三维激光扫描技术在深基坑监测中的应用
2018-01-04 03:27许新海
城市勘测 2017年6期
许新海
(蚌埠市勘测设计研究院,安徽 蚌埠 233000)
三维激光扫描技术在深基坑监测中的应用
许新海*
(蚌埠市勘测设计研究院,安徽 蚌埠 233000)
随着城市的发展,深基坑工程非常普遍,在深基坑的开挖过程中,基坑监测是基坑安全的重要保障。文章介绍了三维激光扫描技术的基本原理以及精度影响分析,讨论了这项新技术相比于传统测量的优势。通过工程实例,说明了具体的扫描工作流程,对数据分析,得出监测结果,并与全站仪数据互相验证。最后提出了目前仍存在的一些问题以及对未来的展望。
基坑监测;三维激光扫描;三维模型
1 引 言
传统的测量技术手段难以表达复杂的空间三维数据,随着计算机技术与相关科学技术的发展,为空间数据获取提供了新的方法与手段。
三维激光扫描技术作为近年来新兴的一门测绘技术,该技术科可以快速高效地获取高密度的点云数据,无须和被测物体接触,并重建目标的三维模型。已在古建筑保护、考古测量、工业制造、结构测量、河道测绘、桥梁、建筑物地基测绘等方面得到广泛应用。
2 三维激光扫描的基本原理及精度影响分析
2.1 三维激光扫描的基本原理
三维激光扫描仪的主要构造是由一台高速精确的激光测距仪,配上一组可以引导激光并以均匀角速度扫描的反射棱镜。激光测距仪主动发射激光,同时接受由自然物表面反射的信号从而可以进行测距,针对每一个扫描点可测得测站至扫描点的斜距,再配合扫描的水平和垂直方向角,可以得到每一扫描点与测站的空间相对坐标。
XP=Scosβcosα
YP=Scosβsinα
ZP=Ssinβ
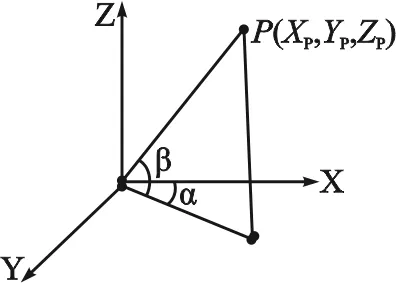
图1 扫描点坐标计算原理
如果测站的空间坐标是已知的,那么则可以求得每一个扫描点的三维坐标,从而获取三维点云数据。
2.2 精度影响分析
精度影响目前主要在以下几个方面:
(1)激光测距的影响。
激光测距信号在处理的各个环节都会带来一定的误差,特别是光学电子电路中激光脉冲回波信号处理时引起误差。以Z+F扫描仪为例,在近距离(10 m)处,可以达到 0.4 mm的测量精度,50 m处下降到 1.8 mm。
(2)扫描角的影响。
扫描角的影响包括激光束水平扫描角度和竖直扫描角度测量精度。扫描角度引起的误差是扫描镜的镜面平面角误差、扫描镜转动的微小震动、扫描电机的非均匀转动控制等的综合影响。尽管目前扫描仪的角度测量达到亚秒级别,但由于制造的误差,角度测量仍然不可忽视。
(3)目标物体反射特性的影响
