基于单片机的无线遥控电动叉车控制系统设计
2018-01-06 12:24:42刘傲
电子设计工程 2017年23期
刘傲
(哈尔滨工程大学信息与通信工程学院,黑龙江哈尔滨 150001)
基于单片机的无线遥控电动叉车控制系统设计
刘傲
(哈尔滨工程大学信息与通信工程学院,黑龙江哈尔滨 150001)
采用智能电机功率驱动芯片和单片机上下位机的控制方式,设计了一种小型无线遥控电动叉车的控制系统,介绍了控制系统的组成和原理实现以及有关的器件选型,遥控电路,电机驱动电路和升降电机电路的硬件设计和软件设计,控制系统操作方便、响应迅速、叉车运行平稳。
无线遥控;电动叉车;控制系统;单片机
叉车是指对托盘货物进行装卸、堆垛和短距离运输作业的各种轮式搬运车辆。叉车按动力源可分为内燃叉车、电动叉车和手动叉车等,按操作方式可分为方向盘式、遥控式和手动推拉式等。
遥控电动叉车由底盘、门架、电池和遥控控制系统组成。底盘是叉车的基本骨架,是叉车实现运动功能的基础,底盘包含底盘框架、前后轮、刹车、配重和驱动电机等部分,驱动电机主要实现叉车的前进、后退和转弯等功能;门架是叉车完成叉子升降的基本框架,包含提升电机、升降框架、叉子等部分;电池为叉车控制系统提供电源;遥控控制系统实现对叉车的遥控操控,远距离控制叉车的前进、后退、转弯、刹车、叉子上升、下降、叉车状态显示和报警等功能。
针对叉车的工作过程和实现的功能,文中设计了一种基于单片机的无线遥控电动叉车控制系统,从电机控制系统的组成、上下位机的开环控制方式及控制原理、遥控电路、电机驱动电路、升降电机电路和软件程序流程等方面进行了阐述与说明。
1 控制系统设计
叉车控制系统采用上位机和下位机的二级开环控制方式,上下位机均采用ATMEGA单片机,上位机用于按钮信息处理和向下位机发送各种命令及参数,同时对下位机传送来的叉车运行状态信息进行显示。下位机接收上位机指令,按照指令要求,执行相应的功能操作,控制叉车升降电机、驱动电机的运动和叉车的刹车与制动,同时将叉车运行状态回传给上位机。叉车控制系统框图如图1所示。

