
RNP AR进近的飞机噪声影响分析
2018-01-24 08:15王维,王震
中国民航大学学报 2017年6期
王 维,王 震
(中国民航大学机场学院,天津 300300)
近年来中国民用航空局大力推广基于性能导航(PBN,performance based navigation)。PBN程序又分为区域导航(RNAV,area navigation)和所需导航(RNP,required navigation performance)两部分,RNP AR 是需要授权的RNP程序,全称为需要特殊航空器和机组授权的所需导航性能(RNP SAAAR,required navigation performance with special aircrew and aircraft authorization required)。固定半径至定位点(RF,radius to fix)航段是RNP AR程序的特有航段,通常在终端或进近程序要求特定曲线转弯时应用。该航段在转弯时航迹精度保持能力与直飞段相同,能提供一个可重复、地面航迹固定的转弯。常规程序在转弯航段航迹保持能力远低于直飞段,更不可能做到航迹固定、可重复。因此,应用RF航段转弯的RNP AR进近程序,飞机转弯航迹相对集中,存在缩减噪声影响面积的潜力,也使得一定位置的噪声敏感点规避更为方便有效。
1 RNP AR与常规进近的航迹差异
RNP程序与常规程序的地面航迹有明显差别,总体来说,常规程序航迹的离散程度远远高于RNP程序。航迹离散由导航误差和飞行技术误差两个方面造成。RNP AR进近拥有完善的监视、告警系统能实时反馈偏离规定航径的侧向距离,通过飞机自动驾驶技术能有效控制飞行技术误差,大大提高了航迹保持能力。相形之下,常规程序导航精度随距导航台距离增大而下降[1]。图1、图2为某U型程序常规进近与RNP AR进近转弯的雷达航迹图。

图1 常规进近程序航迹Fig.1 Normal approach procedure tracks
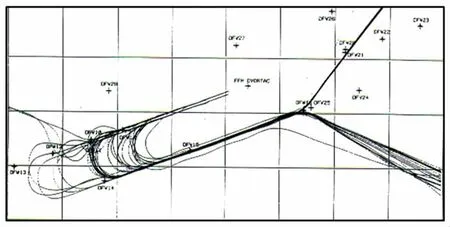
图2 RNP进近程序航迹Fig.2 RNP approach procedure tracks
2 航迹处理
2.1 常规程序航迹处理
常规程序在起始进近转弯过程中,飞机处于非实时导航引领状态。转弯过程中转弯半径、转弯点的位置都影响转弯航迹形状。实际运行中,转弯点的位置与导航精度误差、飞行技术误差以及管制员的干预引导有关。由于RNP AR进近过程中不需要管制员干预,为进行同等条件对比,本文假定管制员干预引导工作在起始进近前已完成。在此条件下,航迹确定的关键就是转弯半径及转弯点位置。转弯半径与速度、转弯坡度等飞机性能有关[2],根据不同类别飞机参数分别确定了B、C、D、E类飞机的平均转弯半径r;转弯点位置通常与距离上一导航台的出航距离有关,最长出航距离D与最短出航距离d之差即为转弯点的径向误差ΔL,如表1[3]和图3所示。出航距离与飞行速度、风速以及飞行员调整航空器构型的时间有关。
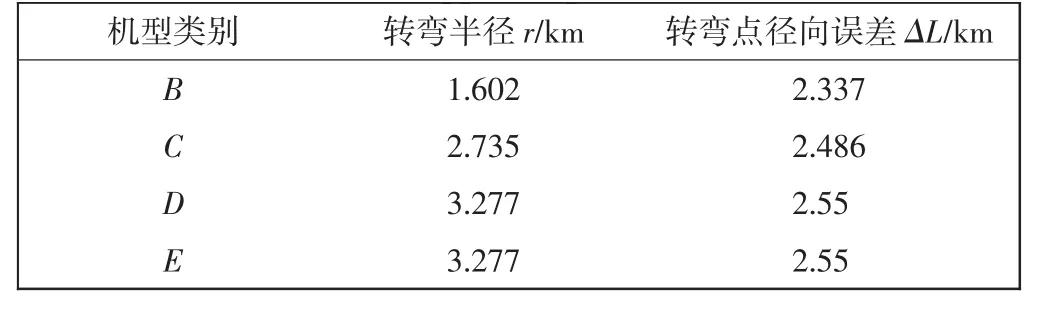
表1 常规程序的转弯半径及转弯点误差Tab.1 Turning radius and turning point error of normal approach procedures
根据B、C、D、E类飞机的转弯半径不同,分为B、C、D/E 3组航迹。根据转弯点误差把每组航迹分为1、2、3等3条航迹,其中航迹1为最早转弯航迹,航迹3为最晚转弯航迹,航迹2则位于两者之间。这样,就得到 B1、B2、B3、C1、C2、C3、D/E1、D/E2、D/E3 等 9 条常规程序的航迹。根据真实航迹分布规律,1、2、3号航迹的飞行活动频率分配比例为1∶2∶1。
2.2 RNP AR进近的航迹处理
RNP导航精度高,并辅以飞机自动驾驶技术控制飞行误差,故RNP程序的航迹相对集中,离散度小。RF航段是RNP AR进近的特有航段,RF航段转弯过程中是实时导航,航迹保持能力与直线航迹的保持能力相同[4]。因此,RF航段的航迹是相对地面固定的可重复航迹[5]。故将RNP AR进近的航迹处理为一条航迹,即标称航迹,如图4所示。

