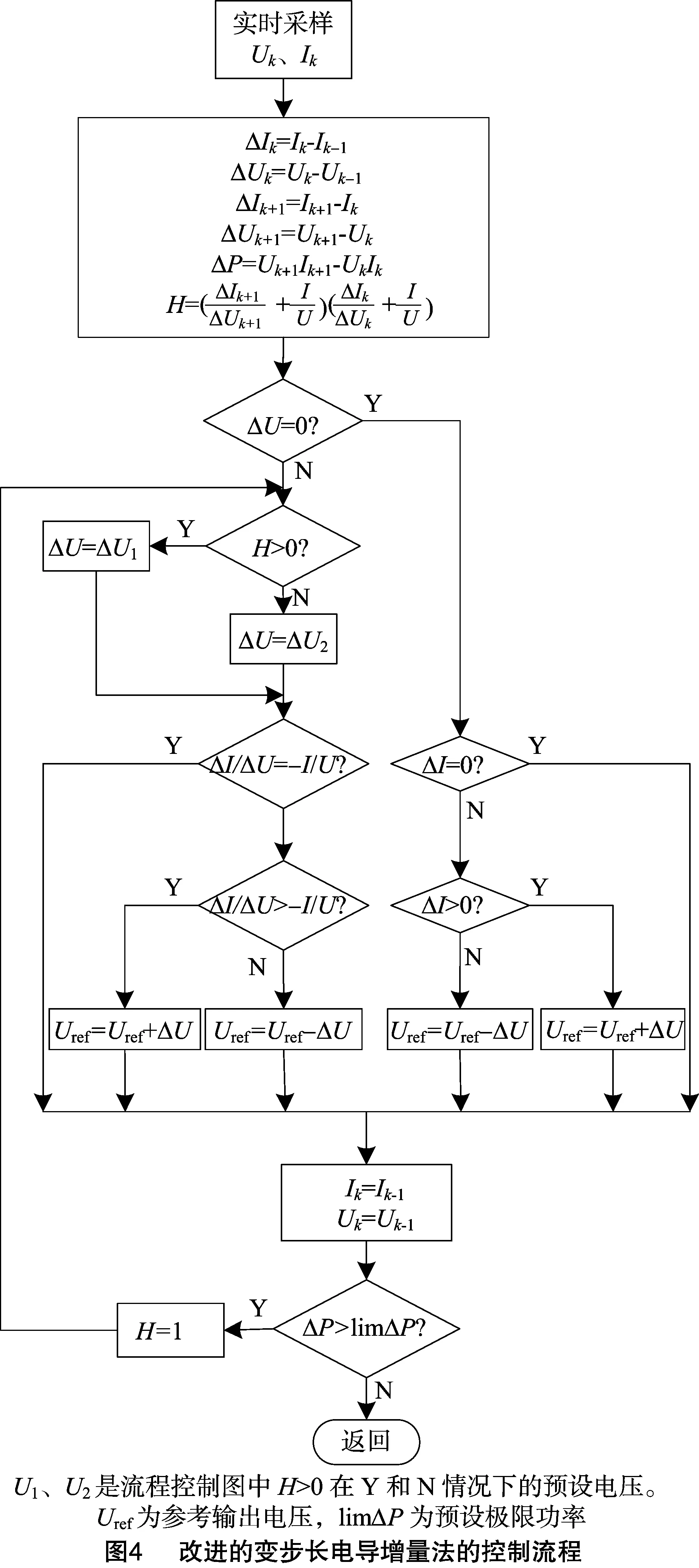
若外部环境变化不明显,导致系统内部功率细微的变化,此时仍旧可以使用小步长进行搜索,即直接返回;若外部环境发生突变,而且变化较大,导致ΔP较大,超过了预设的极限值limΔP,则输出H=1。这样,可以较快地适应外界环境的突变,以实现较高效率的最大功率跟踪。
图5为该控制方法工作过程,具体步骤如下:(1)以A点为初始点,采用大步长电导增量法搜索最大功率点,经过了B、C点,得到功率点A到B的斜率kBA>0,功率点B到C的斜率kCB>0;即H>0。这里看出在第一次通过最大功率点时H的值与在单侧工作时H的值是一致的,均大于0;(2)依旧采用大步长电导增量法进行跟踪,但是因为电导增量法检测到该点在右侧,所以需要减小参考电压保证系统向最大功率点靠近,此时得到D点,且功率点C到D的斜率kDC<0,则H<0;(3)而由于H<0,此时跟踪方法改为小步长电导增量法,直到最终逼近最大功率点;(4)如若外部环境发生突变,且变化较大,则通过赋值H为1的方法将跟踪方法改为大步长方案。

综上所述,在离最大功率点较远时采用大步长电导增量法,能使跟踪能力得到提高;在接近最大功率点后,切换为小步长跟踪方案,使工作点在最大功率点附近工作,这样能提高光伏组件的平均输出功率,使系统可以快速且稳定地追踪到最大功率点。当外部环境发生变化时,功率变化超过了一定的阈值,笔者通过给参数H赋值的方法来进行步长选择,同时晶体管占空比分量ΔD变为正常,以使系统快速跟踪外部的环境变化,这种方法有效地解决了电导增量法在外界环境发生突变时引起的误判问题。此外,由于该方法设计简单、系统成本较低,不依赖于历史经验,不需要在原本的检测装置基础上添加新的硬件电路,因此能成功地应用于分布式光伏农业发电系统中。
3 仿真和试验
3.1 仿真分析
通过Matlab软件对本研究提出的变步长MPPT方法进行仿真验证。采用常用的MPPT控制电路,光伏阵列模型参数为:光伏电池温度25 ℃,初始光照度1 000 W/m2,最大功率输出功率100 W,开路电压20 V。
选择在温度25 ℃,光照度900 W/m2的条件下,对传统电导增量法和本研究所提的控制方法进行仿真比较,得到的输出电流波形如图6所示。通过比较图6-a、图6-b可以明显发现,传统固定步长电导增量法在0.04 s时接近最大功率点,而本研究提出的控制方法在0.03 s时就接近最大功率点;因此,本研究提出的控制方法能更快提高跟踪速度,还能有效地降低振荡幅度,提升系统的稳定性。
