三相电压型PWM整流器的新型双闭环控制方法
2018-02-08 01:33朱志键唐卫民
电力工程技术 2018年1期
朱志键, 唐卫民
( 国网无锡供电公司, 江苏 无锡 214000)
0 引言
基于脉冲宽度调制(PWM)技术的三相电压型整流器能有效减少交流侧谐波含量,具有直流侧电压可控、功率因数接近1及能量双向流动的优点。因此,三相电压型PWM整流器在工业上得到了越来越广泛的应用[1]。目前应用广泛且研究较多的控制策略是dq坐标系下的电压电流双闭环控制策略[2]。
传统双闭环控制策略的电流环采用前馈解耦控制方法分别控制有功和无功电流, 并用PI控制器作为电流调节器,电压环用PI控制器直接把直流侧电压和有功电流联系起来。文献[3]研究了L、C参数的实用区间和PI参数整定及其对直流侧电压、交流侧谐波和功率因数的影响, 提出了一套模范化的设计和整定方式,但整定过程繁琐,时间成本较大。文献[4—6]分别介绍了整流器在模块化多电平换流器(MMC)和电动汽车中的应用。文献[7-9]基于合成矢量的思想将双输入双输出模型转换为单输入单输出模型, 使问题得到了简化。文献[10]利用将无功电流反馈到有功电流的动态控制中,提升了有功电流的动态响应速度。
因此,参数整定复杂、无抗扰环节以及电压外环控制粗糙是传统双闭环控制器的不足之处。为此,文中研究了基于内模控制的新型双闭环控制策略。所提的新型控制策略既简化了控制器参数整定,从新的角度拓展了控制策略, 实现了线性化的间接电压控制,可同时获得直流侧电压的快速跟踪和优良抗扰控制。
1 数学模型
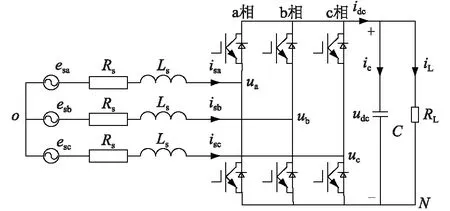
图1 三相电压型PWM整流器的拓扑Fig.1 Topology of three-phase VS-PWM rectifier
图1中,Rs为等效损耗电阻。为便于建模, 定义开关函数sk:
(1)
式中:k=a,b,c,且可知ukN=udcsk。理想对称时,有:
(2)
式(2)是对三相VS-PWM模型的精确描述。由此可得dq坐标系下的数学模型为:
(3)
式中:sd和sq是sa,sb,sc的相关函数,可看作dq坐标系中的开关函数。
2 电流环控制
图2是内模控制(IMC)的经典反馈控制图[11]。传统电流环的控制一般采用经典控制理论中的前馈解耦控制[2, 12],其中有功和无功电流的彻底解耦需要精确的整流器模型和参数,而控制器的参数调试过程非常繁琐且需反复试验。针对上述问题,文中将内模解耦控制引入到电流环的控制中。
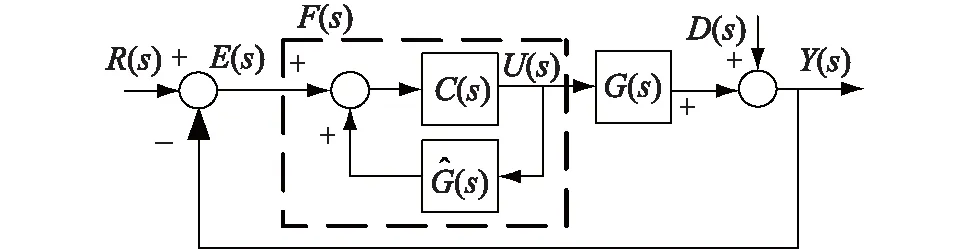
图2 IMC结构Fig.2 Control block of IMC
Y(s)=G(s)U(s)
(4)
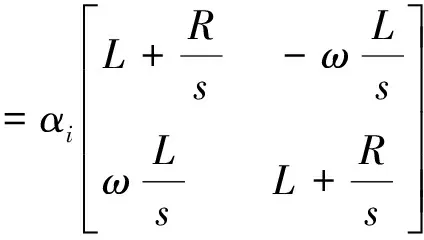
其中:
(5)

