变电站智能运检关键技术及应用
2018-01-16 05:08何育勇谢齐家吴传奇
湖北电力 2017年11期
汪 洋,刘 帆,汪 涛,曾 国,张 海,何育勇,陈 隽,谢齐家,吴传奇
(1.国网湖北省电力公司,湖北 武汉430077;2.国网湖北省电力公司电力科学研究院,湖北 武汉430077;3.国网湖北省电力公司黄石供电公司,湖北 黄石 435000)
0 引言
“十三五”期间,电网规模将迎来爆发式增长,电网运行安全性要求也越来越高,依靠人力为主的传统运维检修模式导致运维能力提升有限,已经无法满足迅猛增长的电网运维工作需求;同时传统的运维检修模式无法实现资源的优化配置,运检资源分配随意性较大,制约了运检效率的进一步提高。通过现代科技提升变电站运检智能化水平[1],可有效提升设备可靠性和提高劳动生产率,是提高电网安全稳定和缓解人力资源紧张的有效手段。
当前智能运检技术还未形成统一标准[2],各地所采用的技术存在过于超前无法落地应用或过于落后效果欠佳的现状,本文在深入分析当前运检技术的基础上,提出了适合于当前工业发展水平的智能运检模式,并解决了其中的几个核心问题,形成了成熟的解决方案,即采用移动作业和巡视机器人提高巡视智能化水平,采用在线监测技术提高设备状态监测智能化水平,采用远方顺控操作提高操作智能化水平,采用检修机器人提高检修智能化水平。实际应用效果表明,本文提出的智能运检方案,能有效提升设备状态掌控水平,提高电网安全稳定性,同时也能大幅提高现有劳动生产率,缓解生产部门人员紧张和任务繁重的现状,具有重要的理论意义和工程价值。
1 操作智能化
采用远方顺控技术提高变电站设备操作的智能化水平,可一键化实现多个操作,在国内外首次采用压力传感技术实现隔离开关分合闸位置的“双确认”,同时实现了操作票的模块化编辑。
1.1 隔离开关分合闸状态的“双确认”
敞开式隔离开关在操作过程中的可靠性相比短路器要低,进行操作时需要操作人员到现场核实隔离开关的真实位置,工作量较大,采用“双确认”技术可提高对隔离开关位置状态判断的准确性,从而代替操作人员到现场核实隔离开关位置。
隔离开关的分合闸状态,通常一路信号来自后台遥信信号(来源于辅助开关),另一路信号可通过在断路器或刀闸传动机构上安装微动开关来获取,这种“双确认”技术已应用较多,但在刀闸传动机构上安装微动开关仍然属于间接判断刀闸分合闸位置,不满足安规关于两路信号应该非同源的要求,本文研究刀闸分合闸状态的直接检测方法,即在触头位置安装压力传感器测量合闸时的压力,通过压力来直接反映隔离开关的分合闸状态(见图1)。压力传感器同时具有温度测量功能,可用于触头温度的在线监测。
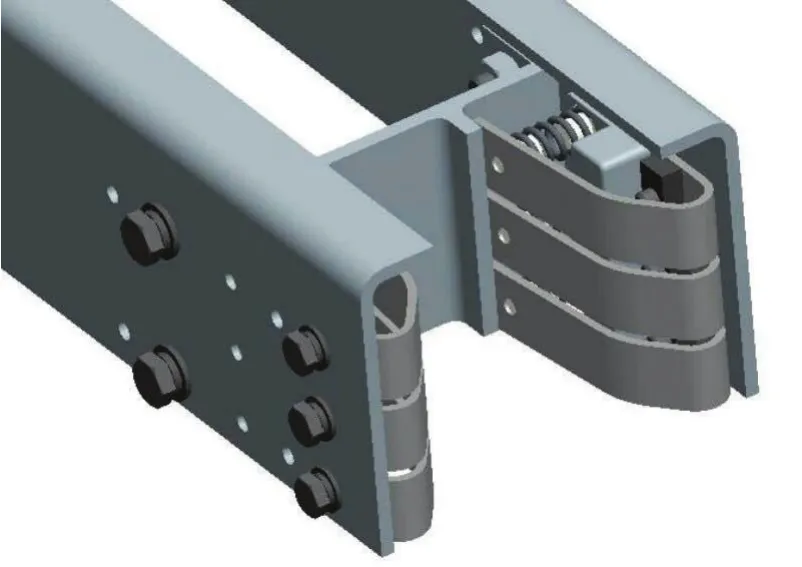
图1 隔离开关分合闸位置监测Fig.1 Position monitoring for disconnector
1.2 顺控方案
采取在调度控制中心实现顺控操作的方案:在控制系统中增加一个顺控模块,当需要进行远方顺控操作时,顺控模块调取站端存储的常用操作票,实现一键化操作,一次性完成多个操作步骤[3](见图2)。
对于常用操作票可固化在系统中,同时也可自行选择各种操作组合成所需要的操作票,操作前能够实现操作过程的自动模拟和五防的校验。