图3 常规程序航迹示意图(C类飞机)Fig.3 Sketch map of normal procedure tracks
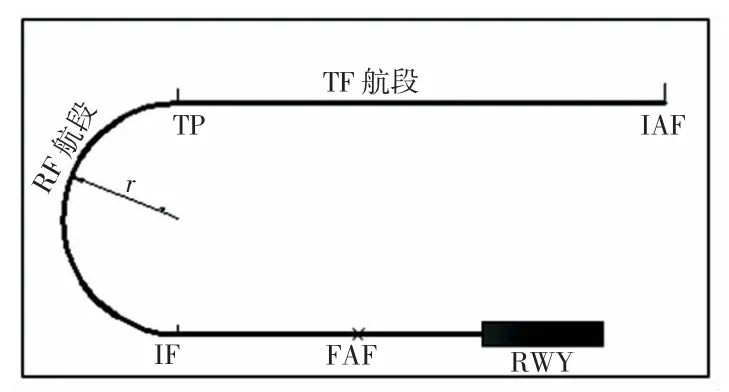
图4 RNP AR进近程序航迹示意图Fig.4 Sketch map of RNP AR APCH tracks
2.3 航迹处理结果
根据前述方法,对图3、图4的航迹的进行处理,结果如表2和图5~图8所示。

表2 常规进近及RNP AR进近航迹数据Tab.2 Track data of normal approach and RNP AR APCH

图5 B类飞机常规进近航迹Fig.5 Normal approach tracks of Class B aircraft
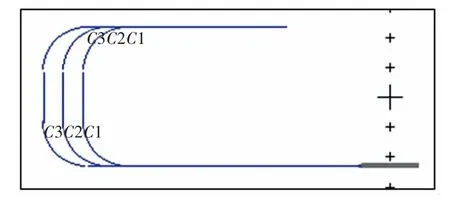
图6 C类飞机常规进近航迹Fig.6 Normal approach tracks of Class C aircraft

图7 D/E类飞机常规进近航迹Fig.7 Normal approach tracks of Class D/E aircraft

图8 RNP AR进近航迹Fig.8 RNP AR approach tracks
3 RNP AR进近的噪声评估
3.1 广州白云机场的运行数据
白云机场是国内第三大机场,存在一定程度的航空噪声影响问题。根据广州白云机场02R号跑道的机型、时段(昼 7:00~19:00、晚 19:00~22:00、夜 22:00~次日7:00)架次等运行数据,对两种程序噪声影响结果进行模拟评估。具体数据[6]如表3、表4所示。
3.2 噪声结果分析
依据表2航迹数据及表3、表4航班架次、时段数据,利用INM软件计算两种程序的噪声等值线图[7],如图9和图10所示。噪声评价量选用计权等效连续感觉噪声级LWECPN[8]。
1)噪声影响区域形状
对比图9、10发现,两种程序65~85 dB噪声影响区域变化不大;55~60 dB噪声影响区域面积变化明显,且主要发生在转弯阶段,该阶段的55 dB噪声影响区域宽度,RNP AR进近明显小于常规进近,减少21.7%;而该阶段的60 dB噪声影响区域沿航迹延伸长度,RNP AR进近明显大于常规进近,转弯区增长约1倍。

