
ACARS地面站功能测试环境的构建与实现
2018-01-24 08:15胡铁乔宋德民李阳波
中国民航大学学报 2017年6期
胡铁乔,宋德民,李阳波
(中国民航大学智能信号与图像处理重点实验室,天津 300300)
飞机通信寻址与报告系统(ACARS,aircraft communication addressing and reporting system)主要用于飞机与地面站之间的双向数据传输,是世界范围内最早使用的甚高频数据链通信系统。ACARS系统主要由两部分组成,即机载设备和地面设备。ACARS专用的甚高频(VHF,very high frequency)通信频段范围是 118~136.975 MHz,其中信道带宽为25 kHz,总信道760个,采用半双工的工作方式。ACARS系统有两类工作模式,即A类模式(category A operation)和B类模式(category B operation),如图1所示。目前所有的机载系统和地面站设备都支持A类模式,B类模式限于部分型号机载系统的通信管理单元(CMU,communication management unit)。A类模式应用普遍,本文主要是在A类模式基础上进行研究。
中国目前使用的是VHF ACARS系统,系统工作频率是131.450 MHz。VHF数据链系统应用的快速发展,不仅为空中交通管理、民航行政管理和国内外航空公司的数据通信提供保障,也带来了巨大的经济效益和社会效益。但国内机场、航空公司以及空管部门使用的VHF设备(包括ACARS设备)大多数来自美国和欧洲,成本高,维护也有一定的困难。国内只有郑州华航科技股份有限公司等少数公司做出的VHF产品在国内机场上有应用。掌握核心技术,做出国产高性能的ACARS设备,是中国民航事业由规模向核心技术发展必须要解决的问题。
1 ACARS地面站功能的测试环境构建
1.1 ACARS系统的两类工作模式
A类模式即广播模式,所有被机载系统发射信号覆盖的地面站都会接收到飞机发送的下行报文,并且将接收到的报文转发到网络管理与数据处理中心(NMDPS,network management&data process system),NMDPS筛选后将质量最好的报文传送到地面用户,同时记录该地面站地址,该地面站将被用作给飞机做应答、发送上行报文。

图1 ACARS系统的两种工作模式Fig.1 Two work modes of ACARS system
B类模式下,地面数字服务提供商(DSP,data link service provider)给每个地面站都分配一个固定的站点地址,该地址就是地面站发送的上行报文模式字符段字符。DSP将这些模式字符提供给机载系统,机载系统的CMU会按照对应的频率保存一张地面站站点地址表,B类模式下飞机的工作频率与该地址表对应,如果飞机改变工作频率,CMU会按照频率对应的站点搜索最佳站点。