激光测距依赖于目标物体的反射激光能量,在任何情况,反射强度都受物体表面反射特性的影响。由于物体表面反射特性的差异,将导致激光测距产生一定的误差。反射特性受物体的材质、粗糙程度,表面色彩等影响。
3 三维激光扫描技术在基坑监测中应用
3.1 工程简介:
某基坑工程位于城市商业区附近,基坑深度约 11 m,基坑侧壁安全等级为一级。基坑西侧现状为办公楼,其余为现状道路。选取基坑西北角边坡进行扫描,获取激光扫描数据,分析基坑的变形情况,同时与同期的全站仪监测结果对比分析。基坑局部的监测点分布如图2所示:
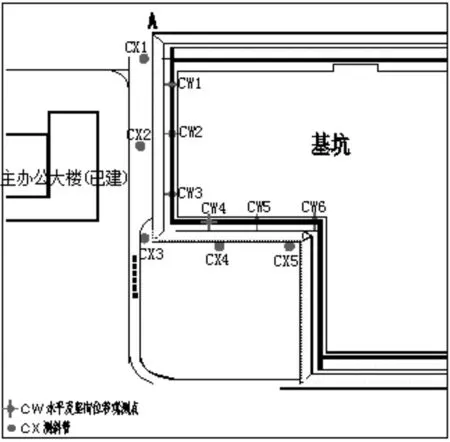
图2 基坑西北角监测点布置图
3.2 监测工作分以下几个步骤:
(1)基准点及监测点布设
根据基坑设计平面图及现场的实际情况,确定测站、标靶及监测点的分布。测站采用强制对中装置,减少对中误差。监测点利用强制对中装置,可以直接放入棱镜,全站仪进行测量,也可以通过转接头安上标靶使用,通过激光扫描仪进行扫描,做到一点两用。
标靶测量精度是三维点云精度的前提,我们利用Leica TCA2003全站仪(测角精度±0.5″,测距精度 1 mm+1 ppm),精确测定标靶的中心坐标,用于获取三维点云的绝对坐标。
(2)设站扫描
采用德国的Z+F IMAGER 5010C扫描仪,每两站之间至少有3个公共标靶可见,激光扫描时同步扫描标靶,用于数据后处理时两站之间的拼接。采用Super High分辨度对标靶进行局部扫描,用Middle分辨率进行基坑侧壁扫描,单站扫描时间约 10 min。
(3)点云数据处理
Z+F扫描获得的数据是带有三维坐标的点云数据,将扫描数据导入Z+F LaserControl软件,利用软件工具对点云过滤,删除多余数据,降低点云密度,提高后续处理的效率。点云过滤后进行点云拼接,利用两个标靶进行拼接,第三个标靶作为多余观测,进行平差计算,提高拼接精度。
拼接精度报告如图3所示:
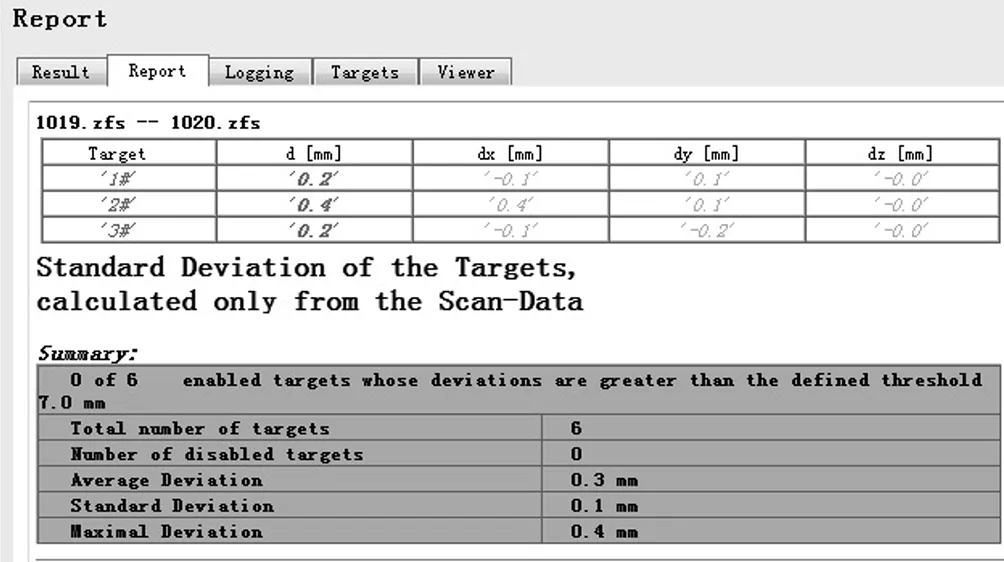
图3 拼接精度报告
由拼接精度报告可以看出三个标靶球在X、Y、Z三个方向上偏差以及总偏差。
平均偏差:0.3 mm,标准偏差:0.1 mm,最大偏差:0.4 mm,完全满足规范要求。
点云拼接完毕以后,对标靶的中心点进行拟合,输入全站仪测得的精确坐标,通过标靶中心点坐标将点云数据归化到工程坐标系中,获取绝对坐标的基坑点云数据,如图4所示。
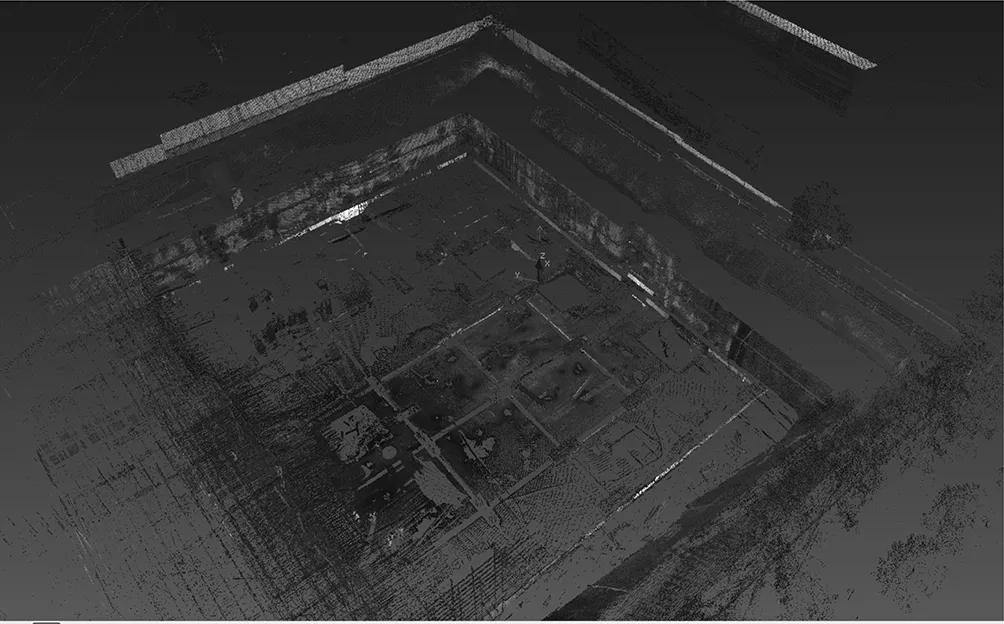
图4 基坑点云数据
(4)三维建模
将经过处理后的点云数据,导入三维建模软件,建立支护结构的三维模型,通过软件进一步对点云数据分析。
