
一种基于多传感器融合的冗余测速测距系统设计
2018-01-26 08:11孟凡江尹逊政
铁路计算机应用 2018年1期
孟凡江, 尹逊政
(1.广州地铁集团有限公司,广州 510000;2.中国铁道科学研究院 通信信号研究所,北京 100081)
列车控制系统是城市轨道交通保障行车安全、提高运输效率和运营管理水平的重要设备,其中测速测距系统是列车控制系统中的关键组成部分,其主要任务是向列车控制系统提供实时的速度和位移信息。测速测距系统向ATP系统提供的列车速度和位移信息,是ATP系统进行列车速度监督,列车位置管理以及列车状态监督的基础数据和重要依据,在保证列车行车安全并提高列车运行效率上起着至关重要的作用[1]。
1 系统设计需求与技术背景
1.1 设计需求
列车的测速测距系统必须适应其闭塞方式[2]。传统的基于固定闭塞的列车控制系统对测距精度要求相对较低[3],随着3C(Communication,Computer,Control)技术的发展,移动闭塞替代原来的固定闭塞成为城市轨道交通信号系统的主流闭塞方式[4],基于通信的列车控制(CBTC,Communication Based Train Control)系统所采用的正是移动闭塞技术。CBTC制式下的列车运行速度高,列车追踪间隔小,列车运行控制的自动化程度高,传统的测速测距方式不能满足CBTC系统对列车速度和位置信息的需求。
目前,主流的测速测距系统普遍采用了多传感器融合的方式[5](测速电机+测速雷达或测速电机+加速度计)。但是受限于测速测距系统架构和列车安装条件,关于测速测距系统的研究着重于测速测距算法,没有从系统的角度给出较为完备的具有冗余功能的测速测距系统设计方案[6-9]。因此,本文从系统的角度提出一种基于多传感器融合的冗余测速测距系统(简称:系统)设计方案。此方案在考虑测速测距系统相关设备可靠性和可用性的基础上,通过设置互为热备的车头和车尾的测速测距设备的切换提高系统的冗余度,能够有效降低因单点故障导致的测速测距系统故障,避免因测速测距系统故障而引起的信号系统故障。
1.2 技术背景
从测量原理划分,现有测速测距传感器主要分为3种:
(1)测速电机。测速电机(如光电式编码器、霍尔传感器等,简称OPG)安装于车轴上,通过测量列车车轴转动的角速度,结合其轮径值计算列车的速度。通过测量车轴转动获取列车速度的方法精确度较高,但由于此种方法不直接测量车体的运动信息,测速电机的测量值会因车轮异常运动(如空转、打滑)以及轮径磨损等因素的影响而产生误差。
(2)雷达。雷达(简称:RD)的测速原理是多普勒效应,通过测量发射波和反射波之间的频差来计算列车的运行速度,再对速度进行积分滤波等处理后推算位移信息。由于雷达是直接测量车体与反射面的相对运动,其测量结果不受车轮异常运动的影响。但是,雷达会受到安装误差、雨雪天气、电磁干扰和车体振动等因素的影响,使其测速测距性能的下降。