图1 叉车控制系统框图
控制系统主要由遥控电路和控制电路组成,遥控电路由按键、摇杆、单片机、液晶显示屏和无线收发模块以及天线等器件组成。单片机对控制叉车左右电机运动的摇杆电位器信号进行AD采样处理,按照通信协议,将串行通信信号发送给无线收发模块,无线收发模块通过高斯频移键控GFSK调制方式,将数据信息调制在434MHz的频率上通过棒状天线发送给下位机的控制电路。遥控电路组成框图如图2所示。

图2 遥控电路组成框图
控制电路主要由单片机、无线收发模块、天线、驱动芯片、继电器组等器件和重力传感器、直流电机以及电磁铁等部件组成。单片机收到遥控电路上位机指令后,对指令进行分析,按照指令类别,分别对左轮/右轮驱动电机进行前进/后退的PWM控制;通过电磁铁对电机进行刹车/释放控制;通过对继电器组高低电压切换控制升降电机的运行速度;通过对重力传感器的信号采样,完成叉车的称重处理。单片机将所有的处理状态和结果通过无线收发模块回传给上位机进行显示。控制电路组成框图如图3所示。
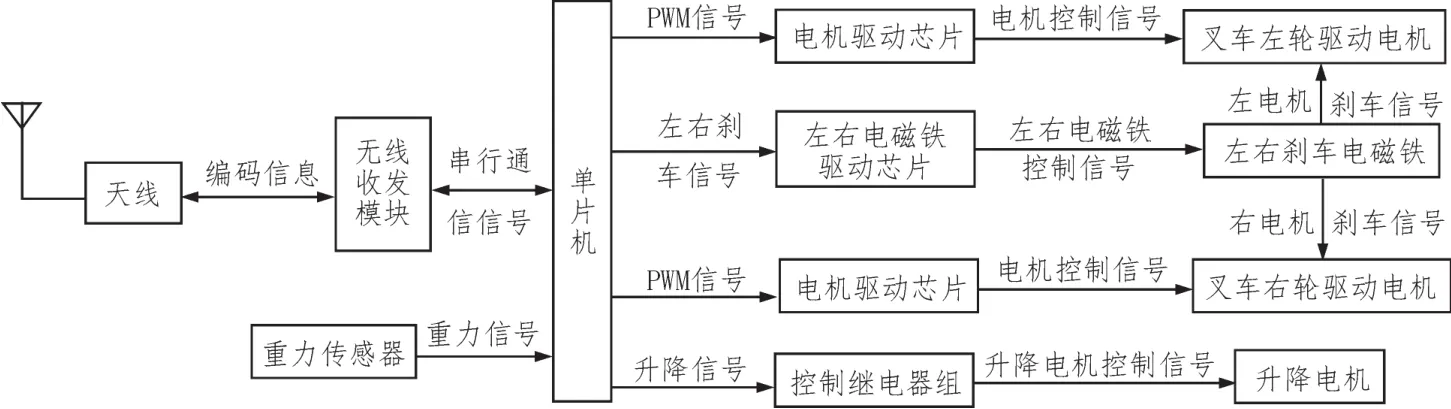
图3 控制电路组成框图
叉车在实际运行过程中,经常需要转弯、换向、微动。为增加操作的灵活性,叉车左、右轮驱动电机分别单独进行控制,转弯时,为减小转弯半径,左、右两侧的电机一个向前运动,另一个向后运动;叉车前进或后退时,两侧电机同时向前或向后运动。
2 硬件电路设计
2.1 遥控电路设计
遥控电路原理图如图4所示,单片机采用高档ATMEGA系列AVR单片机ATMEGA88,它是一种在系统可编程、功能强、高速度、低功耗、抗干扰性强的具有精简指令集的高性能8位单片机,片内含有8 K Flash程序存储器,1 280 Byte的SRAM,512 Byte的E2PROM等。
收发模块采用安美通公司的APC200A-43,该模块采用高效的循环交织检错编码技术,可以纠正24 bits连续错误,编码增益近3 dBm;在1 200 bps传输速度模式下,能够传输1 000 m的距离;具有512 Byte的数据缓冲区和UART/TTL、RS485及RS232等多种接口方式,选配灵活、嵌入方便。