3.3 监测成果分析
(1)三维激光扫描仪扫描成果
历经3个月前后7次观测,初步得到基坑西北角支护结构的整体变形情况。选取8月25日,9月11日点云数据进行对比分析:(红色与绿色区分表示),如图5所示。
利用Geomagic软件将两期数据对比分析,通过不同颜色显示基坑边坡的整体位移情况,也可获取单点的位移,如图6所示。

图5 两期基坑混合点云数据

图6 基坑边坡表面位移图
可以看出基坑位移量均在2 mm~3 mm左右,与同期的测斜仪数据基本吻合,分析基坑支护结构基本稳定。
(2)三维激光扫描标靶坐标与全站仪棱镜坐标对比
选用安置在冠梁上CW1、CW3、CW6监测点9月11日观测数据作为分析对象,通过2种方法实测坐标较差均在 3 mm内,可以得出三维激光扫描坐标精度较高,可靠性好。
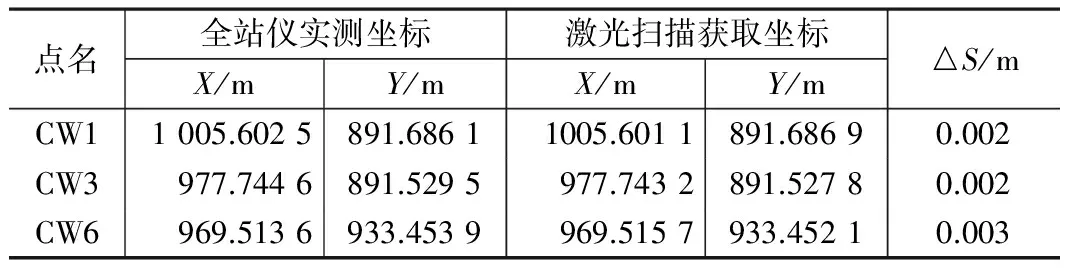
全站仪实测坐标与激光扫描坐标对比表 表1
4 结 论
通过以上分析,可以看出三维激光扫描技术获得的数据量大,变形量直观简洁,非接触测量的方式等有很大优势。对于中小型基坑危险区域完全可以代替全站仪进行基坑监测,保证监测人员的安全。对于大型基坑由于涉及多站拼接,精度很难保证。同时随着扫描距离的增加,精度也显著下降,难以达到监测精度,可以作为全站仪测量的一种补充与验证。另一方面,在扫描的过程中,施工工地遮挡的问题也比较突出,应该与传统测量方法共同作业,发挥各自的优势。
目前来看,三维激光扫描技术在测量领域的应用潜力还有待进一步开发利用,随着技术的发展,仪器价格的降低以及精度的提高,这一技术在变形监测中的应用会更加广泛。
[1] 徐进军,王海城,罗喻真等. 基于三维激光扫描的滑坡变形监测与数据处理[J]. 岩土力学,2010,31(7):2188~2191.
[2] 杨帆,董景利,薛伟等. 三维激光扫描技术及其相关软件在建模方面的应用[J]. 地矿测绘,2012,28(3):21~23.
[3] 王方建,习晓环,王成等. 地面激光扫描数据在建筑物重建中的研究进展[J]. 遥感信息,2014(6):118~124.
[4] 黄承亮,吴侃,向娟. 三维激光扫描点云数据压缩方法[J]. 测绘科学,2009,34(2):142~144.
[5] 徐进军,张毅,王海成. 基于地面三维激光扫描技术的路面测量与数据处理[J]. 测绘通报,2011(11):34~36.
Applicationof3DLaserScanningTechnologyinDeepFoundationPitMonitoring
Xu Xinhai
(Bengbu Geotechnical Engineering and Surveying Institute,Bengbu 233000,China)
With the development of the city,the deep foundation pit engineering is very common. In the process of deep foundation pit excavation,pit monitoring is an important guarantee for the safety of foundation pit. This paper introduces the basic principle of 3D laser scanning technology and the influence analysis of precision,and discusses the advantages of this new technology compared with the traditional measurement. Through the engineering example,the specific scanning workflow is explained,the data analysis is carried out,the monitoring result is obtained,and the data is verified with other data. Finally,some problems and prospects for the future are put forward.
the foundation pit monitoring;three-dimensional laser scanner;three-dimensional model
1672-8262(2017)06-87-03
P234
B
2017—10—30
许新海(1985—),男,工程师,主要从事城市测量技术工作。
猜你喜欢
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
工程与建设(2019年3期)2019-10-10
模具制造(2019年3期)2019-06-06
测绘工程(2018年3期)2018-03-20
测绘通报(2017年2期)2017-03-07
电测与仪表(2016年9期)2016-04-12
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
测绘学报(2015年4期)2015-01-14