(6)
为了增加系统的稳定性和鲁棒性, 需要引入低通滤波器[8, 13-14]。因此,低通滤波器L(s)可选为:
(7)
则C(s)为:
(8)
图2中F(s)为:
(9)
综上所述,可得电流环的内模解耦控制如图3所示。
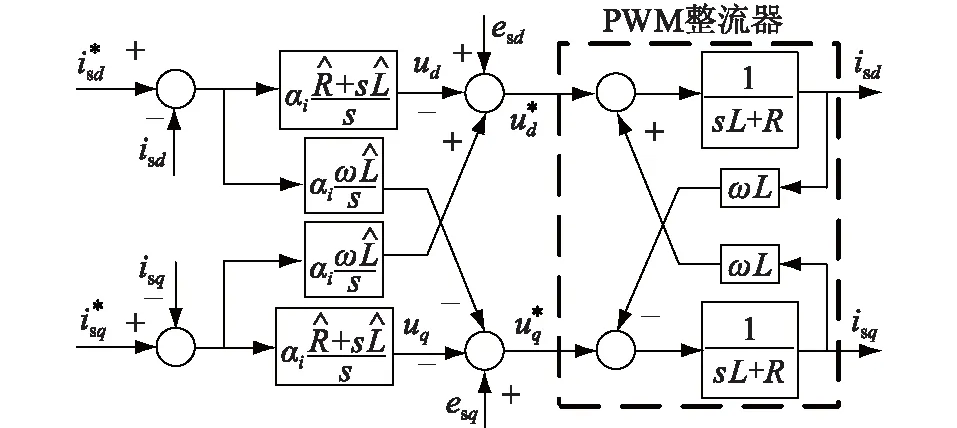
图3 电流环内模解耦控制Fig.3 Decoupling control block with IMC of current loop
由图3可知,电流内环的内模解耦控制只需调试αi。鉴于一阶系统带宽与阶跃响应上升时间的近似关系为τ=2.2/αi[13]。因此,αi越大,在一定程度上电流环的跟踪响应也会越快。
由图2可得传递函数为:
(10)
(11)

3 电压环控制
3.1 二自由度IMC
三相VS-PWM电压环的控制目标是实现DC电压的快速跟踪和优良抗扰控制。同样地,电压环的控制器也可采用IMC设计,但却无法获得较好的抗扰性。为此,引入文献[15]中所采用的二自由度IMC来解决此问题,如图4所示。C1(s)和C2(s)构成了二自由度内模控制器,其中C1(s)控制系统的跟随特性,C2(s)控制系统的抗扰特性。

图4 二自由度IMCFig.4 Two-degrees-of-freedom IMC
图4为二自由度IMC,由图4可得:
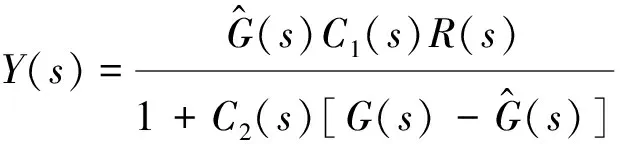
(12)
(13)

3.2 二自由度线性抗扰控制
由式(3)可知,isdsd和isqsq是两个典型的非线性变量, 传统电压环直接用PI控制器把DC电压和有功电流联系起来, 并没有考虑模型的线性问题。文中在充分考虑线性控制的基础上提出了基于功率守恒的二自由度内模线性抗扰控制。
忽略等效损耗电阻Rs所引起的损耗,则三相交流侧输出的有功功率Pac和直流侧的有功损耗Pdc相平衡, 即Pac=Pdc。为便于控制器的设计,采用dq坐标系下的有功和无功功率表达式。如下所示:
(14)
直流侧有功功率为:
(15)
联立式(14)和式(15), 有
(16)
(17)


图5 电压环二自由度内模抗扰线性控制Fig.5 Disturbance-rejection linear control of voltage loop with two-degrees-of-freedom IMC
电流环系统参数与模型参数完全匹配时,由图5和式(11)有:
(18)

考虑到内模控制器的可实现性,低通滤波器L1(s)和L2(s)可取为:
(19)
(20)
故内模控制器C1(s)和C2(s)分别为:
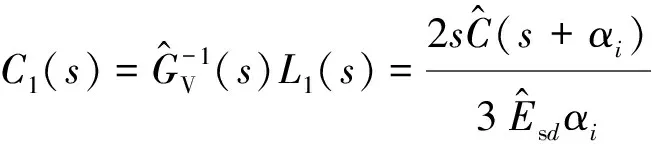
(21)

(22)
根据式(13),当模型精确匹配时,有:
(23)
由式(23)可知,系统的跟踪控制和抗扰性可通过分别调节αV1和αV2来调节,在调节的过程中相互之间并不影响。因此,可根据跟随性能指标要求确定αV1,再根据抗扰性的要求确定αV2,以使获得优良的跟随性和抗扰性。
鉴于三相电压型PWM整流器常运行于单位功率因数, 即q轴参考电流为0, 则可建立如图6所示的新型双闭环控制框图。

