
基于信息检测融合的列车运行研究
2018-01-26 04:58:19天津市地下铁道运营有限公司
电子世界 2018年1期
天津市地下铁道运营有限公司 宋 宁
1.高速列车运行信息分析
通常高速列车运行过程中信息量大,所以分析都比较复杂。主要包括:列车的速度、位置、列车的外形及动力等基本参数、线路的基本数据以及行车外部环境条件等六大类。
2.列控信息融合研究
为全面分析列控系统的集成性能,充分考虑各种信息,按信息抽象层次,将列车的控制信息为两层三级进行融合,方便在不同层面对列控信息进行融合处理,实现信息融合的全面性。
2.1 卡尔曼滤波算法的运行信息融合模型
根据常见离散系统的特性,列车运行过程的数学模型为:
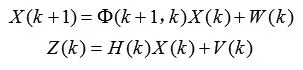
模型中的参数k是采样时间,X(k)是该时间下的状态参数,Z(k)为系统模型的观测参数,W(k)是随机噪声参数,V(k)是观测噪声参数,Φ(k+1,k)为系统的状态转移矩阵,H(k)是系统的测量矩阵。
2.2 模型改进与仿真分析
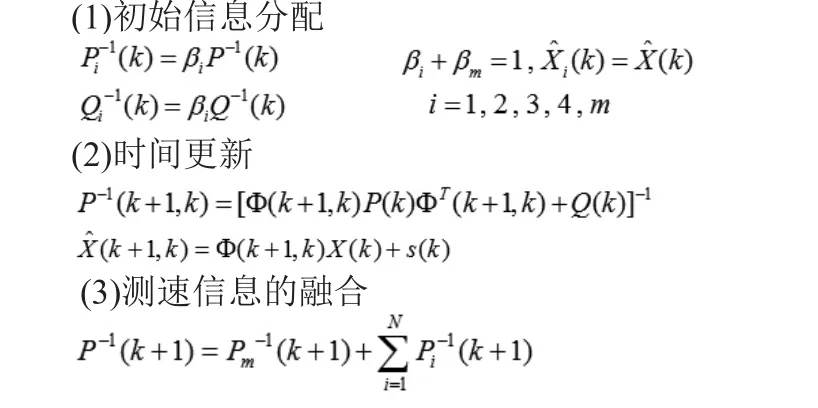
卡尔曼滤波算法结合自适应的基本要求是需要在各子滤波器中增加传感器的噪声估计,而且要在主滤波器中增加系统噪声估计,对模型的噪声以及测量噪声的统计特性进行估计和修正,达到抑制滤波的发散、降低模型的误差,最终达到提高滤波精度的目的。算法过程如下:
3.仿真分析
仿真软件使用MATLAB仿真软件,对改进前后的模型算法和改进后的模型算法进行仿真对比分析。
根据图1中能够反映出当在不同路测速传感器进行单独各自测算时,所监测到的高速列车的速度曲线出现了显著的波动,反而,通过联合滤波处理后的曲线波动明显有所改善,并且基本呈现出稳定平滑渐变的态势。利用图2,我们可以发现,通过使用改进后的自适应联合卡尔曼滤波算法所计算出的融合效果图,相比联合卡尔曼滤波的融合结果,通过改进后的自适应滤波结果更加稳定,精度也更加高。所以证实了自适应算法使联合卡尔曼滤波算法的优越性,这种改进后的滤波方式可以有效地消除噪声带来地干扰从而将测速精度大大地提高,重要的是系统地稳定性得到了有效地改善。
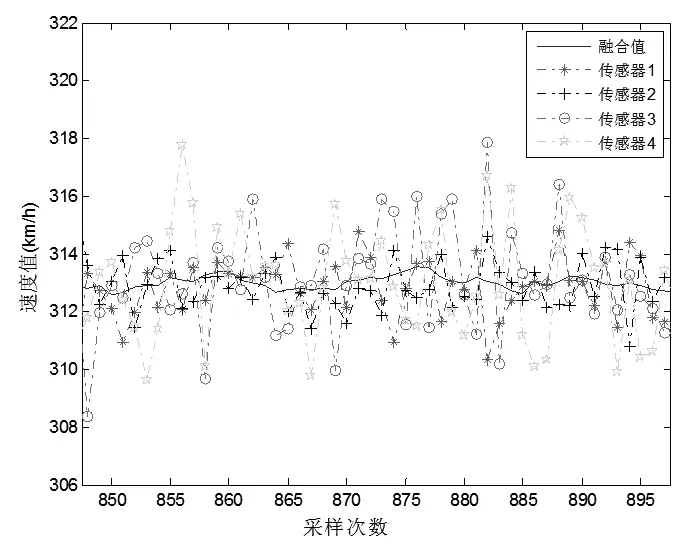
图1 常见卡尔曼滤波仿真图
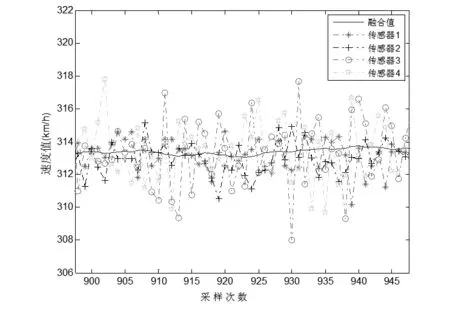
图2 卡尔曼滤波结合自适应仿真图
4.融合性能分析
为了能够验证模型的融合效果,现以行车许可模型为例,在车地信息传输部分加入故障模块,模拟通道失效,错误数据进入系统的过程。