字符液晶显示屏LCD1602是基于HD44780液晶芯片制作而成,HD44780内置了DDRAM、CGROM和CGRAM。DDRAM是显示数据RAM,用于寄存待显示的字符代码;HD44780内置的192个常用字符的字模,存于字符产生器CGROM中,8个允许用户自定义的字符产生RAM,即为CGRAM。
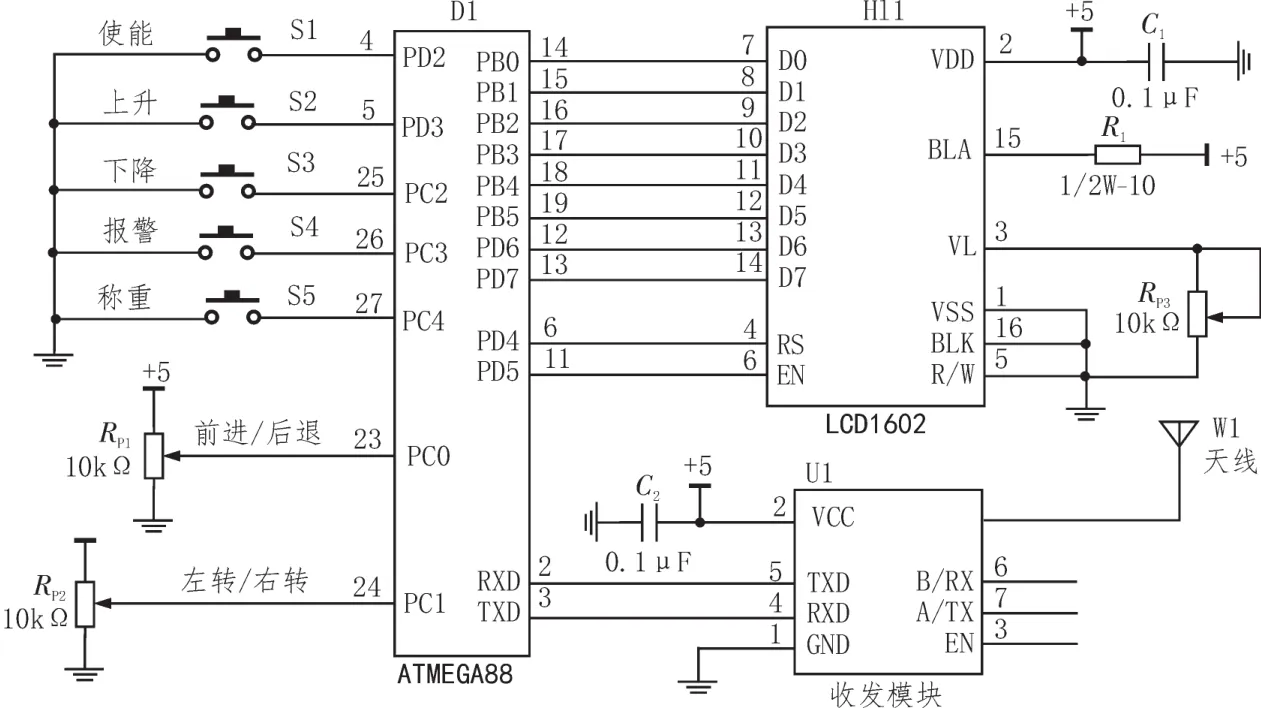
图4 遥控电路原理图
2.2 控制电路设计
控制电路设计主要包含左、右电机的驱动电路设计、电磁铁的驱动电路设计和升降电机的电路设计。左、右电机的驱动电路和电磁铁的驱动电路完全一样,均采用功率芯片BTN7971B进行驱动,升降电机的电路采用继电器组的设计方式。
2.2.1 驱动电路设计
电机驱动电路原理图如图5所示。电机驱动电路采用大电流、半桥、高集成的贴片智能功率芯片BTN7971B,它主要应用于电机驱动,BTN7971B内部带有一个P沟道的高边MOS场效应管、一个N沟道的低边MOS场效应管和一个集成驱动芯片,具有体积小、逻辑电平输入、电流诊断、斜率调节、死区时间产生和过温、过压、欠压、过流及短路保护的功能和特点,驱动电流可达70 A,Is引脚具有电流检测功能,正常模式下,从Is引脚流出的电流与流经高边MOS管的电流成正比。
两片BTN7971B组成一个全桥电机驱动电路,单片机以高低电平方式控制INH使能端,以PWM方式通过一个反向芯片74F14控制两片BTN7971B芯片的IN输入端的电平状态,实现电机的正、反向运行和停止等功能。

图5 电机驱动电路原理图
2.2.2 升降电机电路设计