图6 基于IMC的双闭环控制Fig.6 Control block of the double closed loop based on IMC
4 仿真与分析
为了验证所提出的内模控制策略的正确性和可行性, 在MATLAB/SIMULINK下搭建了仿真平台。仿真所采用参数为:交流侧线电压RMS为380 V;交流侧电感L=6 mH;交流侧电阻Rs=0.1 Ω;直流侧电容C=6000 μF;直流参考电压为700 V;直流侧负载为100 Ω;主电路开关频率为10 kHz;电流环带宽为2000 Hz。
稳态仿真结果如图7所示, 其中(a)图为A相输入电压(10%)和输入电流波形图, 图中输出电流和输入电压几乎完全同步, 功率因数接近1。(b)图对应DC侧输出电压波形, 其超调小, 调节时间短, 并快速稳定于给定值700 V。图(c)为无功电流波形, 其值在零参考值附近震荡, 振幅小于1, 表明其平均无功功率为0, 即功率因数为1。



图7 PWM整流器稳态波形Fig.7 Waveforms of PWM rectifier in steady state
跟踪控制和抗扰控制的仿真结果如图8所示。0.2 s时负载由100 Ω变为20 Ω。分析比较图8中的4种情况, 可知在αV1不变的情况下改变αV2,输出电压响应曲线的跟踪特性不变,而抗扰特性随αV2的减小而变好;在αV2不变的情况下改变αV1,输出电压曲线的抗扰特性不变,而跟踪特性随αV1的减小而变好。
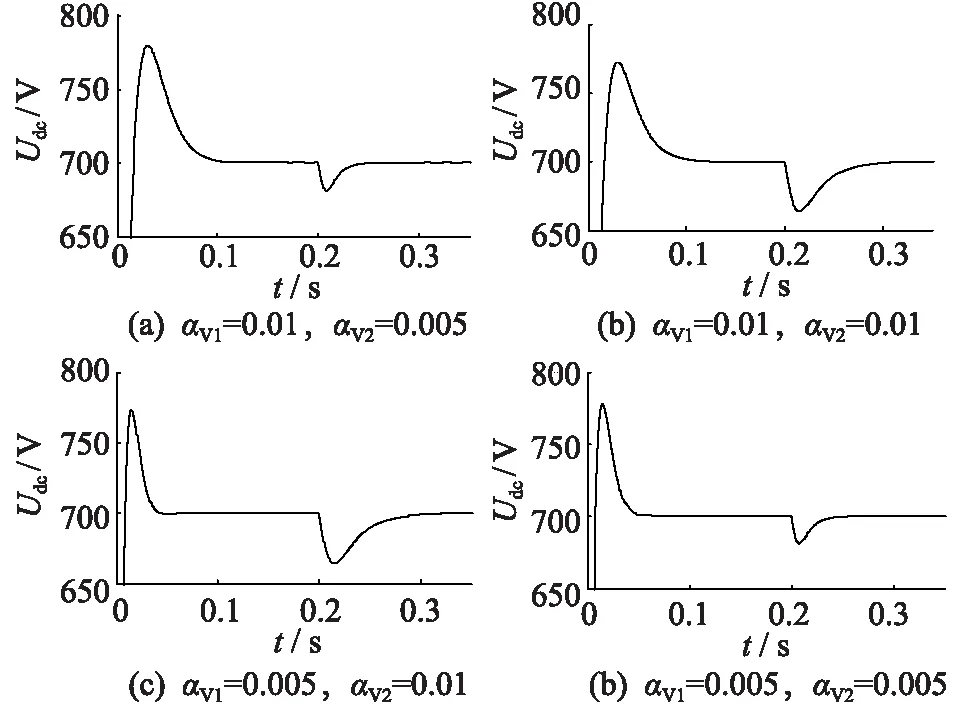
图8 PWM整流器输出电压波形Fig.8 The comparison of rapid elimination of disturbance
仿真结果表明,系统的跟随控制和抗扰控制可通过分别调节αV1和αV2来控制:仅调整αV1的参数值,可调节整流器输出电压的跟踪特性而不影响抗扰特性;同样的,仅调整αV2的参数值,可调节整流器输出电压的抗扰特性而不影响跟踪特性。另外,对于αV1和αV2,较小的参数值均可获得更优良的性能。实际情况下αV1和αV2的参数值可依据成本和性能折中选择。
5 结语
文中在详细分析内模控制的基础上, 提出了二自由度内模控制策略。新型双闭环控制策略既简化了控制器参数整定且从新的角度拓展了控制策略, 又实现了线性化的间接电压控制且可同时获得直流侧电压的快速跟踪和优良抗扰控制。仿真结果表明:整流器输出电压的跟随控制和抗扰控制可独立调节,对于文中滤波器表达式下的αV1和αV2,较小的参数值可获得更优良的性能。
[1] ZHANG X, MI C C, YIN C. Active-charging based power train control in series hybrid electric vehicles for efficiency improvement and battery lifetime extension [J]. Journal of Power Sources, 2014, 245: 292-300.
[2] BLASKO V, KAURA V. A new mathematical model and control of a three-phase AC-DC voltage source converter [J]. Power Electronics, IEEE Transactions on, 1997, 12(1): 116-123.
[3] 汪万伟, 尹华杰, 管 霖. 双闭环矢量控制的电压型PWM整流器参数整定[J]. 电工技术学报, 2010, 25(2): 67-72.
WANG Wanwei, YIN Huajie, GUAN Lin. Parameter setting for double closed-loop vector control of voltage source PWM rectifier [J]. Transactions of China Electrotechnical Society, 2010, 25(2): 67-72.
[4] 王 靓, 任洪强, 陈国宇, 等. 基于 MMC 的三相四线制电能质量补偿装置[J]. 江苏电机工程.
WANG Liang, REN Hongqiang, CHEN Guoyu, et al. A compensation device of power quality in three-phase four-wire system based on modular multi-level inverter [J]. Electric Power Engineering Technology, 2016, 35(1):57-60.
[5] 薛钟兵, 彭 程. 新能源发电与电动汽车充换储站协调运行研究[J]. 江苏电机工程, 2014 (5): 36-38.
XUE Zhongbing, PENG Cheng. Research on the coordinated operation of new energy power generation and EV charging storage station [J]. Electric Power Engineering Technology, 2014 (5): 36-38.
