基于多级综合分类器的红外目标检测
2018-01-29 17:05王培早,王卫华,王海松,陈曾平
软件工程 2017年12期
王培早,王卫华,王海松,陈曾平

摘 要:文章针对大视场不同尺度的红外目标检测问题,以大视场红外搜索系统为基础,提出了一种基于多级综合分类器的实时红外目标检测算法,实现由粗到精的虚警剔除。在预处理阶段,该算法首先进行尺度放缩变换,在不同的尺度上采用Robinson滤波抑制背景,再将不同尺度的滤波结果在原始尺度上融合;在对图像进行背景抑制的基础上,构造多级串联的综合分类器:在目标的粗检测阶段,采用模糊隶属度融合的分类器剔除大部分虚警;在目标的精细检测阶段,提取候选目标的特征并进行类间特性分析,设计基于Fisher系数加权的综合分类器以实现真实目标的确认与虚警剔除。实验表明,该算法能够有效剔除与真实目标特性相似的虚警干扰,对尺度变化的红外运动目标具有较好的检测效果。
关键词:Robinson滤波;多级综合分类器;模糊隶属度融合;Fisher判据;红外目标检测
中图分类号:TP391.4 文献标识码:A
Infrared Target Detection Based on the Multi-Level Synthesis Classifier
WANG Peizao,WANG Weihua,WANG Haisong,CHEN Zengping
(National University of Defense Technology,Changsha 410073, China)
Abstract:The paper proposes a real-time infrared target detection algorithm based on the multi-level synthetic classifier for the large-field of view infrared search system to achieve false alarm elimination from coarse to fine.In the preprocessing stage,the algorithm firstly transforms the image sequence into different scales and uses the Robinson filtering to suppress the background,then fuses the filter results on the original scale.Based on the background suppression of the image,the paper constructs the multi-level series of the synthesis classifier.In the target coarse detection phase,it uses the fuzzy membership fusion classifier to remove most of the false alarm.In the target fine detection phase,it extracts the