77GHz毫米波雷达传感器技术研究
2018-01-25 07:48崔春宽何少斌李东浩王崇阳刘奎
汽车实用技术 2018年1期
崔春宽,何少斌,李东浩,王崇阳,刘奎
(安徽江淮汽车集团股份有限公司技术中心,汽车智能网联技术安徽省重点实验室,安徽 合肥 230601)
前言
汽车主、被动安全逐步成为法规要求项,主动安全产品越来越受到消费者关注,智能化、舒适性电气功能越来越多的成为用户期待的整车功能。智能辅助驾驶系统是当前国家和行业层面重点发展的对象,国家已经制定了相应的发展战略支持,并鼓励各主机厂研究智能辅助驾驶技术。77GHz毫米波雷达作为实现汽车主动安全主要的传感器,将会被越来越多的应用到整车上,是2025年实现高度自动驾驶的关键传感器,通过77GHz毫米波雷达,可以实现前碰撞预警、自动紧急制动、自适应巡航功能,大大提高整车驾驶主、被动安全性[1]。目前汽车行业内开发的基于77GHz毫米波雷达的防撞预警、自适应巡航功能的车型越来越多,且有很多车型已量产,如新高尔夫、博瑞等车型。
1 毫米波雷达系统工作原理
毫米波雷达通过微带阵列天线向外发射毫米波(调频连续波),接收目标反射信号,处理后获取汽车车身周围的物理环境信息(如汽车与其他物体之间的相对距离、相对速度、方位角度等),然后根据所探知的物体信息进行识别和目标追踪,进而结合车身动态信息进行数据处理。经合理决策后,以声、光及触觉等多种方式警告驾驶员,或及时对汽车做出主动干预,减少事故发生几率[2]。工作原理图如图1所示。
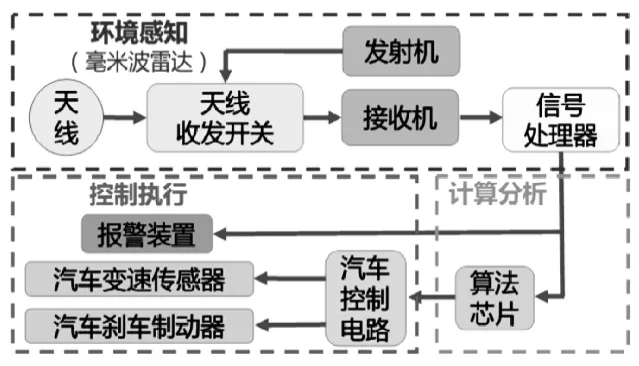
图1 毫米波雷达系统工作原理图
1.1 毫米波雷达测距、测速原理
毫米波雷达通过天线向外发射调频连续波(三角波),接收目标反射信号,与本频发射频率混频出中频信号IF,对中频信号IF处理,从而获得目标距离和速度信息。反射波与发射波形状相同:存在一个时间差△t,还包括一个多普勒频移fd。雷达发射信号与反射信号如图 2所示,雷达识别的运动目标与静止目标的反射信号如图3所示。
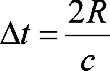
根据距离公式,求出相距目标的距离:
根据多普勒原理,求出相对目标的相对速度:

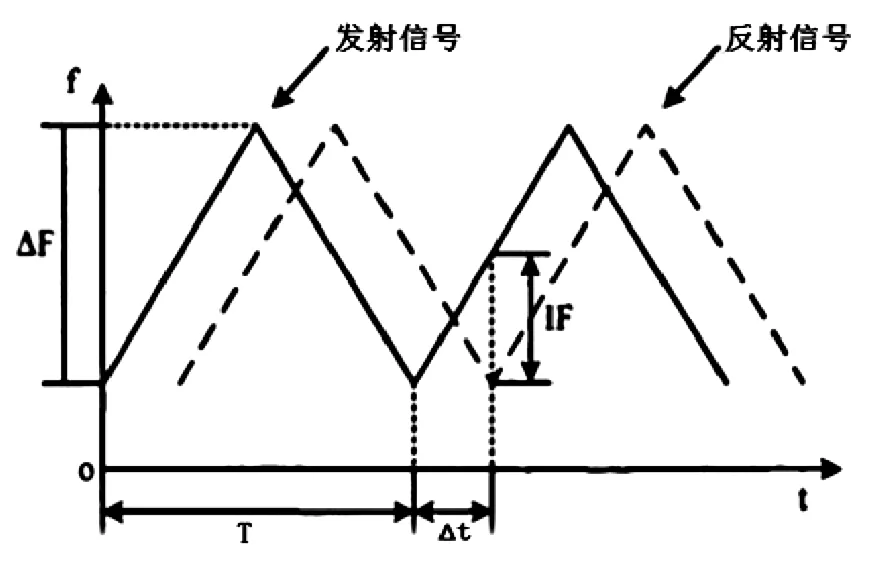
图2 雷达发射信号与反射信号
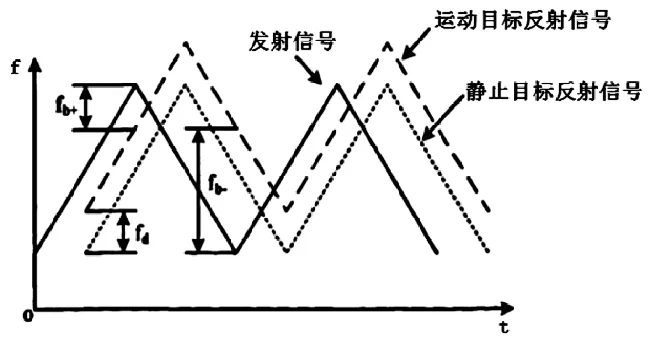
图3 雷达识别的运动目标与静止目标的反射信号
1.2 毫米波雷达测角原理
