
声速对多波束校准精度影响分析
2018-01-22 05:27:35郑建
大坝与安全 2017年6期
郑建
(浙江华东测绘地理信息有限公司,浙江杭州,310014)
1 概述
随着我国海洋测绘的蓬勃发展,多波束测深系统已经广泛应用于我国海洋工程测量、海洋资源调查、航道测量、水库测量等领域[1]。目前不但在我国沿海区域应用广泛,而且在内陆水库库容复核以及淤积测量中的应用也越来越普及。由于多波束自身系统非常复杂,对设备以及技术方面要求较高,尤其是在多波束校准过程中,必须对关键性因素进行严密控制,提高多波束校准精度,确保得到高质量的水深测量数据。考虑到内陆水库水体对多波束影响因素比海洋少(海洋中风浪较大、洋流分布复杂导致水体中盐度、密度等变化复杂),以某水库库容测量中多波束校准因素结构变化实例来分析声速对多波束校准精度的影响。
多波束测深系统基本工作原理为:发射换能器定向激发一排声学能量信号,各波束在水体中沿实际声线传播,当遇到水底时通过反射和散射返回接收换能器,接收换能器记录各波束的到达角度和传播时间,根据声线在水体中的实际传播路径,计算出各波束点的深度以及相对于中央波束的水平距离,并通过定位、姿态、吃水等各项改正以及其他数据融合计算处理,得到呈条带状分布的测量成果。由于声波在水体介质中并不是直线传播[2],表面声速与声速剖面的数据精度就格外重要。
实际上,在多波束校准过程中,声速剖面测量工作容易被忽略,表层声速仪也容易因为安装过浅或水生植物附着导致所得表层声速精度较差,笔者利用实际测量数据论证了声速误差对多波束校准精度影响的重要性。
2 多波束校准以及各姿态偏差对多波束点位坐标的影响
2.1 船体坐标系与多波束换能器坐标系
多波束测深系统在测量船上安装完毕后,就存在着两个坐标系统:船体坐标系与多波束换能器三轴坐标系,两坐标系偏差示意图如图1所示。多波束测深系统进行水下测量时,上述两种坐标系之间势必存在着坐标旋转(横摇、纵摇及艏向)的偏差。

图1 船体及多波束换能器坐标系偏差示意图Fig.1 Coordinate system deviation between hull and multibeam transducer
多波束校准工作的目的是以船体坐标系为基准,计算出多波束换能器坐标系与船体坐标系之间的偏差值。
2.2 横摇校准及影响分析