表3 常规进近航班架次分配Tab.3 Normal approach flights distribution

表4 RNP AR进近航班架次分配Tab.4 RNP AR APCH flights distribution
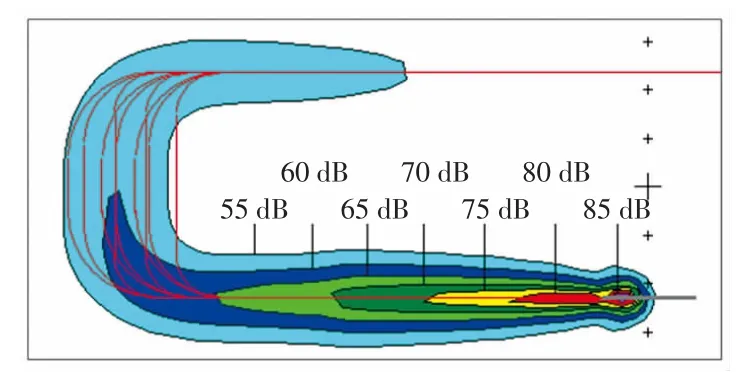
图9 常规进近噪声等值线Fig.9 Noise contour of normal approach

图10 RNP AR进近噪声等值线Fig.10 Noise contour of RNP AR approach
以上变化的原因都在于RF航段的航迹高度集中。航迹集中降低标称航迹两侧的噪声影响,使较低噪声等值线向标称航迹收缩。同时航迹集中增加标称航迹附近的噪声等级,使较高噪声等值线沿标称航迹向外延伸。
2)噪声影响区域面积
利用INM计算所得噪声影响面积,如图11所示。图中可见:噪声值低于75dB时,RNP AR进近程序的噪声影响区域面积大于常规程序。在55~70 dB,RNP AR进近噪声影响区域面积比常规进近增加2.5%、28.2%、9.5%、7.8%。噪声等级高于75 dB时,两者噪声影响区域面积基本相同。从噪声影响面积来看看,实施RNP AR进近程序并没有噪声消减优势。

图11 两种程序的噪声影响面积比较Fig.11 Noise effects comparison of two kinds of approach procedures
4 结语
1)实施RNP AR进近程序与常规进近程序的噪声影响区域面积相比总体变化不大,特定噪声级影响区域面积可能增大。
2)RNP AR进近在转弯区应用RF航段可有效缩小标称航迹两侧的噪声影响区域宽度,细长的噪声影响区域有利于规避噪声敏感点。
3)实施RNP AR进近,转弯区域的较高噪声等值线沿标称航迹向远离机场的方向大幅延伸。
[1]DOC9613AN/937,基于性能导航(PBN)手册[S].Montreal:ICAO,2008.
[2]朱代武,何光勤.目视和仪表飞行程序设计[M].成都:西南交通大学出版社,2004:8-9.
[3]ICAO.航空器运行(第二卷):目视和仪表飞行程序设计(DOC8168)[M].Montreal:ICAO,2006.
[4]蒋维安.基于性能导航(PBN)程序理论与实践[M].成都:西南交通大学出版社,2015.
[5]IB-TM-007-001,要求授权的RNP仪表进近程序设计准则[S].中国民用航空总局空中交通管理局,2007:第2章.
[6]兰德隆与布朗公司.广州白云国际机场噪声监测咨询服务报告[R].兰德隆与布朗公司,2013.
[7]FAA.Integrated Noise Model(INM)Version 7.0 User′s Guide[Z].FAA,2007.
[8]钱炳华,张玉芬.机场规划设计与环境保护[M].北京:中国建筑工业出版社,2000.
猜你喜欢
计算机应用与软件(2021年6期)2021-06-21
上海计量测试(2020年4期)2020-08-31
青年歌声(2019年12期)2019-12-17
航空工程进展(2019年5期)2019-11-05
北京航空航天大学学报(2017年7期)2017-11-24
中国纤检(2016年10期)2016-12-13
北京航空航天大学学报(2016年6期)2016-11-16
大社会(2016年5期)2016-05-04
舰船科学技术(2015年8期)2015-02-27
农家顾问(2009年7期)2009-08-14