角度测量是探测“目标与天线中心线的连线”与法线的夹角,用于目标定位,从而获得目标与本车位置信息。天线一般需设置为一发两收,采用比相法来实现测角功能。毫米波雷达测角原理图如图4所示。其中接收天线之间相隔距离为 d,造成回波信号一前一后的到达接收天线,导致两根天线同时接收到的信号在相位上相差一个Δφ,θ为待测角度,经计算得出:
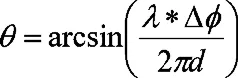
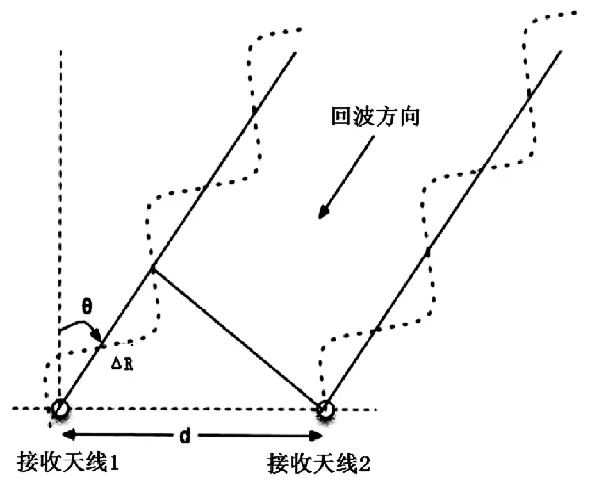
图4 毫米波雷达测角原理图
2 毫米波雷达的硬件介绍
整个汽车行业采用的 77GHz毫米波汽车雷达技术方案是多种多样的,其核心射频芯片主要来源英飞凌、恩智浦/飞思卡尔、意法等公司。其中英飞凌采用多芯片射频系统的毫米波雷达技术,收发通道为 2T/4R,系统特点为:2发 4收,发射模块、接收模块分离,集成度较高,采用该方案来设计77GHz射频前端电路具有一定的灵活性,但由于涉及到较多的控制电路设计,后期的调试工作量较大,目前未对国内开放。飞思卡尔采用多芯片射频系统的毫米波雷达技术,收发通道为2T/3R,系统特点为:2发3收,发射模块、接收模块分离,集成度较高,采用该方案来设计77GHz射频前端电路具有一定的灵活性,但由于涉及到比较多的控制电路设计,后期的调试工作量也较大。意法采用单芯片射频系统的毫米波雷达技术,收发通道为 3T/4R,系统特点:3发 4收,发射模块、接收等模块集成设计,辅以MCU等部分电路可构建雷达系统,集成度高,采用该方案来设计 77GHz射频前端电路内部配置灵活,由于涉及到的控制电路少,后期的调试工作量较少、成本低,目前也已对国内开放。
通过以上的对比分析可以看出,77GHz毫米波雷达开发及应用主要取决于前端射频芯片性能,高频段多芯片方案导致设计、调试复杂,开发难度较大。目前意法 ST集成芯片为核心的架构进行77Ghz毫米波雷达开发,具有集成度高、通道多、性能好以及技术开放程度高,有利于快速开发。
3 毫米波雷达的软件架构
毫米波雷达通过整车的 CAN网络,实现与整车的通信和控制。毫米波雷达通过接收反射回来的雷达波进行数据采集,并将回波信号进行识别与处理,经过内部软件算法运算,识别前方目标,根据车辆当前的行驶状况,毫米波雷达控制器得出相应的决策,进而控制仪表作出相关显示,以及控制车辆完成加速或制动等操作[3]。毫米波雷达的软件架构图如图5所示。
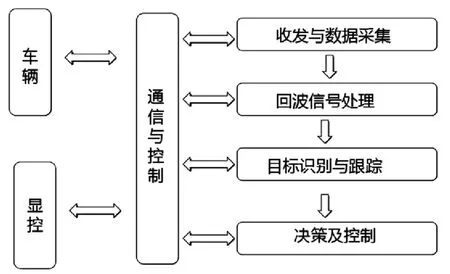
图5 毫米波雷达的软件架构图
3.1 毫米波雷达的目标识别