1.2 ACARS地面站功能测试环境的搭建
根据ARINC 618规范可将ACARS地面站功能测试环境的构建分为两部分,即软件部分和硬件部分,如图2所示。其中,软件部分主要是在Visual Studio 2013平台上使用MFC技术分别做出模拟地面站DSP和模拟机载CMU。硬件部分主要是在基于FPGA为核心的软件无线台平台上实现VHF收发器的功能。
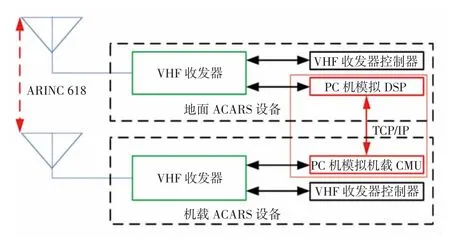
图2 ACARS地面站测试环境Fig.2 Test environment of ACARS ground station
在软件测试环境中,模拟地面站DSP和模拟机载CMU之间直接通过网络通信协议(TCP/IP,transmission control protocol/Internet protocol)通信,实现 ACARS 地面站的基本功能。在硬件测试环境中,模拟机载CMU和模拟地面站DSP分别通过串口与VHF收发器相连,构建一个完整的地空通信系统。每个VHF收发器都有一个VHF收发器状态控制器通过串口控制其工作模式。
1.3 上行数据传输
文献[1]中对ACARS上下行数据传输进行了归纳总结,结合文献[2-3]ARINC 618规范和ARINC 620规范可知,当地面ACARS用户需要向飞机发送消息时,地面终端用户会根据ARINC 620规范将待发送的消息转化成地地报文格式发送给地面站DSP,DSP收到地面终端用户的报文数据后会给地面终端用户一个应答,告诉地面终端用户其已成功收到消息。同时,DSP会按照ARINC 618规范将地面终端用户送过来的报文消息转换成ACARS地空传输格式报文。DSP发送转化好的报文消息,并且启动VGT1(无应答定时器一般持续时间为10 s),CMU在收到该上行报文后会发送一条下行应答报文告诉DSP机载设备已收到该条上行报文,之后CMU会将该条报文所包含的数据消息传送给机载终端用户,如图3所示。

图3 上行报文正常发送Fig.3 Uplink message sent
由于通信环境出现质量差的问题,可能会出现报文丢失等情况。当出现报文丢失情况后DSP的处理方式如图4所示。
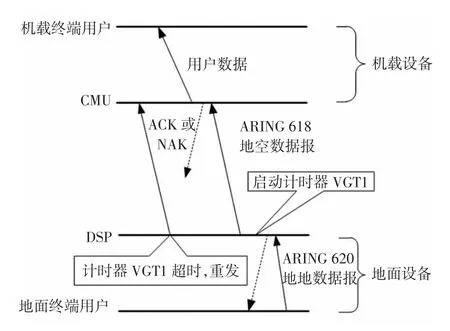
图4 上行报文重新发送Fig.4 Uplink message resent
1.4 下行数据传输
