单矢量水听器的目标测向及试验研究
2018-01-22 03:38:56程亚乔林旺生刘福臣刘坤
声学与电子工程 2017年4期
程亚乔 林旺生 刘福臣 刘坤
(声纳技术重点实验室 第七一五研究所,杭州,310023)
矢量传感器同时获取海洋声场中声压和振速信息,具有偶极子指向性且与频率无关的特点,依靠单个矢量传感器即可完成以往需要声压阵才能实现的目标方位估计。因此基于单矢量传感器的方位估计问题是水声信号处理研究的一个重要领域[1-6]。经过二十余年发展,单矢量水听器方位估计技术在理论和仿真研究方面均取得了丰硕成果,然而在实际工程应用中,单矢量水听器方位估计的使用并不广泛,其主要原因在于实际使用的矢量水听器受工艺条件限制难以达到理想电声参数特性要求,制约其方位估计精度。另一方面,探测平台受海流、潮汐等海况影响,往往会产生倾斜、摇摆、旋转等复杂变化,影响目标真实方位的获取。
本文致力于消除复杂海洋环境下对单矢量器动态变化和非理想电声参数制约影响,提出单矢量水听器目标测向方法,在实际工程应用具有十分重要的意义。
1 基于单矢量水听器的方位估计方法
基于单矢量水听器的目标测向主要实现方法流程示意见图1。
1.1 电声特性补偿方法
矢量水听器电声特性是因制作工艺等原因导致的非理想电声参数,使用前必须对其校准、补偿,以保证测向结果的准确性,否则会对矢量水听器的测向应用带来较大影响。校准与补偿主要包括通道灵敏度、相位一致性等。
1.1.1 各通道灵敏度(幅度)校准
通过比较法,记录采集到的标准水听器响应有效值U标以及被测矢量水听器各个通道响应有效值U测,利用标准水听器灵敏度M标以及U标、U测的测量值,就可以求得各个频率下矢量水听器各通道的灵敏度M测。然后以标准水听器的灵敏度(或以矢量水听器声压通道的灵敏度)为参考值,计算出各通道在该频点灵敏度的补偿因子。
声源级与水听器灵敏度的关系式如下:

其中,r为声源目标到水听器的距离;a1、a2分别表示标准水听器和被测水听器的放大倍数。将式(1)中的两个式子联立,可以计算出M测为:

1.1.2 各通道相位校准
在进行相位补偿时,可以首先测出接收数据的声压、振速各自的相位,然后以声压通道的相位作为标准,计算出各振速通道与它的相位差作为补偿因子进行补偿,使得它们之间的相位差为 0°或180°。
利用自适应相位计,求得声压振速的初始幅度(灵敏度)和相位,将其与实际测量的幅度(灵敏度)和相位进行比较,以声压通道为基准,计算出各通道幅度(灵敏度)和相位补偿因子。
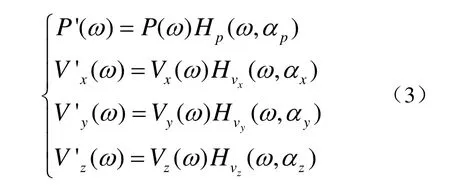
1.1.3 补偿方法
频域电声特性补偿公式如下:
1.2 矢量场振速信号复原
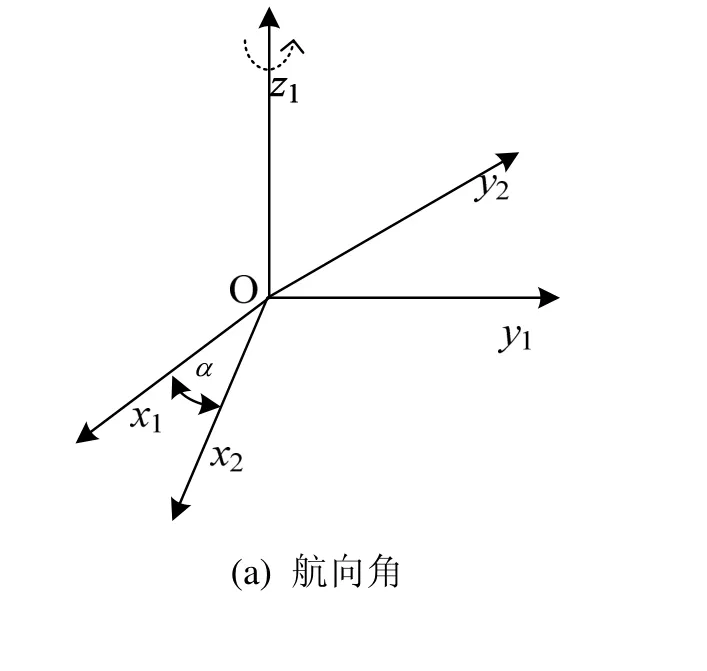
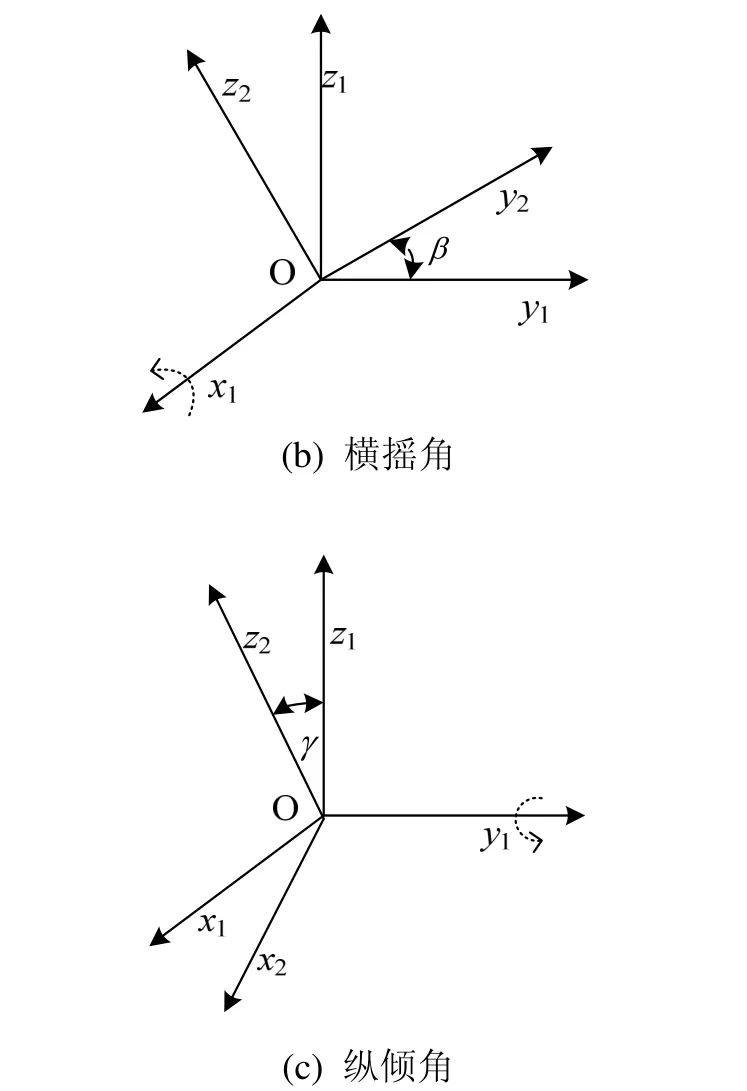
图2 姿态角示意图
矢量水听器在三维空间中的自由度为 3,以其中α、β、γ分别标记矢量水听器的姿态传感器测得的x、y、z三个方向上的夹角。定义修正矩阵为

由矢量水听器姿态角计算姿态变换矩阵R,从而得到目标的大地方位的修正后的振速信号为:
1.3 自适应相干累积
自适应调整相干累积时间T:
式中,T根据矢量水听器和目标方位变化速率调整。
1.4 空间谱估计方法
若考虑K个互不相干的窄带信号入射到三维单声矢量传感器上,传播介质各向同性,则单声矢量传感器输出的窄带模型满足:

式中,S是信号数据矢量,N是噪声数据矢量,是4×K维的个声矢量传感器阵列流形矢量,满足:


在特定条件下,宽带信号的各个频率分量仍然满足窄带信号的假设条件,此时单声矢量传感器的宽带输出模型为:
阵列数据的协方差为

由于信号与噪声相互独立,数据协方差矩阵R可以分为与信号、噪声相关的两部分,对R进行特征分解为

式中,US是由大的特征值对应的特征矢量张成的子空间,即信号子空间,而UN是由小的特征值对应的特征矢量张成的子空间,即噪声子空间。而且,协方差矩阵大特征值对应的特征矢量张成的空间与入射信号的导向矢量张成的空间是同一个空间。在理想条件下,数据的信号子空间与噪声子空间正交,即入射信号的导向矢量与噪声子空间正交