毫米波雷达的目标识别基本原理是:利用雷达回波中的幅度、相位、频谱和极化等目标特征信息,通过数学上的各种多维空间变换来估算目标的大小、形状等物理特性参数,最后根据大量训练样本所确定的鉴别函数,在分类器中进行识别判决,内容包括目标识别预处理、特征信号提取、特征空间变换、模式分类器及样本学习等模块。其中特征信号提取是指毫米波雷达采集提取其发射的电磁波与目标相互作用产生的各种信息,包括:RCS(雷达散射截面积)以及其他特征参数,常用的特征参数有目标的结构外形特征、目标的动态特征和回波波形特征等;而特征空间变换的目的为:改变原始数据分布结构、压缩特征空间的维数(降低)、去除冗余特征,常用的特征变换技术:K-L变换(去冗余)和Walsh变换(降维)等。毫米波雷达的目标识别原理图如图6所示。
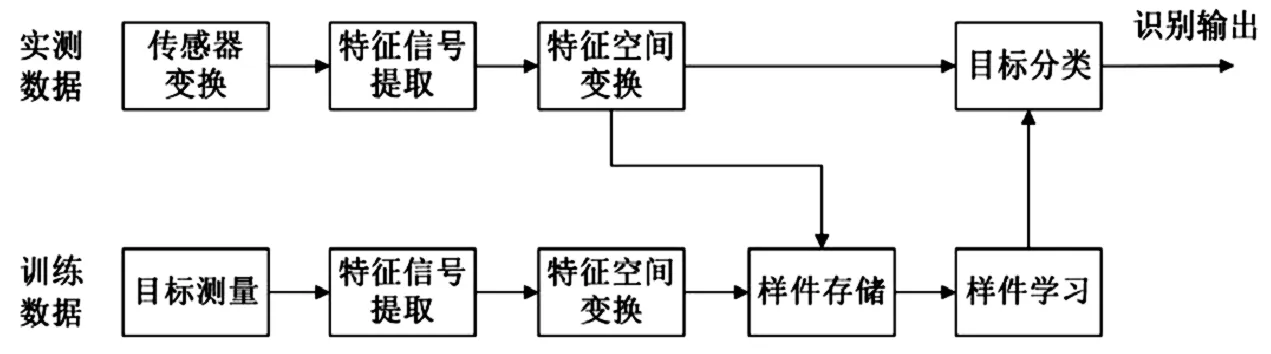
图6 毫米波雷达的目标识别原理图
毫米波雷达的目标识别的方法有两种:基于模板的方法和基于模型的方法。基于模板的方法是指:毫米波雷达直接从目标回波中提取有直观物理意义的特征或目标图像作为模板,通过实测模板与模板库的比较进行分类;基于模型的方法是指:在大量训练样本的基础上,建立目标回波或图像的数学模型,通过比较实测回波特征与模型预测特征进行分类。
3.2 毫米波雷达的目标跟踪
目标跟踪系统有目标信息预处理、目标跟踪处理、目标滤波处理等模块组成。其中目标信息预处理主要包括目标回波的处理、目标检测、点迹凝聚、参数计算等,相关定义如下。
①回波处理:主要包括回波的解调、信号的FFT变换等;
②目标检测:目标的门限检测、虚警率控制处理;
③点迹凝聚:主要对多个回波信号进行重心、质心等计算,估算目标位置;
④参数计算:通过各种处理模型算法计算出目标的位置及运动参数信息。
目标跟踪处理及滤波主要包括目标预测、目标相关、目标滤波等。目标预测是指根据前一时刻的值预测当前时刻的状态;目标相关是指预测信息与存在目标信息的关联度判断参数计算(距离、速度、方位等);目标滤波是指根据测量结果对预测结果进行修正,主要滤波函数为Kalman滤波。
4 毫米波雷达的实车匹配
毫米波雷达在整车上布置有较高的要求,只有满足相关的布置要求,毫米波雷达的功能和性能才能得到更好的保障,表1列举出了毫米波雷达的布置要求。
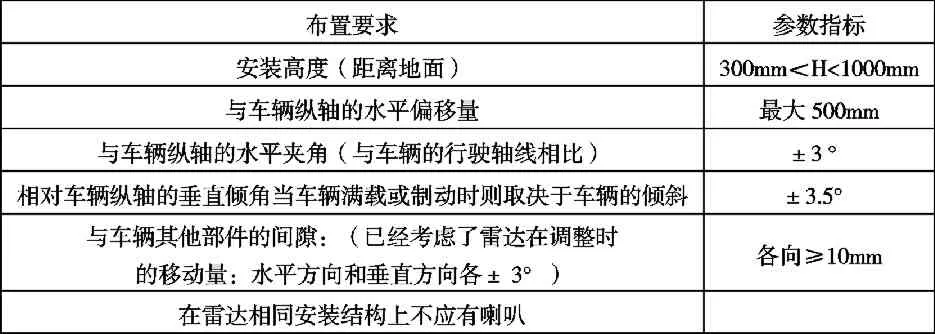
表1 毫米波雷达的布置要求