横摇校准是针对多波束测深系统换能器在安装过程中必然存在的横向角度误差而采取的一种校准方法。选择一块水深较深、地形平坦的水域,在同一条测线上以相同的速度往返测量,如图2所示。往返测量后的水深断面成交叉状,两个交叉断面就是因为存在横摇偏差所引起的。
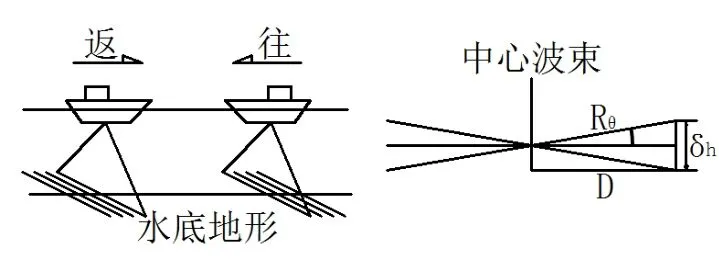
图2 多波束横摇校准示意图Fig.2 Multi-beam roll calibration
此时,同位置两交叉断面的夹角正好是2倍的横摇角度,则横摇偏差可按下式进行计算:

式中,Rθ为横摇偏差角;D为边缘水深点到航迹方向上的垂向距离;δh为往返测量方向上的水深差值。
多波束水深测量规定中[3],横摇校准误差应小于0.05°。假设测区水深为30 m,波束横向开角为120°,横摇校准误差为0.05°,边缘波束将产生约±0.05 m的水深误差;当横摇校准误差为0.1°时,将会对水深产生±0.1 m的误差。横摇校准误差会对所测水深值产生较大影响[4]。
2.3 纵摇校准及影响分析
多波束探头的纵向安装角度存在偏差时,会引起测点的水深沿航迹方向发生前后的位移变化,如图3所示,当存在向前的纵倾角时,往返测的水下地形会发生很明显的向后、前平移,位置与水深不相匹配,往测时,水深变深;返测时,水深变浅。
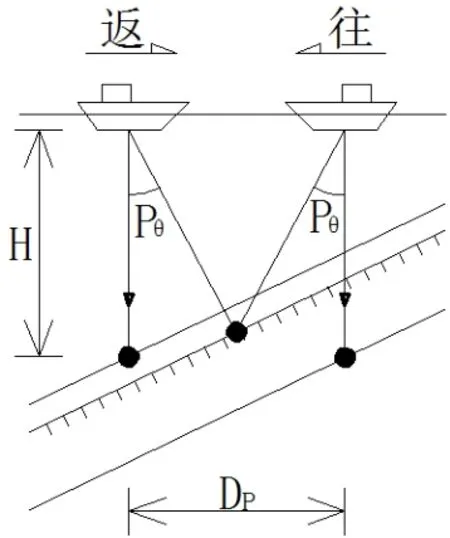
纵摇的校准对地形选择的要求是:坡度大于10°的斜坡形海底,或海底存在有明显突起物或凹坑的特征区域,测线垂直于斜坡等深线方向布设(或穿过海底明显的突起或凹陷地形)。测量时,测量船沿同一测线以相同的速度往返测量,如图3所示,其纵向偏差角可以很容易按式(2)进行计算:

式中,Pθ为纵摇偏差角;DP为同一水深点两次测量的位置差;H为测点到多波束探头中心的距离。
多波束水深测量规定中,纵摇校准误差应小于0.3°,假设测区水深为30 m,波束横向开角为120°,纵摇校准误差为0.3°,边缘波束将产生约±0.05 m的水深误差,纵摇校准误差对水深测量的影响比横摇校准误差小,但纵摇校准误差过大时,也会对水深测量精度造成影响。
2.4 艏向偏差校准及影响分析