(3)惯导传感器。加速度传感器通过测量车体运动惯性变化获得列车的加速度信息,通过对加速度信息进行积分滤波等处理就可以计算出列车的运行速度,再对速度进行积分滤波等处理就能得出位移信息。加速度的测量结果也不受车轮异常运动的影响,但受车体振动和安装误差的影响较大。
2 系统设计方案
2.1 硬件架构设计
系统由两套互为热备的测速测距设备组成,分别安装于列车两端。每套测速测距设备由中央主控单元(CPU)、速度传感器信息处理单元(SPU)、应答器信息处理单元(BPU)、BPU天线(BTM)、轮轴速度传感器(测速电机)、雷达测速传感器(雷达)、人机显示界面(DMI)构成。系统结构如图1所示。
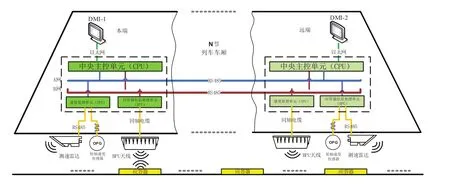
图1 系统结构示意图
CPU负责完成速度和位置信息的安全处理以及传感器状态的监测。SPU负责完成雷达和测速电机所测量的列车运动状态信息的原始处理。BPU通过与其连接的BPU天线获取地面应答器的信息,根据应答器的报文信息确定列车位置,辅助CPU完成列车精确位置的确定。DMI用于显示测速电机、雷达以及BPU的状态,其通过以太网和CPU连接。CPU通过通信总线分别与两端的SPU和BPU连接。
2.2 工作原理
测速电机将测量到的列车车轴的转动信息以数字信号(方波)的形式发送给SPU,SPU通过硬件接口电路,将其转化为数字脉冲信号。中央处理器通过计算该数字信号的频率和方波个数获取车轮运动的角速度,结合被测车轮的轮径值计算出当前测速电机所测量到的列车速度信息和里程信息。CPU根据从BPU获取的列车精确位置信息校正由SPU计算出的列车位置,减小测速电机与雷达的里程信息处理的累积误差。CPU将得到列车的速度与位置信息和传感器状态信息结果分别发送给列车控制系统的逻辑处理层和DMI。
2.3 系统冗余原理
为避免由单点故障引起的系统故障和功能失效,采用三重安全冗余结构。三重冗余为传感器安全冗余、逻辑运算冗余、头尾设备冗余以及双系冗余。三重安全冗余结构能从数据传输、逻辑运算、设备切换3个层面有效提高系统的可靠性和可用性。
测速传感器安全冗余由中央主控单元的MPU完成。CPU对速度信息中测速电机和测速雷达的速度数据进行对比。如果二者的数据偏离超出了容许范围,中央主控单元将认为当前的传感器组失效。本端中央处理单元将使用远端传感器组的数据进行列车位置和列车速度的计算传感器的安全冗余,杜绝了单个传感器故障情况下车载ATP获取错误速度信息的可能性。