基于单声矢量传感器MUSIC算法的空间谱估计表达式为[3]:
式中,Un是单声矢量传感器数据协方差矩阵Rx特征分解后得到的噪声子空间。显然,当导向矢量指向信号空间时,式(14)成立,对空间谱进行搜索即可求出所有的峰值对应的。
2 试验验证
在舟山某海域开展了目标方位估计试验。试验时模拟声源于 2 km远处发射信号,目标方位116.6°,工作深度约为20 m,矢量声系统座底。图3给出了常规算法与本文提出算法的方位估计历程,图4给出了方位估计精度统计分析结果,结果表明方位估计原点距在2°以内,验证了所提出方法的有效性。
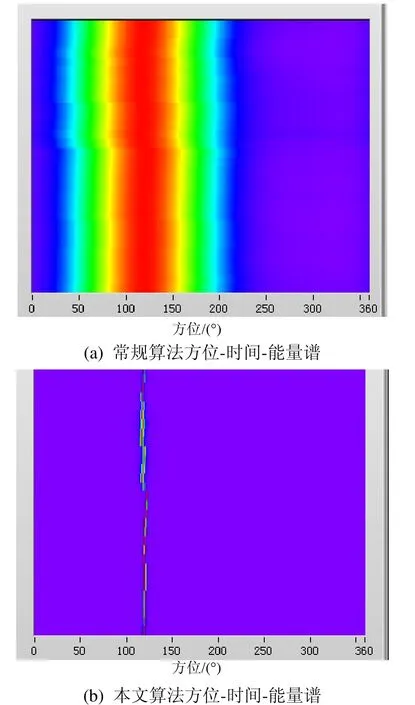
图3 方位估计历程
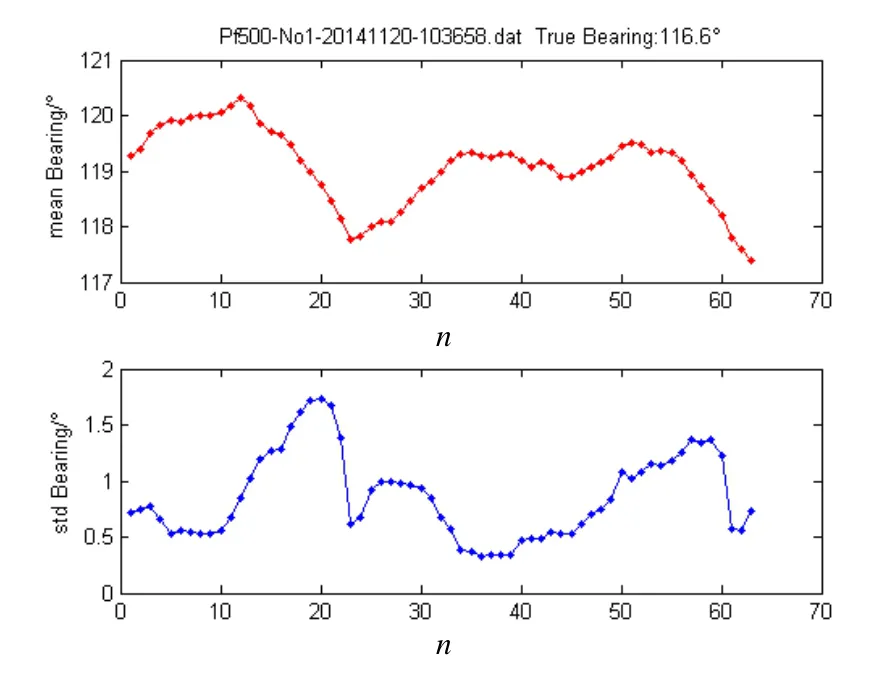
图4 本文算法方位估计精度统计
3 结论
本文针对非理想电声参数和动态海洋环境下对单矢量水听器方位估计的制约,提出电声特性补偿方法和矢量场振速信号复原方法,结合基于单声矢量传感器MUSIC算法,形成了单矢量水听器的目标测向方法,并进行了海试数据验证。研究表明本文提出的单矢量水听器测向方法方位估计精度在 2°以内,可有效实现目标方位的高精度估计,具有工程实用价值。
[1]HAWKES M, NEHORAI A. Acoustic vector-sensor processing in the presence of a reflecting boundary[J]. IEEE Trans. Signal Processing, 2000, 48(11):2981-2992.
[2]林旺生. 基于矢量声场的水下被动探测与定位技术[D].哈尔滨工程大学, 2013.
[3]梁国龙, 张锴. 单矢量水听器的高分辨方位估计方法.兵工学报, 2011, 32(8):986-990.
[4]HAWKES M, NEHORAI A. Wideband source localization using a distributed acoustic vector-sensor array[J]. IEEE Trans.Signal Processing, 2003, 51(6):1479-149l.
[5]于洪涛. 浮标基单矢量水听器测向位技术[D]. 哈尔滨工程大学, 2013.
[6]NAGATA S, FURIHATA K, WADA T. A three-dimensional sound intensity measurement system for sound source identification and sound power determination by in models[J].JASA, 2005, 118(5):3139-3144.
猜你喜欢
电声技术(2022年3期)2022-04-28 00:22:50
幼儿园(2021年12期)2021-11-06 05:10:20
应用科技(2020年1期)2020-06-18 02:02:36
电子制作(2016年19期)2016-08-24 07:49:34
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
西部广播电视(2015年17期)2016-01-18 03:46:22
西部广播电视(2015年8期)2016-01-16 03:45:31
声学技术(2014年1期)2014-06-21 06:56:34