升降电机电路原理图如图6所示。升降电路通过对继电器组的高低压切换完成对升降电机速度的控制,当控制电路收到遥控电路发送的升降电机动作指令后,继电器KA1先将12V电压送给控制电机运行的继电器KA2和KA3触点,单片机根据电机上升或下降要求分别对KA2和KA3进行控制,电机MD2加载的电压是12 V,电机以较慢的速度运行;延迟几秒后,KA1将24 V电压加到KA2和KA3的触点,此时电机MD2的输入电压变为24 V,电机以较块的速度运行。
升降电路采用高低压切换方式,该方式与直接采用高压启动方式相比,不仅负载提升流畅,而且能够减少继电器触点烧蚀粘连而产生的短路故障。
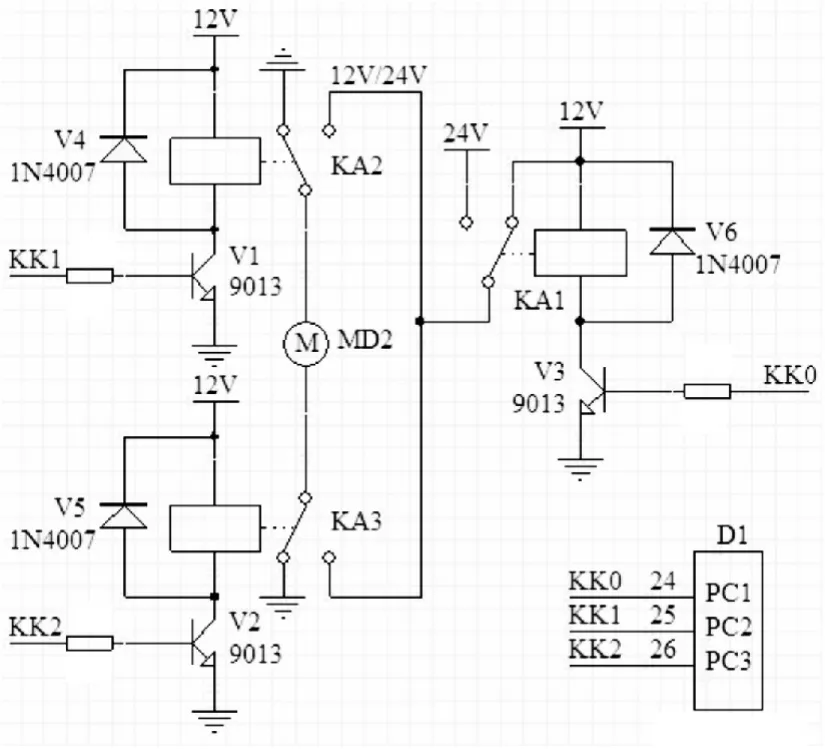
图6 升降电机电路原理图
3 软件设计
控制系统软件分为遥控和控制两部分,遥控程序主要功能是处理按键信号和对摇杆电位器信号进行AD采样处理,将数据以串行传输的方式发送给无线收发模块,无线收发模块将数据进行编码并通过天线发送给下位机的控制电路板,同时接收下机位控制电路板回传的需要显示的叉车状态或货物的重量信息。控制程序主要功能是通过无线收发模块接收上位机遥控电路板的指令,并对指令类型进行分析,根据指令类别,对驱动电机进行前进/后退的PWM控制,对电磁铁进行刹车/释放控制,对继电器组电压进行控制,调节升降电机的运行速度,对重力传感器进行货物重力信号采样和处理,最终将处理状态和结果通过无线收发模块回传给上位机遥控电路板进行显示。遥控程序流程图和控制程序流程图分别如图7和图8所示。

图7 遥控程序流程图

图8 控制程序流程图
4 结束语
分别从叉车电机控制系统的组成与功能、控制方式与控制原理、硬件电路设计和软件设计等方面介绍了基于单片机的无线遥控电动叉车控制系统设计,该控制系统以单片机为核心,采用上下位机的控制方式,上位机发送命令和参数,显示叉车状态;下位机接收上位机指令,控制叉车运行,叉车的前进、后退、转弯均采用PWM控制,叉车的升降采用高低压切换控制。
该叉车控制系统操作灵活、响应迅速、遥控距离远且叉车控制流畅,对同类型无线遥控电动叉车的控制系统设计有一定的参考和借鉴意义。
[1]佟云峰.单片机原理及应用[M].北京:机械工业出版社,2013.