在进行多波束安装时,罗经的指向与多波束探头纵轴的指向不一致,从而使多波束测量时艏向指向性存在偏差,造成测点位置以中央波束为原点的旋转位移,即这种位移具有在中心处位移为零,但在边缘波束处增至最大的特点,当存在航道偏差时,对多波束水深成果的拼接会产生一定的影响。选择一片坡度大于10°的海底地形,垂直于斜坡等深线方向布设两条平行的测线,测线间距大约为多波束平均扫宽的一半,如图4所示。
校准时同方向、同速测量L1、L2两条测线,由于艏向偏差的存在,重叠区相同水深处的位置会发生一定的偏移,不考虑其他误差因素的影响,同一测深点两次测量的理论偏移距应该是相同的,其艏向偏差可通过式(3)进行计算:
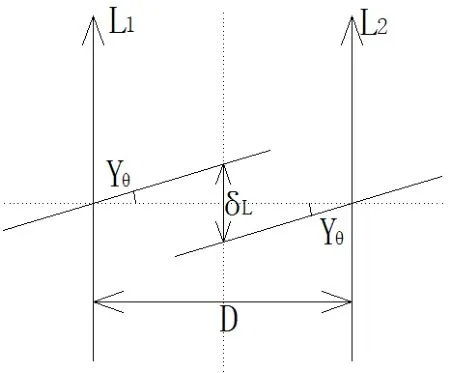
图4 多波束艏向偏差校准示意图Fig.4 Multi-beam heading deviation calibration
Yθ=arctan(δL/D) (3)
式中,Yθ为艏向偏差角;δL为同一测点的位置差;D为两条测线间的距离。
多波束水深测量规定中,艏向偏差校准误差应小于0.1°,假设测区水深为30 m,波束横向开角为120°,艏向偏差校准误差为0.1°,边缘波束将产生约±0.09 m的点位误差,在水下地形坡度较缓的区域对水深误差的影响可以忽略不计,所以艏向偏差校准误差对点位精度影响较大,对水深精度影响较小。
3 表层声速对多波束校准精度的影响分析
多波束测深系统通过声线跟踪反演各波束测点的空间位置,在计算过程中,表层声速对多波束发射换能器的波束指向角以及各波束脚印的平面位置和水深值有着决定性的影响,尤其是对开角60°以上的边缘波束的测量精度影响较大。
3.1 表层声速对发射换能器波束指向角的影响
多波束的发射换能器根据声学原理,对扇面内每个波束的指向角度进行定义,但如果保证每个波束方向信号足够强,在波束形成发射时,会产生时延。多波束系统采用FFT波束形成技术,保证各方向波束信号强度。
设多波束换能器发射阵列由N个基元组成,各基元之间间隔为L,波束以一定频率ƒ从θ方向入射到波阵面时,第k个波束的指向角计算方程经过FFT变换后为[5]:

将λ=v0/ƒ代入式(4)可得:

式中,v0为换能器表层声速。由式(5)可以看出,当波束发射频率固定时,波束指向角θ0只与表层声速v0有关,当v0误差增大时,会造成θ0的误差同时增大,同时也会影响计算出的横摇、纵摇、艏向偏差的精度。下面按照文献[6]提出的方法,通过实例分析表层声速误差对各项姿态偏差的影响。