机载CMU收到机载用户的待发数据后,按照ARINC 618规范,将待发数据转化成空地传输格式报文,当信道空闲时CMU发送下行报文,同时启动计时器VAT7(无应答定时器,在A类模式下定时取值为10~25 s之间),地面站收到飞机的下行报文后,DSP会按照ARINC 620规范,将收到的下行报文转化成地地报文传输格式,送给地面终端用户。同时,地面站也会发送一条上行应答报文,告诉机载设备地面设备已成功收到该消息。具体执行过程如图5所示。
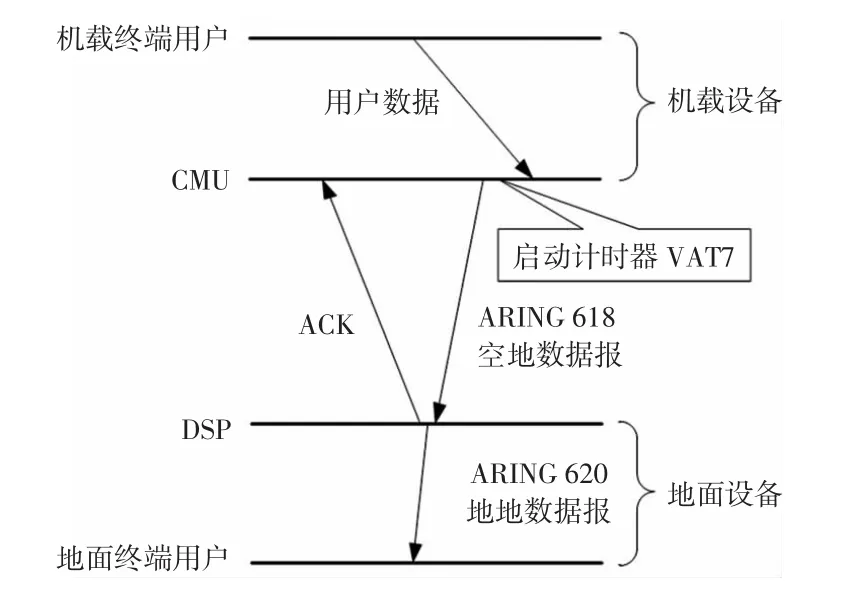
图5 下行报文正常发送Fig.5 Downlink message sent
如果在VAT7规定的时间内,机载设备没有收到地面设备的上行应答报文,机载设备会继续等待;如果超出VAT7规定的时间,机载设备会认为地面站DSP没有收到下行报文,机载设备会重复发送之前的报文;如果机载CMU重新发送的下行报文仍没收到地面站DSP的应答,机载设备会继续重发,但重发次数达到VAC1(重发计数器,值在3~8之间)后,机载设备还没有收到地面站的应答,机载设备会认为ACARS通信链路中断,机载CMU会重新进行通信链路的获取,下行报文重新发送的过程如图6所示。
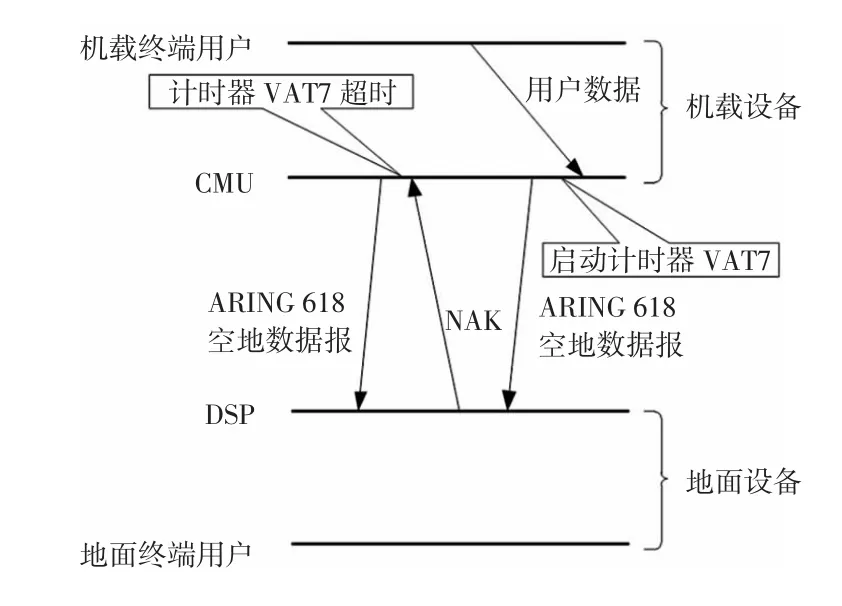
图6 下行报文重新发送Fig.6 Downlink message resent
1.5 软件实现
模拟地面站DSP是在Visual Studio 2013平台上采用MFC技术构建的。模拟地面站DSP在测试环境中相当于一台服务器,根据软件运行在不同的计算机平台有不同的IP地址,当模拟机载CMU和模拟地面站DSP工作在同一台计算机上时,模拟地面站DSP的IP地址默认为127.0.0.1,当两者工作在不同的计算机上时,机载CMU连接的IP地址为地面站DSP所在计算机的IP地址。模拟地面站DSP在软件测试环境下能够定时广播断续报文(SQ,squitter message)消息,并能够显示接收到的飞机基本消息和对飞机消息做应答的功能。模拟地面站DSP软件界面如图7所示。

图7 模拟地面站DSPFig.7 Simulated ground station DSP
模拟机载CMU可自定义报文相关信息,并且具有自动发送报文的功能,为测试模拟地面站DSP的通信功能提供ACARS报文数据。在软件测试环境下,模拟机载CMU可通过TCP/IP连接到模拟地面站DSP,点击发送按钮可以将模拟ACARS报文发送到模拟地面站DSP。模拟机载CMU软件界面如图8所示。
模拟机载CMU发送报文到模拟地面站DSP,模拟地面站DSP会根据ACARS链路层消息处理机制对模拟机载CMU发送过来的数据进行处理,并且会发送对应的上行报文做应答。
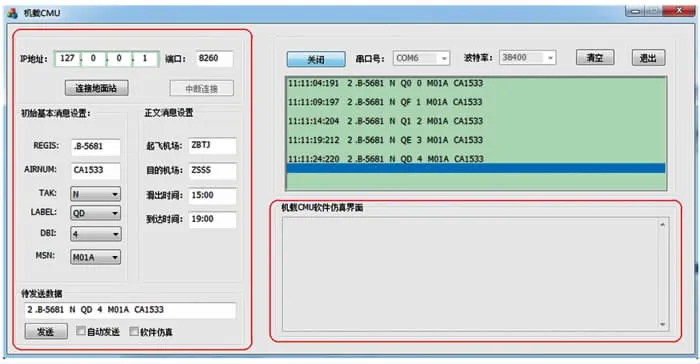