中央主控单元的两个MPU根据速度处理单元发送的数据进行独立的逻辑运算,对两个MPU的计算结果进行对比,若对比不通过,则认为本系中央处理单元故障,中央处理单元切换至备系。
为提高系统可靠性,在本端传感器组故障情况下,中央主控单元可以无缝切换到远端,使用远端速度传感器组数据。本端BPU天线故障的情况下,中央处理单元可以无缝切换到远端,使用远端BPU天线数据。
3 软件设计与实现
本系统采用VxWorks实时嵌入式操作系统。系统应用软件基于标准C语言开发。系统软件从速度信息处理以及里程信息处理两个层面进行设计。
3.1 速度信息处理
测速电机输出的原始信号为与车轴转速成比例的方波信号,其频率和轮轴转速关系满足以下公式:

其中,n为转速(r/min),p为每转输出的方波个数。
角速度与转速的关系满足:

由式(1)、(2)可得:

角速度与线速度的关系满足:

由式(3)、(4)可得:

其中,p为每转输出的方波个数,f为方波频率(Hz),D为轮径值(m),D=2r。
测速电机加速度值的计算公式如下:

其中,v2为本周期速度值, v1为上周期速度值,T为速度的计算周期。
在每个测速电机信息处理周期,SPU计算每个通道的速度值和加速度值,当合法性校核通过,将各通道的速度值和加速度值取平均值作为SPU输出给CPU的测速电机速度信息。
由于测速电机测量的是车轴的速度信息,在车轮发生异常运动的情况下,并不能真实反映列车的速度,因此还需进行空转打滑的判断:
(1)当加速度绝对值|aOPG|大于给定阈值Aα时,判断当前被测车轴发生空转打滑。
(2)当加速度绝对值|aOPG|≤Aα且当前车轴传感器速度VOPG相对于雷达速度VRD的滑移率绝对值小于给定阈值Rα时,判断当前被测车轴空转打滑结束。
CPU从SPU获得原始的列车速度信息,主要包括以下内容:
(1)测速电机的速度值vOPG以及空转打滑信息;(2)雷达的速度值vRD。
判断当前传感器是否处于异常状态,如果有传感器出现异常状态,则将列车运动状态信息来源切换到尾端的SPU:
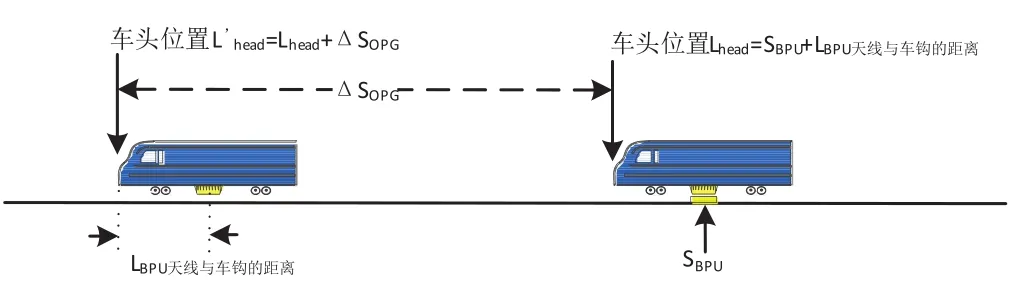
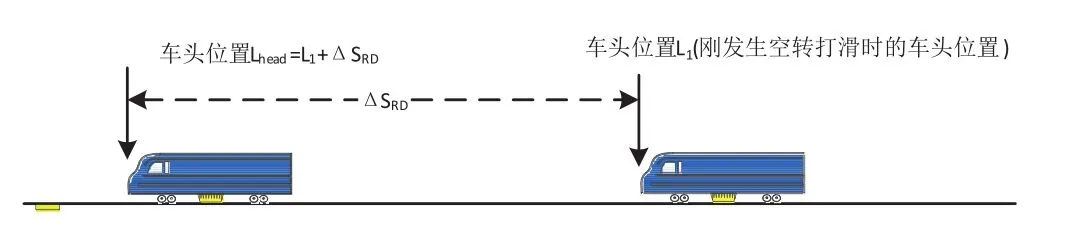
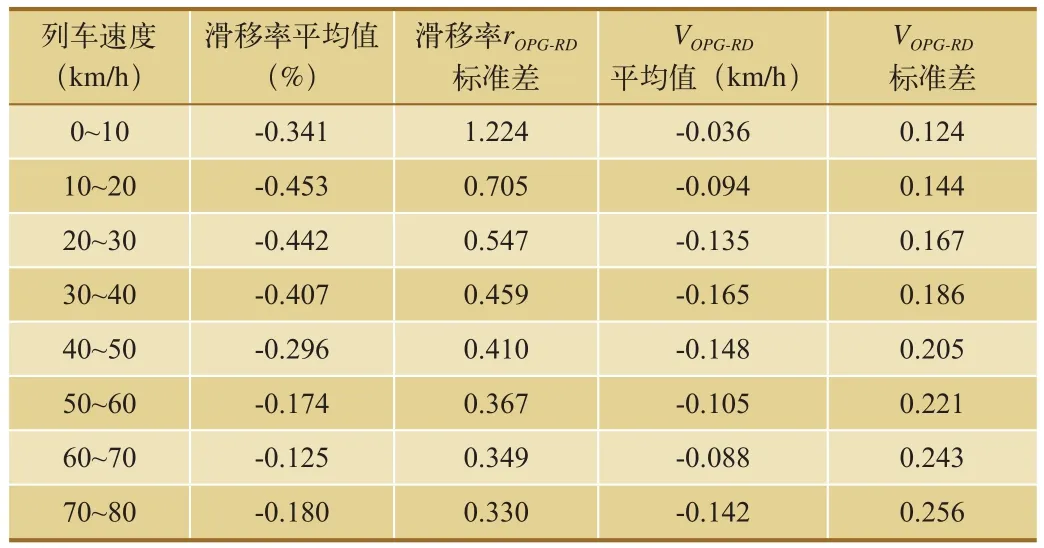
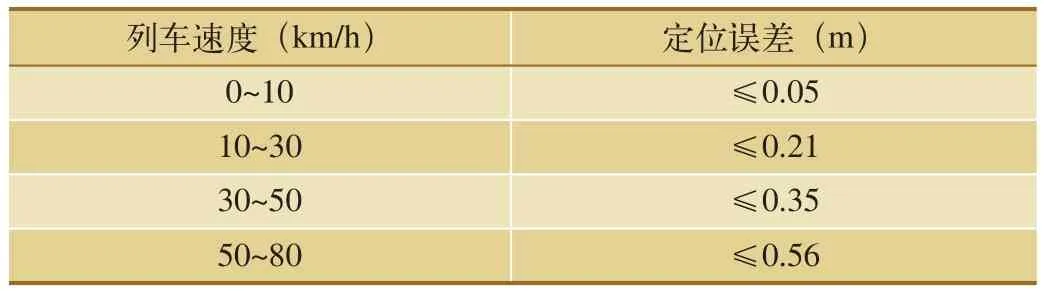
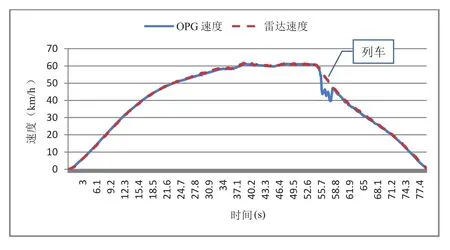
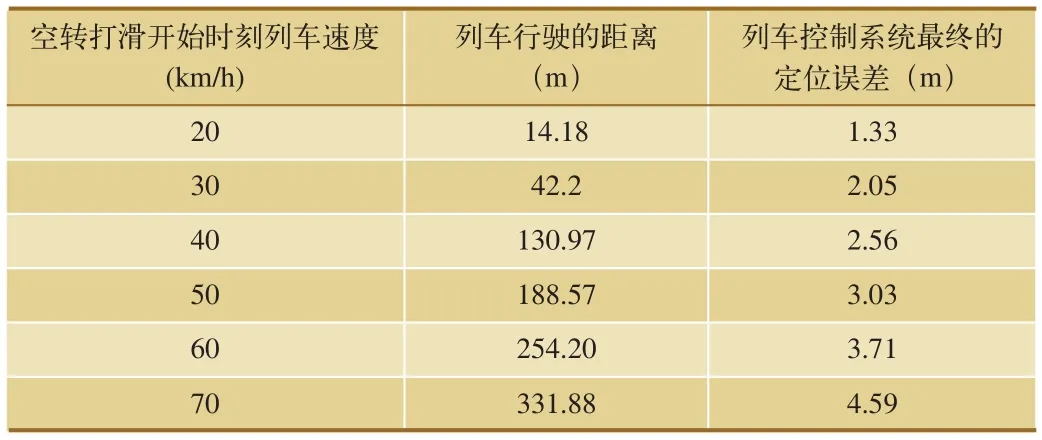