characteristics of the candidate targets and carries out the analysis of the inter-class characteristics to design an integrated classifier based on Fisher coefficient weight to realize the real target recognition and false alarm elimination.The experimental results show that the proposed algorithm can effectively eliminate the false alarm with similar characteristics to the real targets.It has a good detection effect on the moving infrared target changing in scale.
Keywords:Robinson filtering;multi-level synthesis classifier;fuzzy membership fusion;Fisher criterion;infrared target
detection
1 引言(Introduction)
近年來,大视场光电系统的发展为复杂背景下目标的探测提供了解决的途径。与传统的小视场光电搜索系统相比,大视场光电搜索系统的目标检测具有以下难点:图像数据量大,数据率高,背景十分复杂,目标先验信息未知,目标识别的要求高等[1,2]。正是由于上述技术难点的存在,使得光电搜索系统目前在复杂战场环境下的应用还存在目标检测概率偏低、虚警概率偏高等问题[3]。如何有效地在大视场复杂背景的光电图像中检测识别目标成为限制系统应用迫切需要解决的关键问题。
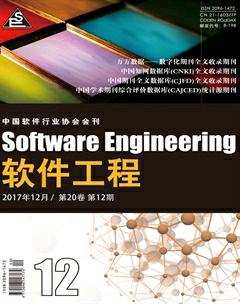
目前,红外目标的检测方法主要有单帧检测法和多帧检测法。单帧图像的检测方法主要有均值滤波、中值滤波等;多帧图像的检测方法主要有帧间差分法、管道滤波法等[4-6]。每种方法都有自己特定的应用背景,比如,帧间差分法主要针对运动目标进行检测[7]。本文以实际采集的红外无人机图像序列为例来阐述大视场复杂背景下的目标检测算法。针对无人机背景灰度变化、目标探测距离未知、虚警干扰多等难题,本文提出了一种基于多尺度Robinson滤波和自适应分割的检测算法对图像序列进行分割;在得到分割图像后,我们构造了多级串联的综合分类器来提取真实的目标。首先采用模糊隶属度融合的分类器剔除大部分的虚警干扰;然后对疑似目标的结构特征和灰度统计特征进一步进行类间特征分析,选取表现良好的特征;最后将选取的特征与多帧之间的运动特性相融合,根据每个特征的置信度构建基于Fisher系数加权的综合分类器,实现低空背景下无人机目标的有效检测。算法流程图如图1所示。endprint
2 基于多尺度Robinson滤波的图像预处理(Image
preprocessing based on multi-scale Robinson
filtering)