3.2 表层声速对横摇、纵摇、艏向偏差精度的影响
利用在某水库库容复核测量中RESON Sea-Bat7125型多波束测深系统测量的实例数据,来分析说明表层声速对多波束校准精度的影响。在多波束校准过程中,多波束覆盖角为140°,并严格选取合适地势,准确测定校准过程中的表面声速,计算得到符合测量要求的准确横摇、纵摇以及艏向偏差值,如图5~7所示。
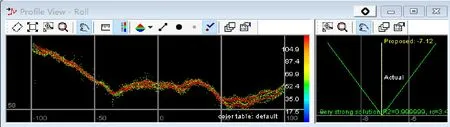
图5 横摇校准图Fig.5 Roll calibration
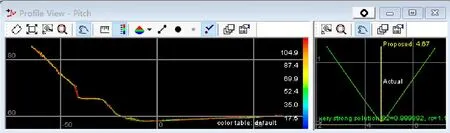
图6 纵摇校准图Fig.6 Pitch calibration
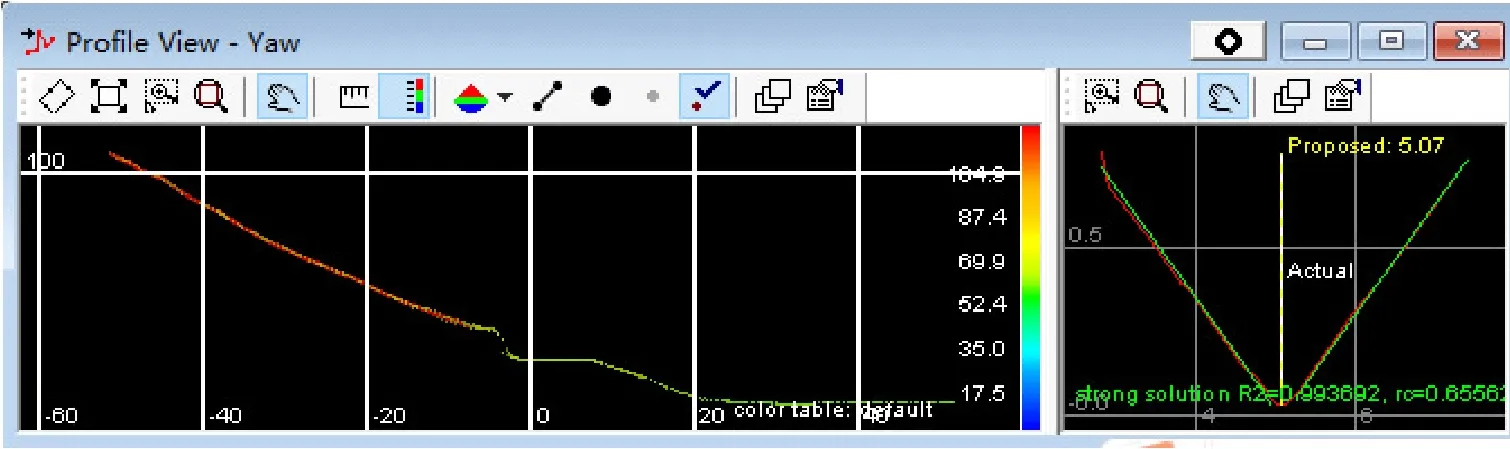
图7 艏向偏差校准图Fig.7 Heading deviation calibration
校准过程中所使用的声速剖面由声速剖面仪测定,导入多波束后处理软件得到声速剖面曲线图,如图8所示。
声速剖面不变,改变表面声速值,求得不同表面声速状态下校准数值,如表1所示。
表1中,表层声速为1 462.2 m/s时测量的校准值是正确的,此时水底地形是平坦的,所得各种数据也符合IHO S-44标准要求。而使用其他表层声速时,测量的地形发生了变化,计算出的各校准值也出现了不小的变化:表层声速比实际值小时,波束指向角变大,测量覆盖宽度变大,边缘波束测量所得水深值比实际值小,所得地形条带呈现“笑脸”状,此时横摇、纵摇、艏向偏差的绝对值都变小;表层声速比实际值大时,波束指向角变小,测量覆盖宽度变小,边缘波束测量所得水深值比实际值大,所得地形条带呈现“哭脸”状,此时横摇、纵摇、艏向偏差的绝对值都变大。
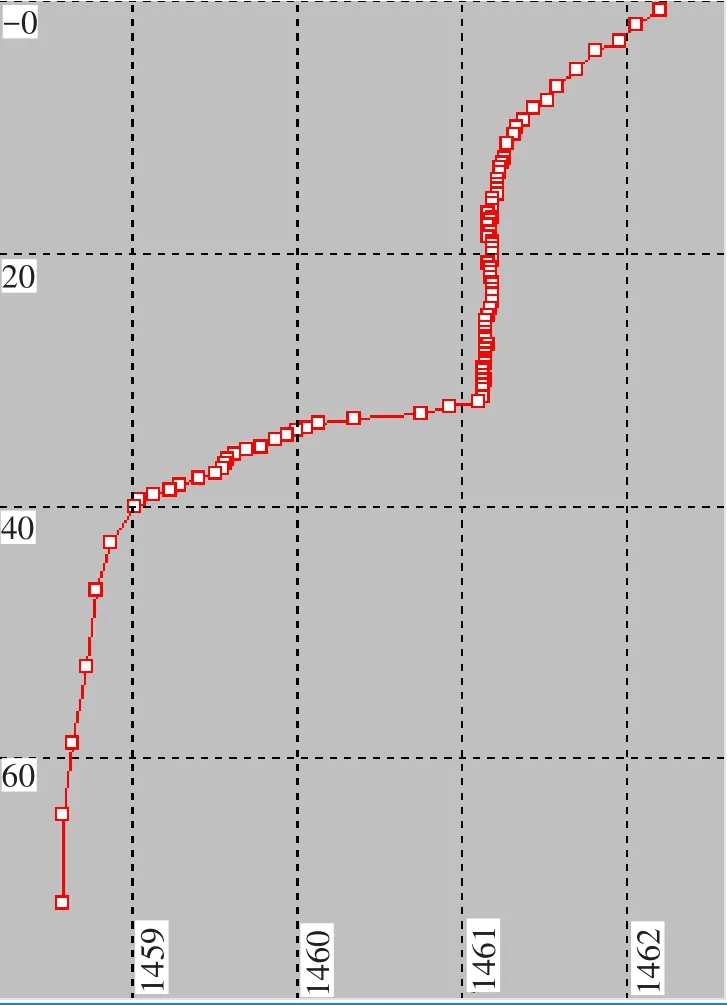
图8 声速剖面曲线图Fig.8 Sound speed profile
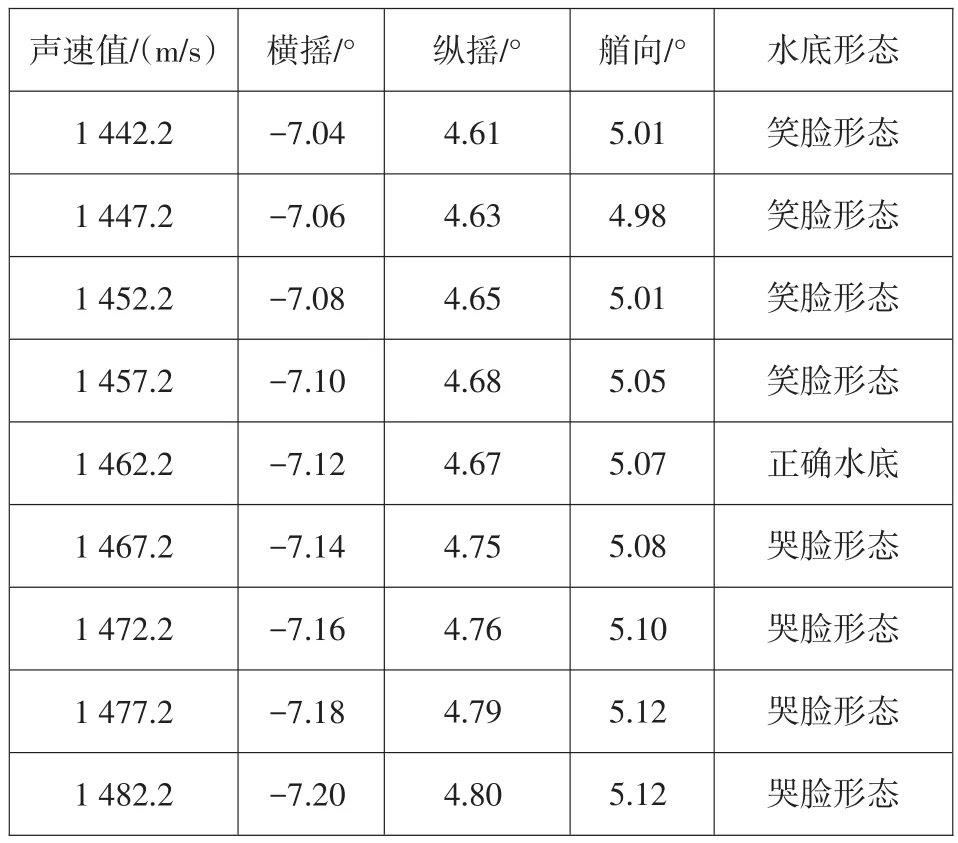
表1 不同表层声速对校准值的影响Table 1 Effect of different surface sound speed on calibration value