图8 模拟机载CMUFig.8 Simulated airborne CMU
模拟地面站DSP工作后,每隔10 s发送一条SQ消息。真实地面站SQ消息至少每2 min广播一次,信道繁忙时每10 min广播一次。在软件实现中,将SQ消息设置为每10 s发送一条。模拟机载CMU与模拟地面站DSP建立连接后能收到模拟地面站发送的SQ消息,并且模拟地面站DSP能对接收到的模拟飞机报文消息做出应答后发送到模拟机载CMU软件界面。模拟地面站DSP和模拟机载CMU的软件界面都能同时显示接收到的消息和应答的消息,如图9所示。
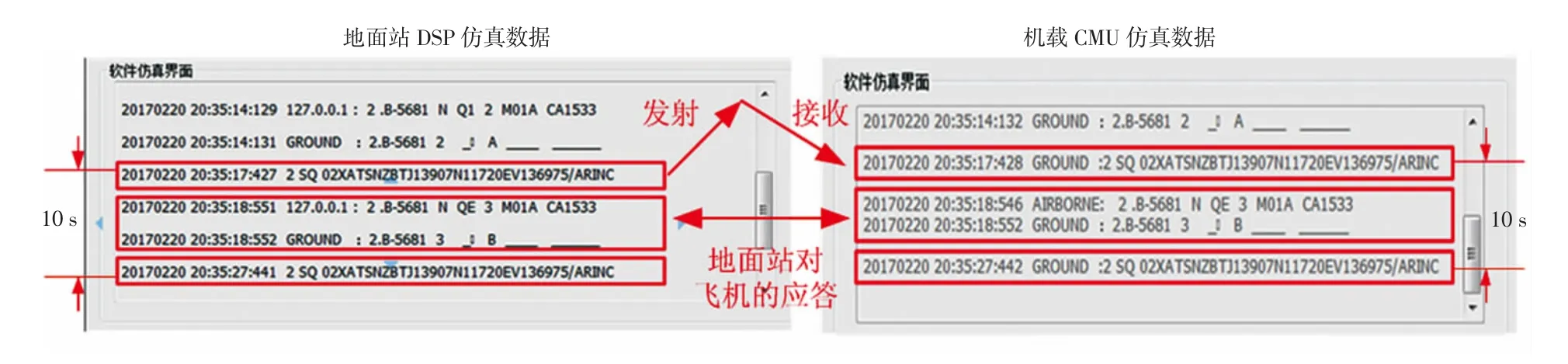
图9 软件仿真数据Fig.9 Software simulation data
2 VHF收发器
本文研究内容中,VHF收发器的主要功能是实现ACARS物理层的功能。文献[4-6]中有ACARS物理层实现的方法。VHF收发器和VHF收发器远程状态控制软件通过串口相连,串口通信速率设置为38 400 bps。VHF收发器的组成部分如图10所示。
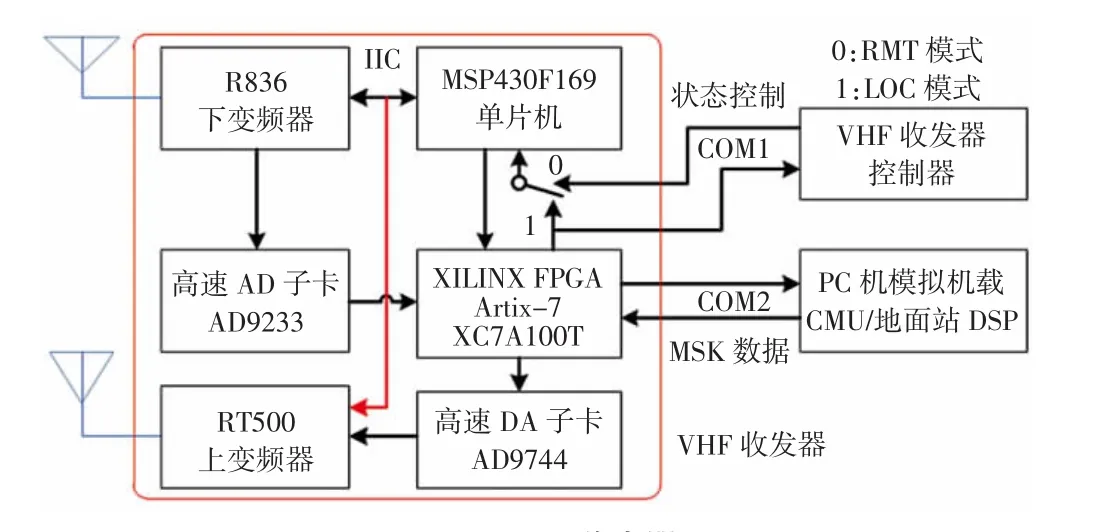
图10 VHF收发器Fig.10 VHF transceiver
通过VHF收发器远程状态控制软件发送相关指令,可对VHF收发器进行功能测试以及状态监控和工作模式的选择。VHF收发器主要有两种工作模式,即本地模式(LOC模式)和远程模式(RMT模式),两种模式可通过按键切换,VHF收发器远程状态控制软件如图11所示。
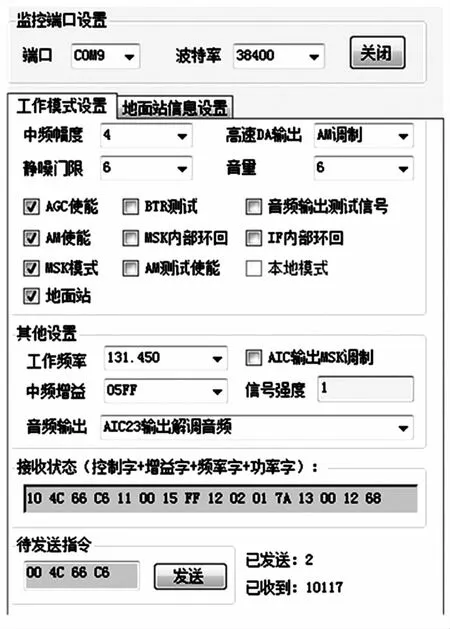
图11 VHF收发器远程状态控制软件Fig.11 State control software of VHF transceiver
当VHF收发器工作在本地模式时,模拟机载CMU和模拟地面站DSP不能对VHF收发器进行操作,VHF收发器具有地面站通信的基本功能,能按规定时间广播SQ报文,同时能接收下行报文并将接收到的报文传送到计算机保存,且具有对下行报文做应答的功能;此时,VHF收发器工作的状态信息会通过串口发送到VHF收发器状态控制软件,便于监控VHF收发器的工作状态。
当VHF收发器工作在远程模式时,模拟机载CMU和模拟地面站DSP可通过VHF收发器远程状态控制软件对VHF收发器进行设置。VHF收发器具有地面站的基本功能,即按规定时间广播SQ报文,同时能接收下行报文并将接收到的报文传送到计算机保存,且具有对下行报文做应答的功能;VHF收发器远程状态控制软件可以控制VHF收发器的工作状态,通过串口将状态控制字传送MSP430单片机,单片机控制下变频器将相应的状态消息传送给FPGA,从而使VHF收发器工作在不同的状态,VHF收发器会将状态信息传送给VHF收发器远程状态控制软件进行监控。