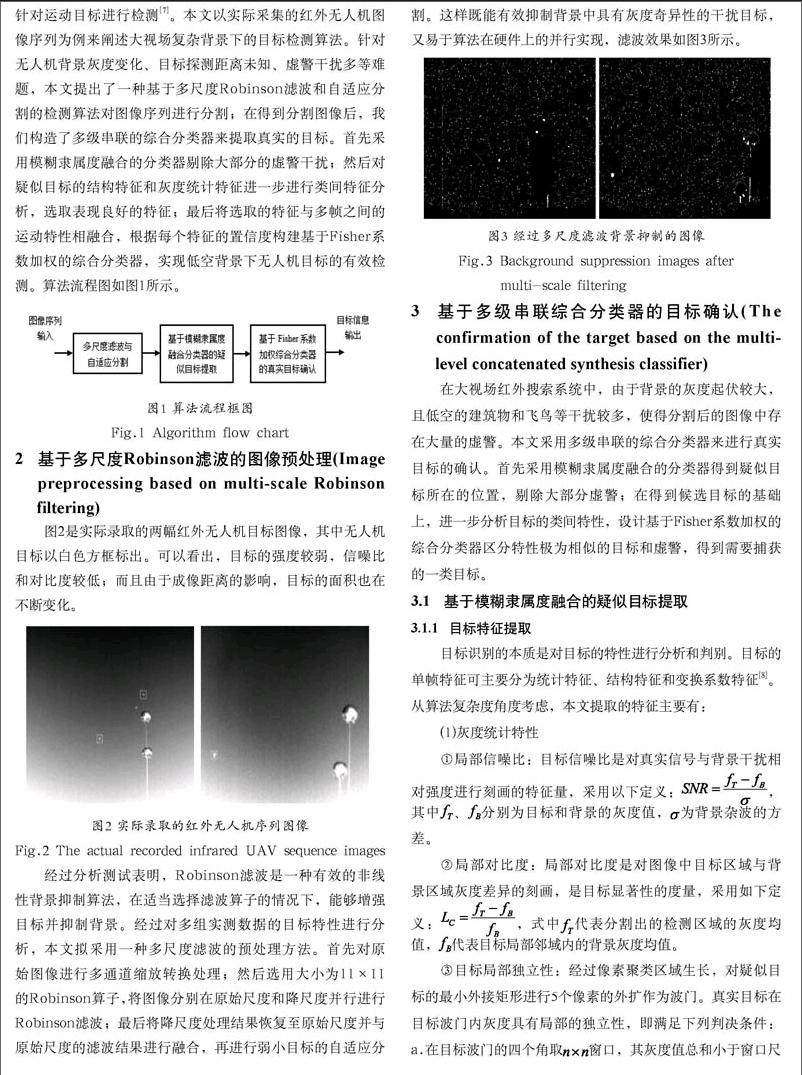
图2是实际录取的两幅红外无人机目标图像,其中无人机目标以白色方框标出。可以看出,目标的强度较弱,信噪比和对比度较低;而且由于成像距离的影响,目标的面积也在不断变化。
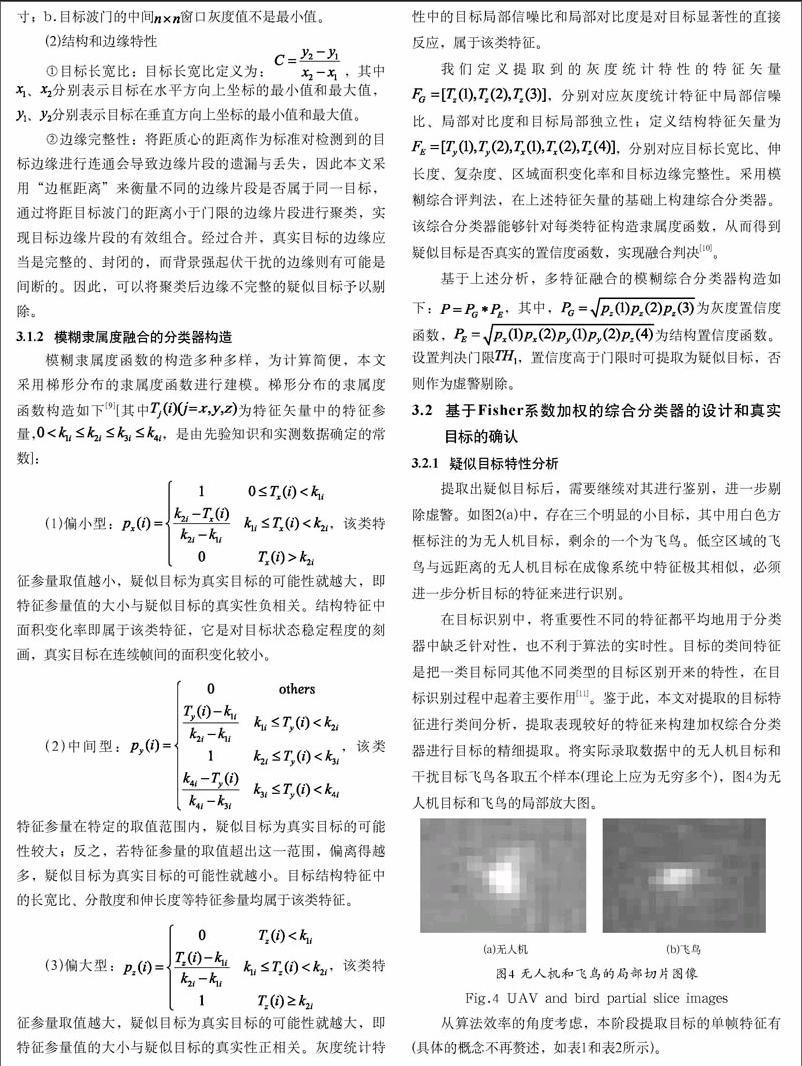
经过分析测试表明,Robinson滤波是一种有效的非线性背景抑制算法,在适当选择滤波算子的情况下,能够增强目标并抑制背景。经过对多组实测数据的目标特性进行分析,本文拟采用一种多尺度滤波的预处理方法。首先对原始图像进行多通道缩放转换处理;然后选用大小为11×11的Robinson算子,将图像分别在原始尺度和降尺度并行进行Robinson滤波;最后將降尺度处理结果恢复至原始尺度并与原始尺度的滤波结果进行融合,再进行弱小目标的自适应分割。这样既能有效抑制背景中具有灰度奇异性的干扰目标,又易于算法在硬件上的并行实现,滤波效果如图3所示。
3 基于多级串联综合分类器的目标确认(The
confirmation of the target based on the multi-
level concatenated synthesis classifier)
在大视场红外搜索系统中,由于背景的灰度起伏较大,且低空的建筑物和飞鸟等干扰较多,使得分割后的图像中存在大量的虚警。本文采用多级串联的综合分类器来进行真实目标的确认。首先采用模糊隶属度融合的分类器得到疑似目标所在的位置,剔除大部分虚警;在得到候选目标的基础上,进一步分析目标的类间特性,设计基于Fisher系数加权的综合分类器区分特性极为相似的目标和虚警,得到需要捕获的一类目标。
3.1 基于模糊隶属度融合的疑似目标提取
3.1.1 目标特征提取
目标识别的本质是对目标的特性进行分析和判别。目标的单帧特征可主要分为统计特征、结构特征和变换系数特征[8]。从算法复杂度角度考虑,本文提取的特征主要有:
(1)灰度统计特性
①局部信噪比:目标信噪比是对真实信号与背景干扰相对强度进行刻画的特征量,采用以下定义:,其中、分别为目标和背景的灰度值,为背景杂波的方差。
②局部对比度:局部对比度是对图像中目标区域与背景区域灰度差异的刻画,是目标显著性的度量,采用如下定义:,式中代表分割出的检测区域的灰度均值,代表目标局部邻域内的背景灰度均值。
③目标局部独立性:经过像素聚类区域生长,对疑似目标的最小外接矩形进行5个像素的外扩作为波门。真实目标在目标波门内灰度具有局部的独立性,即满足下列判决条件:a.在目标波门的四个角取窗口,其灰度值总和小于窗口尺寸;b.目标波门的中间窗口灰度值不是最小值。
(2)结构和边缘特性
①目标长宽比:目标长宽比定义为:,其中、分别表示目标在水平方向上坐标的最小值和最大值,
、分别表示目标在垂直方向上坐标的最小值和最大值。
②边缘完整性:将距质心的距离作为标准对检测到的目标边缘进行连通会导致边缘片段的遗漏与丢失,因此本文采用“边框距离”来衡量不同的边缘片段是否属于同一目标,通过将距目标波门的距离小于门限的边缘片段进行聚类,实现目标边缘片段的有效组合。经过合并,真实目标的边缘应当是完整的、封闭的,而背景强起伏干扰的边缘则有可能是间断的。因此,可以将聚类后边缘不完整的疑似目标予以剔除。