4 声速剖面对多波束校准精度的影响分析
由于多波束测深系统每Ping(脉冲击发)个波束呈扇面发射,准确了解声线在水体中的传播路径是多波束测深数据处理的关键。根据斯涅尔定律,一方面声线遇到介质物理特性变化时会发生折射,将导致测深点出现位置上的偏差,另一方面声波在海水中的实际传播速度与标准速度(一般假定为1 500 m/s)的差异也将造成传播距离上的误差,而且这两种误差均随波束角的增大而非线性地增大。水体的温度、盐度、密度和压力等海洋环境因素是影响海水声速的重要因子。由于水体温度、盐度、密度要素在时间、空间上存在着多维复杂变化特性,因此水体声速在时间、空间上必然也呈多维复杂变化,所以声速剖面数据的精确性对多波束测深数据的影响是显著的。
在验证声速剖面对横摇、纵摇、艏向偏差精度影响时,用表层声速仪实际测量的多波束换能器表层声速为1 462.2 m/s,覆盖角为140°。首先使用当时测定的声速剖面数据进行多波束校准计算,记录校准数据,然后保持表面声速不变,使用统一加减固定声速值的声速剖面数据分别导入进行声速改正,然后计算多波束校准值,所得结果如表2所示。
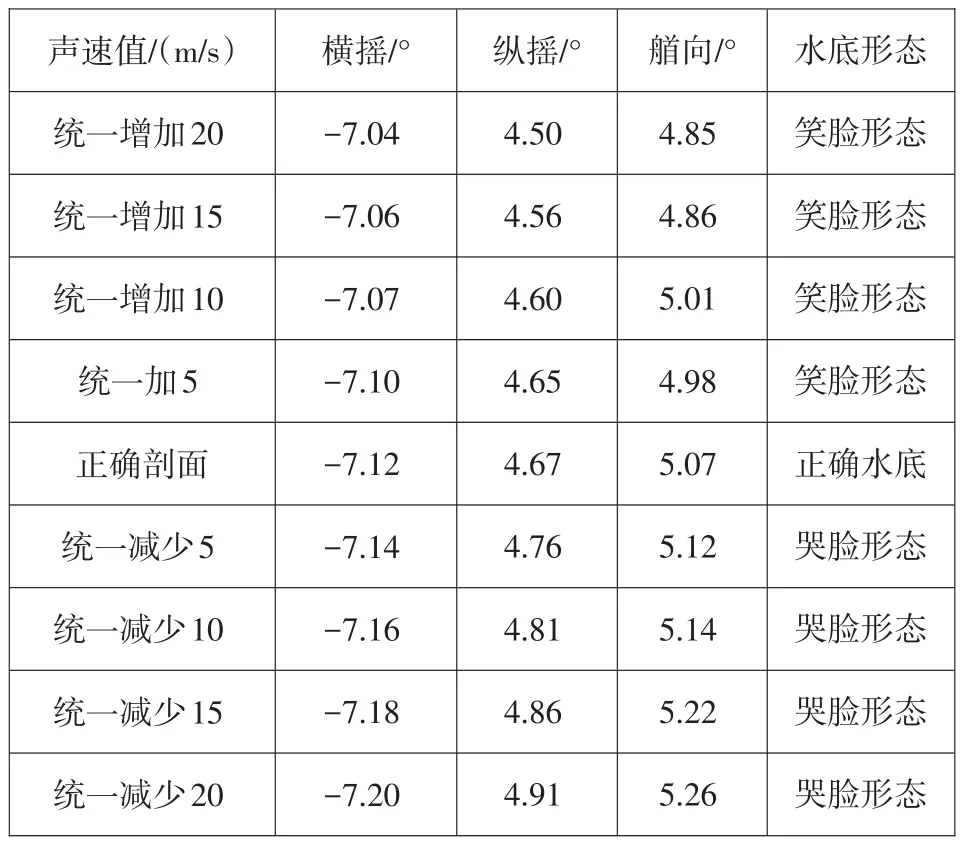
表2 不同声速剖面对校准值的影响Table 2 Effect of different values of sound speed profile on calibration value
表2中,声速剖面数据比实际值大时,波束在水体介质中折射程度变大,测量覆盖宽度变大,边缘波束测量所得水深值比实际值小,所得地形条带呈现“笑脸”状,此时横摇、纵摇、艏向偏差的绝对值都变小;声速剖面比实际值小时,波束在水体介质中折射程度变小,测量覆盖宽度变小,边缘波束测量所得水深值比实际值大,所得地形条带呈现“哭脸”状,此时横摇、纵摇、艏向偏差的绝对值都变大。
5 结语
通过某水库测量实例分析得出,声速误差对多波束校准精度影响显著,当表层声速数值或声速剖面数值变化时,在其变化值相同的情况下,对横摇精度的影响是相同的,对纵摇以及艏向偏差的影响是不同的,声速剖面测量误差对纵摇和艏向偏差的影响更大。