(1)如果传感器均处于正常工作状态,且车轮未发生空转打滑,则进行滑移率的合法性判断:如果vOPG相对于vRD的滑移率绝对值|rOPG–RD| (2)如果传感器均处于正常工作状态,且车轮发生空转打滑,则取vRD作为速度信息的取信值。 测速电机输出的方波个数与转动圈数成线性比例,且每转输出的方波个数为固定值,则测速电机里程值s可采用以下公式计算: 其中,p为测速电机每转动一圈输出的方波个数,n为SPU所计算的该通道方波信号的个数。 在每个测速电机信息处理周期,SPU按公式(7)计算每个通道的里程值,当合法性校核通过,将各通道的里程值取平均值作为SPU输出给CPU的测速电机里程信息。 CPU从SPU获得原始的列车速度信息,主要包括以下内容: (1)测速电机的里程值SOPG以及空转打滑信息; (2)雷达的里程值SRD; (3)BPU的定位信息。 CPU在获得上述信息后,则按以下步骤进行里程信息的安全处理: (1)判断当前传感器是否处于异常状态,如果有传感器出现异常状态,则将列车运动状态信息来源切换到另一端的SPU; (2)判断当前BPU是否处于异常状态,如果BPU出现异常状态,则将BPU信息来源切换到另一端的BPU; (3)如果当前传感器未出现异常,且未出现空转打滑则采用SOPG更新里程信息,列车车头的实际位置计算公式如下: 其中,LBPU表示BPU天线到本端列车车钩的距离;SBPU表示当前应答器在电子地图中映射的位置;ΔSOPG表示未发生空转打滑时,车轴速度传感器在经过应答器后测量到的列车相对里程。 定位原理如图2所示。 图2 列车定位原理(未发生空转打滑时) 如果出现空转打滑,则采用雷达里程测速更新里程信息,定位原理如图3所示。 图3 列车定位原理(发生空转打滑时) 为了验证本文提出技术方案的可行性,在中国铁道科学研究院城市轨道交通试验线进行了实车现场测试。 列车在不同速度条件下匀速运行,用记录软件实时记录SPU输出的速度信息,按照选取100组测速电机与雷达测速数据/速度等级,进行统计分析。测试结果如表1所示。 表1 列车速度测量差值统计 试验表明,在正常运行条件下,速度传感器和雷达测速差值与离散度与列车速度成正比关系,但vOPG相对于vRD的滑移率rOPG-RD均满足小于3%的系统设计指标。 使列车在不同速度条件下通过应答器,然后使列车在下一个应答器前停下,记录车载系统测量的列车位置和列车的实际位置。测试结果如表2所示,满足误差要求(小于5‰)。 表2 列车定位误差统计 通过在钢轨上涂抹润滑油的方式来降低钢轨与车轮之间的黏着系数,当列车经过涂有润滑油的钢轨区域时,按下列车的紧急停车按钮,此时列车会施加最大制动力,从而导致车轮出现打滑。典型的滑行曲线和测试结果如图4和表3所示。 试验表明,在不同运行速度等级下,列车定位误差均小于IEEE1474-1《以通信为基础的列车控制(CBTC) 性能和功能要求》[9]规范中定义的±5 m的技术指标, 满足要求。 