3.1.2 模糊隶属度融合的分类器构造
模糊隶属度函数的构造多种多样,为计算简便,本文采用梯形分布的隶属度函数进行建模。梯形分布的隶属度函数构造如下[9][其中为特征矢量中的特征参量,,是由先验知识和实测数据确定的常数]:
(1)偏小型:,该类特征参量取值越小,疑似目标为真实目标的可能性就越大,即特征参量值的大小与疑似目标的真实性负相关。结构特征中面积变化率即属于该类特征,它是对目标状态稳定程度的刻画,真实目标在连续帧间的面积变化较小。
(2)中间型:,该类特征参量在特定的取值范围内,疑似目标为真实目标的可能性较大;反之,若特征参量的取值超出这一范围,偏离得越多,疑似目标为真实目标的可能性就越小。目标结构特征中的长宽比、分散度和伸长度等特征参量均属于该类特征。
(3)偏大型:,该类特征参量取值越大,疑似目标为真实目标的可能性就越大,即特征参量值的大小与疑似目标的真实性正相关。灰度统计特性中的目标局部信噪比和局部对比度是对目标显著性的直接反应,属于该类特征。
我们定义提取到的灰度统计特性的特征矢量,分别对应灰度统计特征中局部信噪比、局部对比度和目标局部独立性;定义结构特征矢量为,分别对应目标长宽比、伸长度、复杂度、区域面积变化率和目标边缘完整性。采用模糊综合评判法,在上述特征矢量的基础上构建综合分类器。该综合分类器能够针对每类特征构造隶属度函数,从而得到疑似目标是否真实的置信度函数,实现融合判决[10]。
基于上述分析,多特征融合的模糊综合分类器构造如下:,其中,为灰度置信度函数,为结构置信度函数。设置判决门限,置信度高于门限时可提取为疑似目标,否则作为虚警剔除。
3.2 基于Fisher系数加权的综合分类器的设计和真实
目标的确认
3.2.1 疑似目标特性分析
提取出疑似目标后,需要继续对其进行鉴别,进一步剔除虚警。如图2(a)中,存在三个明显的小目标,其中用白色方框标注的为无人机目标,剩余的一个为飞鸟。低空区域的飞鸟与远距离的无人机目标在成像系统中特征极其相似,必须进一步分析目标的特征来进行识别。endprint
在目标识别中,将重要性不同的特征都平均地用于分类器中缺乏针对性,也不利于算法的实时性。目标的类间特征是把一类目标同其他不同类型的目标区别开来的特性,在目标识别过程中起着主要作用[11]。鉴于此,本文对提取的目标特征进行类间分析,提取表现较好的特征来构建加权综合分类器进行目标的精细提取。将实际录取数据中的无人机目标和干扰目标飞鸟各取五个样本(理论上应为无穷多个),图4为无人机目标和飞鸟的局部放大图。
从算法效率的角度考虑,本阶段提取目标的单帧特征有(具体的概念不再赘述,如表1和表2所示)。
(1)结构特征:目标面积;目标波门面积;目标波门长度;目标波门宽度;目标波门长宽比。
(2)统计特征:目标局部信杂比;目标局部对比度;全局信杂比;全局对比度;峰值信杂比;峰值对比度;峰全信杂比;峰全对比度。
圖像的单帧特征有时并不足以完成目标的确认。当遇到背景复杂的图像时,目标的信噪比和对比度都比较低,这时利用单帧图像的特征检测容易出现虚警,所以需要利用图像序列的特征来综合判断。运动目标会在图像序列中呈现出稳定的航迹,而虚假目标如噪声则无规律性。可以通过记录序列图像中目标的位置来判断疑似目标的真实性。