图2 顺控操作界面Fig.2 Interface of sequential control software
2 巡视智能化
2.1 巡视机器人
采用智能巡视机器人(见图3)提高巡视的智能化水平[4],可代替大部分人工巡视工作量,主要具有以下功能:
(1)具备可见光探头,能够进行可见光视频录制和传输,同时具有智能识别系统,能够识别表计读数、刀闸实际位置等;
(2)具备红外探头,能够实现设备的红外测温及过热报警;
(3)自动定位功能,根据需求到达指定位置,如在断路器操作时自动到达相应位置进行监视;
(4)具备声音识别功能,能够识别设备异常声响。

图3 智能巡视机器人Fig.3 Smart inspector robot
2.2 手持智能巡检仪
研发了手持智能巡检仪(见图4),实现了人工特殊巡视和带电检测工作的智能化[5],主要具有以下功能:
(1)具备与国网PMS2.0通信权限;
(2)可与红外成像测温、开关柜局放等带电检测装置实现无缝连接,通过无线网络将带电检测数据传输至内网智能运检系统,减少人工录入工作量;
(3)内预置标准数据记录模板,方便记录巡视数据;
(4)可与红外镜头高度融合,实现红外成像温仪的小型化。
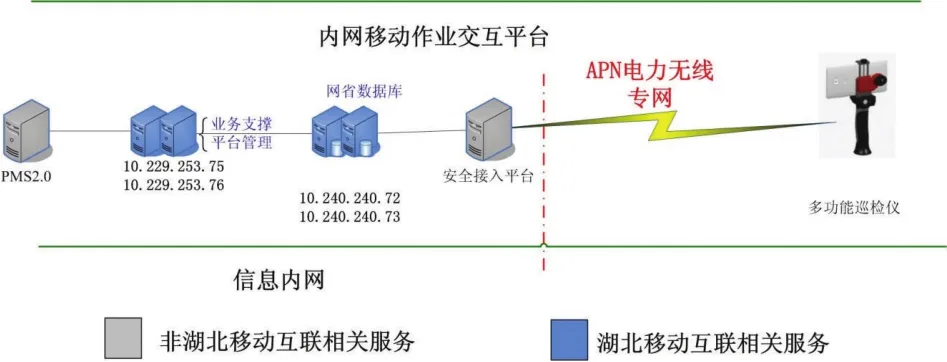
图4 手持智能巡检仪架构Fig.4 Framework of handheld smart inspector instrument
3 监测智能化
3.1 在线监测装置
选取目前主流的在线监测技术[6],包括红外在线测温、变压器油中溶解气体在线监测、变压器局部放电在线监测、变压器铁芯电流在线监测、变压器分接开关在线监测、隔离开关触头压力及温度在线监测、开关柜内部在线测温、开关柜局部放电在线监测、避雷器在线监测、互感器在线监测、二次压板在线监测等,将检测数据集中传输至运检数据智能处理系统,采用数据挖掘、模式识别等人工智能算法开展对监测数据的分析,增强在线监测设备发现缺陷的能力,同时将发现的缺陷通过消息推送的方式发送至运维人员手中的智能终端上,实现状态监测的智能化。
3.2 大数据平台
研发了变电智能运检大数据平台[7],实现运检数据分析、预警的智能化(见图5、图6),具体功能如下:
(1)在运行、巡视、监测、检修和带电检测过程中产生的大量数据汇集至该系统,结合变电站三维模型直观、全面地进行展示;
(2)具备大数据分析功能,能够人工智能技术开展对数据的分析,预测潜在的缺陷;
(3)可向运维人员手持智能移动终端发送预警信息,同时也可通过手持智能终端访问系统数据。

图5 大数据平台数据源Fig.5 Data source of big data platform

图6 数据的三维可视化展示Fig.6 3D visualization display of data
4 检修智能化
4.1 带电检修机器人
研发了带电检修机器人(见图7)[8],带电检修机器人具有如下功能:
图7 带电检修机器人Fig.7 Design drawing of live-overhaul robot
(1)可夹持带电作业工具(如遥控扳手、断线钳、压接钳等),进入狭小空间进行安装、拆卸连接件,安装引线等带电作业任务;
(2)绝缘机械臂可夹持检测设备进入狭小空间在线检测(如局部放电检测、绝缘子探伤、摄像头等);
(3)可开展绝缘子清扫、喷涂RTV、憎水性检测等带电作业工作。
4.2 自愈式发热缺陷处理
开展了记忆合金垫片应用研究[9],在以螺栓连接的高压导体部位,采用记忆合金制成的螺栓垫片(形变温度为60℃),该垫片具有随温度变形的特性,当连接部位发热导致温度升高时,垫片变形弯曲,导致螺栓压紧力增大,接触电阻减小,发热量减小,温度降低(见图8、图9)。

图8 记忆合金垫片形状(原始、紧固后、发热后)Fig.8 Shape of memory alloy gasket(original,after fastening,after heat)