图4 列车打滑测速曲线 表3 列车打滑工况测距定位误差统计 对测速电机故障、测速雷达故障、SPU故障等情况进行测试,均可无缝切换到冗余的测速测距单元工作。 本文提出的技术方案在不增加传感器数量的前提下,通过将列车两端的传感器信息共享,使得列车在出现单一传感器故障的情况下也能正常运行。结合测速电机与测速雷达多传感器融合计算技术,克服了单个传感器固有的测量缺陷。为城市轨道交通列车控制系统提供了一套高可靠性、高可用性的列车测速测距方案。 [1] 刘培顶,陈荣武. 基于速度传感器的测速定位算法研究[J].铁路计算机应用 ,2016,25(2):50-54. [2]王灵丽.基于CBTC的地铁列车组合定位技术研究[D]. 成都:西南交通大学,2014. [3]徐 炜.城市轨道交通列车定位系统[J]. 铁路通信信号工程技术,2009,6(2):41-44. [4]田志鹏.移动自动闭塞的列车追踪控制优化研究[D].兰州:兰州交通大学,2016. [5] A.Mirabadi,N.Mort,,F.Schmid.Application of Sensor Fusion to Railway Systems[C]//Proceedings of the 1996 IEEE/SICE/RSJ International Conference on Multisensor Fusion and Intergration for Intelligent Systems,1996:185-192. [6]张 冲.城轨交通车载控制器定位技术的研究[D].成都:西南交通大学,2011. [7]张武娟.雷达测速在列车运行中的研究与应用[D]. 长沙:中南大学,2008. [8]乔 超,唐慧佳.列车里程计定位方法的研究[J].兰州铁道学院学报,2003,22(3):116-119. [9]陆德彪.列车组合定位系统可信性研究[D].北京:北京交通大学,2010.3.2 里程信息处理


4 测试与验证
4.1 速度信息测量验证
4.2 列车定位误差验证
4.3 打滑工况测距验证
4.4 冗余切换测试
5 结束语
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车工程师(2021年11期)2021-12-21
今日农业(2021年7期)2021-11-27
科学(2020年3期)2020-01-06
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
车迷(2017年12期)2018-01-18
电子制作(2017年7期)2017-06-05
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07