利用故障注入子模块对系统进行故障注入分析(见图3),采用不同的故障注入系数,通过多次仿真分析,分别采集了融合处理前后不同节点的错误信息,并且将采集的数据进行归类统计,计算出统计的加权平均值,计算出了最终的实验数据统计结果。
通过图4显示,数据在未进行融合处理前,会出现较多次数的错误信息,并且错误发生的频次将随着故障注入率的增加而变大。但是利用了融合数据分析处理后,错误信息发生率有了明显地改善。因此证明了,当车载系统开始计算速度监控曲线前,将有效的信息通过改进后的融合处理之后可以有效地使发生错误信息的频次进行很好地控制,因此,车载系统中控制计算层可以利用信息融合方法以达到提高高速列车控制系统的可靠性与安全性。
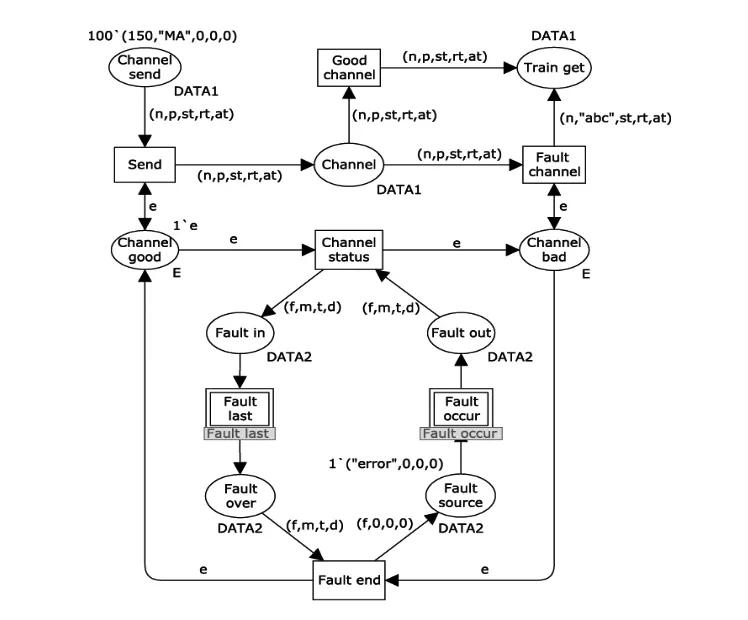
图3 故障注入模型
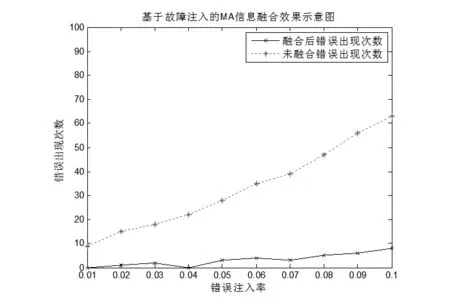
图4 故障注入效果示意图
5.结论
为了在高速列车计算系统中提高列车运行信息的可靠性与安全性,本文旨在重点分析了测速数据、行车许可命令、线路信息以及临时限速信息的多项融合处理方案,车载设备层分别使用不同的分析法对数据信息采取融合处理,并进行了仿真验证,建立了列控系统总体融合模型,分析了测速信息融合处理结构,创新建立出了一套基于联合卡尔曼滤波算法的高速列车测速信息融合模型。并且模型通过使用自适应卡尔曼滤波算法对进行改进后,仿真验证了模型的正确性和改进方法的有效性。
[1]唐松柏,黄问盈.我国高速列车速度分级[J].中国铁道科学,2006,27(2):77-82.
[2]林瑜筠,谭丽,涂序跃等.高速铁路信号技术[M].北京:中国铁道出版社,2012:222-274,372-401.
[3]何友,王国红,关欣.信息融合理论及应用[M].北京:电子工业出版社,2010:2-68,91-177.
[4]International Conference on Control[C].UK:Swansea,IEEE,1998:969-974.
猜你喜欢
军民两用技术与产品(2022年4期)2022-06-28 02:03:00
铁道通信信号(2020年1期)2020-09-21 08:55:16
成都信息工程大学学报(2019年5期)2019-05-21 00:46:10
测控技术(2018年7期)2018-12-09 08:58:10
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
铁道通信信号(2016年8期)2016-06-01 12:10:21
铁道通信信号(2016年1期)2016-06-01 12:10:17
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
中国铁道科学(2015年6期)2015-06-21 06:54:54