对当前检测的目标建立航迹,如果目标已经存在航迹,则继续记录目标航迹。建立准则来判断目标的运动特征的置信度[12]:①如果目标的航迹置信度,则判断其为真实航迹;②如果目标的航迹置信度,或丢失目标的帧数大于,则判断其为虚假航迹并删除候选目标;③其他情况暂时无法判断,继续记录航迹观察。其中表示已确认关联的帧数与记录航迹总帧数的比值,表示允许丢失帧数的最大值。
3.2.2 基于Fisher系数加权的综合分类器
类间特征作为区分目标的判据,不同目标的类间特征应具有较大差异[11]。我们选择Fisher判据来表示不同特征在区分不同类目标时作用的大小。假设对于特征A,不同类目标表示为:,则两类目标关于特征A的Fisher比率定义为:。其中、分别为、关于特征A的平均值,、为它们关于特征A的方差。如果的值较大,则说明特征A在区分这两类目标时的作用较大;否则特征A不应作为区分两类目标的特征。
上述单帧特征的Fisher比率值如表3所示。依据判决准则,本文选取对无人机目标和虚警具有较高区分度的特征量:目标面积、目标波门面积、目标波门长度、目标波门长宽比、目标全局信杂比和目标全局对比度,并基于这些特征参数构造加权分类器。
由于候选目标的特性比较相似,都在各自的中心值附近波动,因此将真实目标和虚警特征矢量的隶属度均用y类隶属度表示。将目标的结构特征包括目标面积、目标波门面积、目标波门长度与目标波门长宽比表示为;目标的灰度统计特征包括目标全局信杂比和目标全局对比度表示为;目标的运动特征表示为。根据上一节的隶属度函数,单帧目标特征量对应的隶属度为,本文根据器对目标的的区分度即Fisher比率对其赋予其相应的分值,总分为1分(即);而目标的运动特征置信度为,由于本次实验中的无人机和飞鸟均为运动目标,静止的目标一定是虚警,因此它具有一票否决权。疑似目标最终的置信度为:。设置门限,根据目标的置信度得分
,来判定目标的真实性,实现目标的精细检测。
4 实验结果分析(Analysis of results)
采用实际录取的无人机目标的图像序列对本文算法进行检测,如图5所示。其中,(a)(d)为不同尺度无人机目标的原始图像;(b)(e)为模糊隶属度融合分类后的初步检测结果;(c)(f)为最终加权综合分类器的检测结果,图(c)中与真实目标极其相似的飞鸟已作为虚警剔除。
实际应用中,漏检率与虚警率是衡量算法性能的两个重要指标。因此,本文以这两个指标和最终是否正确识别真实目标对算法的有效性进行进一步分析。通过五组实测图像的验证(表4),证明本文提出的目标识别算法能够进行正确的航迹关联,并最终实现对虚警的剔除和对真实目标的确认。
5 结论(Conclusion)
针对大视场红外搜索中的无人机目标识别问题,本文提出了一种基于特征融合的多级综合分类器的无人机目标检测方法。对检测到的目标进行由粗到精的分层次分类与虚警剔除,在虚警剔除的后期对无人机目标和飞鸟的特征进行了分析和选择,来指导和训练加权综合分类器,以实现目标识别。多层综合分类器既满足了序列图像处理实时性需求,又避免了根据单一特征参量进行判决导致分类性能的降低,可以在复杂背景下有效排除虚警干扰。该算法较好地解决了目标强度弱和目标尺寸变化带来的检测问题,对低空背景下弱小目标的检测和跟踪具有一定意义。
参考文献(References)