满足毫米波雷达的整车安装布置只是其实现功能的最基本要求,为确保毫米波雷达能够实现车辆的自动紧急制动或自适应巡航等功能,还需要毫米波雷达与整车完成相关的信号通信。其中毫米波雷达需求的整车信号包含:轮速信号、横摆角速度信号、转向盘转角信号、转向盘角速度信号、ABS/TCS/VDC状态信号、油门踏板信号等[4]。
为实现车辆的自动紧急制动或自适应巡航等功能,除了需要安装毫米波雷达来为车辆提供显示及控制信号,还需要整车其他相关零部件满足相应设计要求。
整车硬件结构方面的设计要求包含:第一,满足基于自适应巡航系统、自动紧急制动系统对ESP(车身稳定系统)在寿命、制动压力建压速度和噪音等要求,①ESP马达低频控制的ECU硬件需要升级为中频控制的ECU,②ESP需要更换半填充设计结构的常开阀过滤器、硬度更高的常开阀底座等硬件;第二,增加自适应巡航功能操作硬件控制开关;第三,对车辆前保险杠造型作设计变动。
整车软件方面的设计要求包含:第一,需要 ESP提供车轮转速、横摆角速度、制动压力等信号给毫米波雷达;第二,需要 EMS(发动机电子控制单元)提供发动机转速信号和油门踏板位置信号等,且必须满足根据毫米波雷达指令及时响应扭矩请求的要求;第三,需要 TCU(变速箱控制单元)提供档位信息;第四,需要仪表增加自适应巡航系统、自动紧急制动系统工作指示灯和报警指示灯,增加相关系统所需的显示信息,第五,在导航上设置相关功能的设置软开关。
5 总结
针对77GHz毫米波雷达广阔运用,分析了其工作原理,得出毫米波雷达测距、测速、测角度的具体计算方法。通过对毫米波雷达的芯片选择对比,得出意法 ST集成芯片在毫米波雷达上有着更开放的技术运用。对于毫米波雷达的软件架构的研究,说明了毫米波雷达的目标识别与目标跟踪的原理。最终通过介绍毫米波雷达的实车匹配,为其实现车辆主动安全系列功能提供了设计思路。
[1] 黄文奎.毫米波汽车防撞雷达的设计与实现[D],中国科学院研究生院,2006.
[2] 徐涛.毫米波汽车防撞雷达实用化研究[D],中国科学院研究生院,2006.
[3] 丁海风.汽车主动防撞预警系统雷达信号处理研究[D],吉林大学,2013.
[4] 王景武,金立生.车辆自适应巡航控制系统控制技术的发展[J],汽车技术,2004.07.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
汽车工程师(2021年12期)2022-01-17
波谱学杂志(2021年1期)2021-03-12
军民两用技术与产品(2021年12期)2021-03-09
科学导报·学术(2019年44期)2019-09-10
航天电子对抗(2019年4期)2019-06-02
祖国(2017年22期)2018-01-02