分别在光照度E突变和微变的情况下对太阳能电池的工作电流进行仿真。在温度不变时,系统在0.5 s时给光照度1个阶跃变化。在光照度E由1 000 W/m2突变为 600 W/m2情况下输出电流的仿真波形如图7所示。由于光照度突变导致系统远离最大功率点,系统可以根据工作点通过调节ΔD,迅速重新工作在最大功率跟踪点(maximum power point,简称MPP)附近,系统在稳定后的输出电流I波动很小。

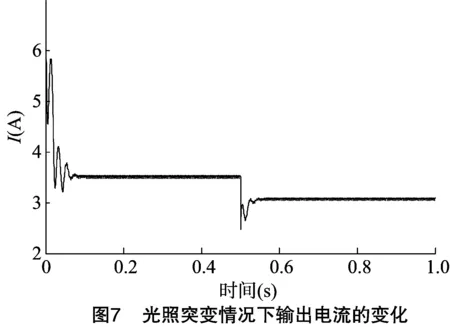
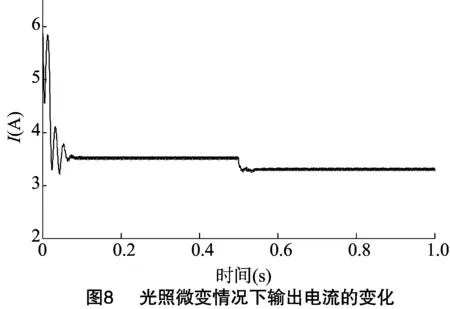
图8为在光照度E由1 000 W/m2变化为800 W/m2情况下输出电流的仿真波形,由于光照度微变导致系统稍稍偏离了最大功率点,系统判定依旧采用小步长方案,这样能更快地工作在MPP附近,节约了扰动时间,提高了效率。
3.2 试验验证
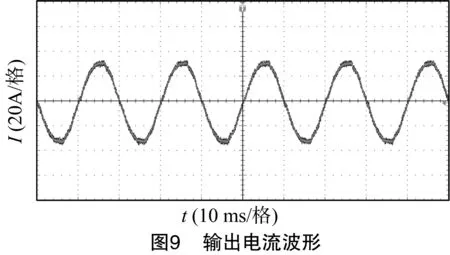
为了验证此MPPT算法的可行性,利用笔者所在实验室的100 W实验平台进行试验验证。采用本研究提出的MPPT控制方法,试验得到输出电流波形如图9所示,能够满足并网的要求。
4 结论
本研究提出的基于电导增量法的变步长MPPT控制方法具有较高的效率和稳定性,而且设计简单、成本较低、易于实现。而光伏农业的光伏逆变器受到体积和成本的制约,该方法高效率、低成本、易实现的特点表现出与分布式发电系统较高的契合度,此MPPT方法能成功地应用在实验室已有的分布式光伏发电系统中。仿真和试验结果说明了该方案在光照变化的情况下仍能快速稳定地进行最大功率跟踪,方案可行。
猜你喜欢
传感器世界(2022年7期)2022-10-12
当代陕西(2022年6期)2022-04-19
电子制作(2018年14期)2018-08-21
农业工程技术·温室园艺(2016年9期)2017-04-23
电信科学(2016年9期)2016-06-15
电测与仪表(2016年20期)2016-04-11
西南医科大学学报(2016年4期)2016-01-03
电子设计工程(2015年16期)2015-02-27
中国药业(2014年21期)2014-05-26