[2]张平川,张勃.单片机原理与技术项目化教程[M].哈尔滨:哈尔滨工程大学出版社,2011.
[3]席志红.电路分析基础[M].哈尔滨:哈尔滨工程大学出版社,2016.
[4]周斐.电工技术[M].哈尔滨:哈尔滨工程大学出版社,2010.
[5]谭浩强.C程序设计[M].4版.北京:清华大学出版社,2010.
[6]郭天祥.新概念51单片机C语言教程[M].北京:电子工业出版社,2009.
[7]侯殿有.单片机C语言程序设计[M].北京:人民邮电出版社,2010.
[8]APC200A多通道微功率嵌入式无线数传模块[EB/OL].http://www.appcon.com.cn/uploads/soft/20150316/APC200A-43_R1.60_CH_ORI.pdf.
[9]朱华光.浅议LCDl602的编程技巧[J].电脑知识与技术,2010,6(18):4980-4982.
[10]周祖茗,王名发,周祖芬.液显模块LCD1602的接口设计及编程技巧[J].中国科技纵横,2010(14):150-151.
[11]何少佳,史剑清,王海坤.基于AT89S51单片机的直流电机控制系统设计[J].装备制造技术,2013(8):21-23.
[12]茹占军,谢家兴.基于AT89S52单片机直流电机调速系统的设计[J].软件导刊,2010,9(8):106-107.
[13]黄伟锋,吴丽宏.基于单片机的直流电机调速系统设计与仿真[J].机电工程技术,2010,39(12):74-76.
[14]陆雯.基于单片机的PWM控制直流电机转速方法[J].科技创新导报,2010(20):30-31.
[15]岳东海,颜鹏.直流电机PWM无级调速控制系统设计[J].价值工程,2010,29(2):135-136.
[16]侯攀峰,马辛玮,缪惠茹.基于AT89S51单片机直流电机PWM调速系统[J].科技与生活,2011(13):97-98.
[17]徐进,齐园园.一种语音控制车库门的实现方法[J].纺织高校基础科学学报,2008,21(3):368-371.
[18]杨进成,夏春蕾,戴曙光.基于LabVIEW的无线遥控汽车检测台设计[J].电子科技,2016(10):129-132.
Control system design of wireless remote control electric powered forklift based on single chip microcomputer
LIU Ao
(College of Information and Communication Engineering,Harbin Engineering University,Harbin150001,China)
Using the control mode of intelligent motor driver chip and upper and lower single chip microcomputer,designed a small wireless remote control electric powered forklift motor control system,this paper introduced the control system of component and principle to realize and the relevant parts selection,remote control circuit,motor drive circuit and lifting motor circuit of hardware and the software design.The control system was easy to operate,fast response and stable operation of the forklift.
wireless remote control;electric powered forklift;control system;single chip microcomputer
TN79
A
1674-6236(2017)23-0190-04
2016-10-09稿件编号:201610029
刘傲(1996—),男,湖北武汉人。研究方向:通信工程。
猜你喜欢
中国储运(2022年6期)2022-06-18 10:29:00
中国特种设备安全(2021年12期)2021-04-26 14:37:06
电子制作(2019年16期)2019-09-27 09:34:58
电子制作(2019年23期)2019-02-23 13:21:36
中国新技术新产品(2017年15期)2017-07-07 13:52:03
中国新通信(2017年4期)2017-04-10 11:26:47
中国储运(2017年4期)2017-04-08 08:36:53
广州大学学报(自然科学版)(2016年2期)2017-01-15 13:43:02
中国储运(2016年8期)2016-09-02 06:22:04
电源技术(2016年2期)2016-02-27 09:05:13