3 软硬件结合测试ACARS地面站功能
在软硬件结合的测试环境下,通过VHF收发器键盘上的LOC/RMT按钮,将模拟地面站切换到RMT工作模式。为验证构建的模拟地面站功能,将VHF收发器工作频率调到131.450 MHz。此时VHF收发器默认具有接收和发送ACARS报文的功能,并且定时广播SQ报文。ACARS地面站所具有的标志性通信功能就是广播SQ报文。通过接收到天津机场的SQ报文研究可以发现,目前天津机场发射的SQ报文有两种格式,即正文分别以“01”和“02”开头,两种报文交替发射。于是,将软硬件结合构成的ACARS地面站广播的SQ报文设置成两种,按照ARINC 618规范相同报文发送间隔时间为2 min,不同报文间隔时间为1 min。如图12所示,报文内容包含有“ARINC-TEST”标识的是模拟地面站发射的SQ报文,其中相邻的“02”开头和“01”开头的 SQ 报文时间间隔为 1 min;以“02”或“01”开头相同的SQ报文时间间隔为2 min。
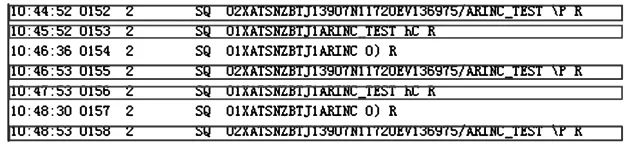
图12 SQ报文Fig.12 Squitter message
在一台计算机上,将模拟机载CMU软件端中的机尾号设置为B-5681(可以自由设置),且将模拟机载CMU设置为自动发送ACARS报文模式。模拟机载设备每5 s发射一条ACARS报文,如图13所示。在另一台计算机上,模拟ACARS地面站在不做应答的情况下能正常接收到模拟机载设备发射的报文,如图14所示。图13和图14中方框标记的报文分别为模拟机载设备发射和模拟地面站接收到对应的ACARS报文。
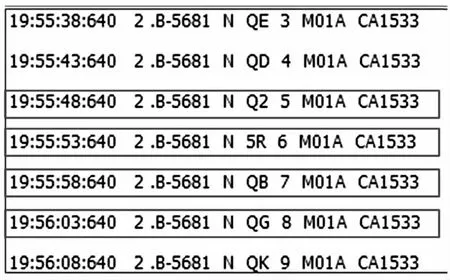
图13 模拟机载设备发射的ACARS报文Fig.13 ACARS messages sent by simulated airborne equipment

图14 模拟地面站接收的ACARS报文Fig.14 ACARS messages received by simulated ground station
模拟地面站工作在应答模式能对接收到的模拟ACARS报文做应答,如图15所示。模拟机载设备发出ACARS报文后,收到模拟地面站的应答报文。为方便区分,将模拟地面站应答报文标签统一设置为“TX”,并且应答消息不包含正文。由于仿真较为理想,且4根VHF天线距离较近,所以发射端和接收端延时较小,模拟机载设备发射报文后到接收到其应答报文在1 s内基本能够完成。