[6] 许晓慧, 陈丽娟, 张 浩, 等. 规模化电动汽车与电网互动的方案设想[J]. 江苏电机工程, 2012, 31(2): 53-55.
XU Xiaohui, CHEN Lijuan, ZHANG Hao, et al. Conceptual design of interaction between large-scale electric vehicles and grid[J]. Electric Power Engineering Technology, 2012, 31(2): 53-55.
[7] YIN B, ORUGANTI R, PANDA S K, et al. A simple single input-single-output (SISO) model for a three-phase PWM rectifier [J]. IEEE Transactions on Power Electronics, 2009, 24(3): 620-631.
[8] 陈耀军, 钟炎平. 基于合成矢量的电压型PWM整流器电流控制研究[J]. 中国电机工程学报, 2006, 26(2): 143-148.
CHEN Yaojun, ZHONG Yanping. Study on the current control for voltage-source PWM rectifier using complex vectors [J] . Proceedings of the CSEE, 2006, 26(2): 52-56.
[9] BRIZ F, DEGNER M W, LORENZ R D. Analysis and design of current regulators using complex vectors [J]. IEEE Transactions on Industrial Applications, 2000, 36(3): 817-825.
[10] 钟炎平, 沈颂华. PWM整流器的一种快速电流控制方法[J]. 中国电机工程学报, 2005, 25(12): 52-56.
ZHONG Yanping, SHEN Songhua. A fast current control scheme for PWM rectifier [J]. Proceedings of the CSEE, 2005, 25(12): 52-56.
[11] 朱志键, 王 杰. 三相电压型PWM整流器的二自由度内模控制[J]. 电网与清洁能源, 2015, 31(11):1-6.
ZHU Zhijian, WANG Jie. Two-degrees-of-freedom internal model control of the three-phase voltage-sourced PWM rectifier [J]. Power System and Clean Energy, 2015, 31(11):1-6.
[12] 张崇巍, 张 兴. PWM整流器及其控制[M]. 北京: 机械工业出版社, 2003.
[13] OTTERSTRN R. On control of back-to-back converters and sensorless induction machine drives [M]. Chalmers University of Technology, 2003.
[14] 宋文祥, 尹 赟. 一种基于内模控制的三相电压型 PWM 整流器控制方法[J]. 电工技术学报, 2012, 27(12): 94-101.
SONG Wenxiang, YIN Yun. A control method of three-phase voltage type PWM rectifier based on internal model control [J].Journal of Electric Technology, 2012, 27(12):94-101.
[15] 周渊深, 朱希荣. 改进型二自由度内模控制及其应用研究[C]∥2009 中国控制与决策会议论文集 (2):2009.
ZHOU Yuanshen, ZHU Xirong. Improved two degree of freedom internal model control and its application [C]∥2009. Papers Collection on Control and Decision Making of China(2):2009.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
科学家(2021年24期)2021-04-25
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
通信电源技术(2016年4期)2016-04-04
四川电力技术(2015年5期)2015-12-19
电源技术(2015年1期)2015-08-22
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年21期)2015-04-09