由此可知,除了多波束测量过程中各种因素影响之外,测量作业之前校准过程中若表层声速和声速剖面数据误差较大时,将导致横摇、纵摇、艏向偏差的计算误差增大,再将错误校准值应用到多波束水深测量时,会导致所得水深数据严重失真。根据本次对多波束校准中声速的影响分析,在实际多波束测量作业过程中应注意以下几点:(1)在多波束校准之前,需要使用比测的方法检验表层声速仪以及声速剖面仪是否精准;(2)在多波束校准所选范围内,多次测定本区域声速剖面以确保校准时使用的声速剖面数据准确可靠;(3)在校准计算时,应同时将表层声速和声速剖面数据正确导入,共同作为校准测线声速改正使用。
笔者也在海洋中进行了相关研究,但不同的海域条件下,水体中其他影响因素过于复杂,声速对多波束校准影响实验的可重复性较差,需配备更完善的海洋设备进行配合实验,才能得到较完善的实验成果。
[1]刘经南,赵建虎.多波束测深系统的现状和发展趋势[J].海洋测绘,2002,22(5):3-6.
[2]黄晨虎,陆秀平,欧阳永忠,等.多波束水深测量误差源分析与成果质量评定[J].海洋测绘,2014,34(2):1-6.
[3]JT/T 790-2010,多波束测深系统测量技术要求[S].
[4]赵建虎,刘经南,张红梅.船姿分析及其对多波束测量的影响[J].武汉大学学报(信息科学版),2001,26(2):144-149.
[5]赵建虎.多波束深度及图像数据处理方法研究[D].武汉:武汉大学,2002.
[6]董庆亮.表层声速对多波束系统测量的影响[J].测绘通报,2012(2):7-10.
猜你喜欢
河北水利(2022年10期)2022-12-29 11:48:12
海洋通报(2022年4期)2022-10-10 07:40:32
海洋石油(2021年3期)2021-11-05 07:43:10
河北环境工程学院学报(2021年1期)2021-03-19 08:43:00
中学生数理化·八年级物理人教版(2016年7期)2016-12-24 09:46:57
焊接(2015年6期)2015-07-18 11:02:25
浙江国土资源(2015年4期)2015-05-09 08:43:59
航空学报(2015年4期)2015-05-07 06:43:32
航空学报(2015年4期)2015-05-07 06:43:28
机械制造与自动化(2014年1期)2014-03-01 04:22:04