图15 对模拟ACARS报文的应答Fig.15 Acknowledgement to simulated ACARS messages
关闭模拟机载设备,让模拟地面站独立工作在应答状态,模拟地面站能有效地对接收到飞机的真实ACARS报文做应答。标签为“TX”的报文即为模拟地面站对真实ACARS报文的应答报文,如图16所示。
4 结语
本文主要在研究ARINC 618规范的基础上,使用两种方法搭建和实现ACARS地面站功能的测试环境,即纯软件实现模拟机载CMU和模拟地面站DSP以及软硬件结合实现模拟地面站和模拟机载设备。软件部分使用网络传输控制协议进行通信,硬件部分在真实的ACARS系统工作频率131.450 MHz上进行测试。通过实验可知,软件模拟地面站DSP以及软硬件结合实现的模拟ACARS地面站都能够实现ACARS地面站发送SQ消息的标志性功能,并且模拟地面站能够对模拟和真实的ACARS下行报文做应答,实现ACARS地面站的基本功能。

图16 对真实ACARS报文的应答Fig.16 Acknowledgement to real ACARS messages
[1]刘海涛.航空移动通信系统[M].北京:清华大学出版社,2015.
[2]ARINC Specification 618-5,Air/Ground Character-Oriented Protocol Specification[S].2000.
[3]ARINC specification 620-6,Air/Ground Character-Oriented Protocol Specification[S].2007.
[4]吴仁彪,王心鹏,胡铁乔,等.单通道恒模抗干扰民航VHF接收机设计与实现[J].中国民航大学学报,2014,32(2):1-5.
[5]胡铁乔,吴 勇,吴仁彪,等.双通道恒模干扰抑制VHF接收机设计与实现[J].中国民航大学学报,2015,33(1):13-18.
[6]张鹏飞.VHF自适应干扰抑制电台研制[D].天津:中国民航大学,2014.
猜你喜欢
汽车电器(2022年9期)2022-11-07
装备环境工程(2022年9期)2022-10-13
空间科学学报(2021年6期)2021-03-09
铁道通信信号(2020年4期)2020-09-21
网络安全和信息化(2019年5期)2019-12-23
中国外汇(2019年11期)2019-08-27
现代电子技术(2017年14期)2017-07-25
中国市场(2016年36期)2016-10-19
科教导刊·电子版(2016年13期)2016-06-28
网络与信息(2009年9期)2009-10-30