图9 记忆合金垫片安装位置Fig.9 Installation position of memory alloy
5 应用效果
通过开展研究和应用,可初步实现变电站巡视智能化、操作智能化、监测智能化、检修智能化及数据分析智能化,以此推进智能运检技术对生产的促进和提升作用,项目的落地将大大提升设备状态监测水平,增强设备缺陷和故障的预判、预知、预警、预控能力,提高电网安全稳定性,同时也将提高现有劳动生产率,缓解生产部门人员紧张和任务繁重的现状。
(1)提高设备可控、在控能力
采用设备状态智能监测及数据智能分析技术,增强了提前发现设备缺陷的能力,减小了设备故障对电网运行稳定性的影响;采用带电检修机器人和发热缺陷自愈处理技术,以前需要停电处理的缺陷可以进行带电处理,对于单个缺陷,根据其处理复杂程度,可以减少停电时间数小时至数天。
(2)提升工作效率,减少运维成本
采用远方顺控技术将大幅提升劳动效率,如涉及3个及以上变电站的倒闸操作时,采用现场操作方式约需3台车、3个司机、6个操巡队员,路上需耗费大量时间,实施远方顺控操作,人员不需要到现场,大大减少了操巡人员工作量,节省了人力、物力、财力;采用巡视机器人,可代替日常人工巡视任务,减少了人工及运维成本。
5 结论
本文提出的变电智能运检模式,紧密贴合生产一线需求,采用了大量现代科技手段,并研究解决了核心关键技术,对提升设备状态掌控水平、提高电网安全稳定性和大幅提高现有劳动生产率具有重要的理论意义和工程价值。
(References)
[1]刘兆燕,张璞,刘庆时,等.未来科技城智能电网总体方案研究[J].电气应用,2013(S1):134-137.LIU Zhaoyan,ZHANG Pu,LIU Qingshi,et al.Research on general planning of future technology city power grid[J].Electric Apply,2013(S1):134-137.
[2]刘涛,代曙光.输电线路智能运检工作平台研究[J].机电信息,2012(15):16-17.LIU Tao,DAI Shuguang.Smart platform for maintenance and overhaul of electrical transmission line[J].Electromechanical Information,2012(15):16-17.
[3]汤国文,黄景婧,张灿峰,等.智能变电站顺控操作逻辑编制应用探讨[J].无线互联科技,2015(23):137-139.TANG Guowen,HUANG Jingjing,ZHANG Canfeng,et al.Discussion on the application of intelligent substation control operation logic[J].Wireless Internet Technology,2015(23):137-139.
[4]毛强.智能机器人在变电站中的应用[J].中国高新技术企业,2013(32):42-43.MAO Qiang.Apply of smart robot in substation[J].High and New Technology of China,2013(32):42-43.
[5]冯伟东.基于物联网射频技术的电网移动巡检作业关键技术研究[J].电气应用,2013(S2):311-315.FENG Weidong.Research on key technology of mobile operation for power gird based on radio-frequency technique of things internet[J].Electric Apply,2013(S2):311-315.
[6]曲朝阳,熊泽宇,颜佳,等.基于Spark的电力设备在线监测数据可视化方法[J].电工电能新技术,2016,35(11):72-80.QU Chaoyang,XIONG Zeyu,YAN Jia,et al.Data visualization for online monitoring of power equipment based on spark[J].New Technology of Electric and Power,2016,35(11):72-80.
[7]方巍,郑玉,徐江.大数据:概念、技术及应用研究综述[J].南京信息工程大学学报:自然科学版,2014,6(5):405-419.FANG Wei,ZHENG Yu,XU Jiang.Big data:conceptions,key technologies and application[J].Journal of Nanjing University of Information Science&Technology:Natural Science Edition, 2014,6(5):405-419.
[8]郑盼龙,迟冬祥.电力系统中机器人的研究现状与展望[J].上海电机学院学报,2013,16(6):347-353.ZHENG Panlong,CHI Dongxiang.Research status and prospect of robots for electrical power systems[J].Journal of Shanghai Dianji University,2013,16(6):347-353.
[9]陈天翔,方晓临,苏晓艺,等.记忆合金垫片在电力设备安全和节能中的应用试验研究[J].武汉大学学报:工学版,2014,47(4):494-497.CHEN Tianxiang,FANG Xiaolin,SU Xiaoyi,et al.Experimental research on application of memory alloy spacer to power device security and energy saving[J].Engineering Journal of Wuhan University,2014,47(4):494-497.
猜你喜欢
青海电力(2021年2期)2021-07-21
农村电气化(2021年7期)2021-07-19
石油化工设备(2021年1期)2021-01-20
中国交通信息化(2019年5期)2019-08-30
能源(2018年8期)2018-09-21
能源(2017年11期)2017-12-13
山东工业技术(2016年15期)2016-12-01
中华骨与关节外科杂志(2016年3期)2016-05-17
科技视界(2015年18期)2015-12-30
橡胶工业(2015年8期)2015-07-29