[1] Yu Duan,Minghui Li,Zhaodong Niu,et al.A Star Pattern Recognition Algorithm for cameras with Large FOV [J].Journal of Modern Optics,2017,10(2):236-241.
[2] Songlin LIU,Gang SUN,Zhaodong NIU,et al.Robust rigid coherent point drift algorithm based on outlier suppression and its application in image matching [J]. Journal of Applied Remote Sensing,2015,9:1-16.
[3] Gang Sun,Songlin Liu,Weihua Wang,et al.Dynamic Range Compression and Detail Enhancement Algorithm for Infrared Image[J]. Applied Optics,2014,53(26):6013-6029.endprint
[4] 王玲玲,辛云宏.基于形态学与遗传粒子滤波器的红外小目标检测与跟踪算法[J].光子学报,2013,42(7):849-856.
[5] 侯旺,孙晓亮,尚洋,等.红外弱小目标检测技术研究现状与发展趋势[J].红外技术,2015,37(1):1-9.
[6] 白俊奇.基于最大类间方差法的红外目标检测方法[J].指挥信息系统与技术,2017,8(2):52-53.
[7] 毋亚北.红外跟踪系统空目标检测技术研究[D].光子学报.长沙:国防科技大学,2012:3-5.
[8] 王卫华,李志军,何艳,等.一种基于兴趣区提取的红外搜索系统目标实时检测算法[J].中国激光,2012,39(11):1-5.
[9] 孙即祥.现代模式识别[M].长沙:国防科技大学出版社.2003:248-249.
[10] 孙刚.大视场红外搜索系统目标检测关键技术研究[D].长沙:国防科学技术大学,2015:110-111.
[11] 李军梅,胡以华,蔡晓春,等.两类特征在红外目标识别中的应用[J].激光与红外,2005,35(3):196-198.
[12] Qiwei Dai,Weihua Wang,Zengping Chen.Infrared Target Detection and False Alarm Elimination Based On Multi Feature Fusion Decision Progress in Electromagnetics Research Symposium(PIERS),August 8-11,Shanghai,China,2016:2719-2723.
作者簡介:
王培早(1993-),女,硕士生.研究领域:红外图像处理与自动目标识别.
王卫华(1980-),男,博士,副教授.研究领域:红外图像处理与信号处理,自动目标识别.
王海松(1991-),男,硕士生.研究领域:雷达信号处理与波形产生.
陈曾平(1967-),男,博士,教授.研究领域:空间目标雷达成像与识别,高速数据采集,存储与实时处理技术,射频全数字阵列雷达.endprint