
基于激光干涉仪的运动误差测量系统设计
2018-01-02 03:37李福新张志利
现代电子技术 2017年24期
李福新+张志利
摘 要: 对于运动误差测量系统中几何误差较大的问题,提出一种基于激光干涉仪的运动误差测量系统设计。设计的运动误差测量系统硬件由计算机、电气控制柜、电动机、激光干涉仪、同心仪等组成。软件系统引入一种测量数学模型,能够进行快速误差鉴别、行踪测量,通过测量模型的数据有效地避免了几何误差的出现,提高了运动误差测量系统测量的准确度。实验验证了基于激光干涉仪的运动误差测量系统的设计方案的有效性。
关键词: 激光干涉仪; 运动误差测量; 几何误差避免; 激光干涉
中图分类号: TN911?34 文献标识码: A 文章编号: 1004?373X(2017)24?0178?03
Abstract: Aiming at the large geometric error existing in the motion error measurement system, a design of the motion error measurement system based on laser interferometer is proposed. The hardware of the designed motion error measurement system is composed of computer, electric control cabinet, motor, laser interferometer, concentric device, etc. A mathematical model of measurement is introduced into the software system, which can quickly identify the error and measure the track, effectively avoid the geometric error by means of the data of the measurement model, and improve the measurement accuracy of the motion error measurement system. The effectiveness of the design scheme of the motion error measurement system based on laser interferometer was verified with experiment.
Keywords: laser interferometer; motion error measurement; geometric error avoiding; laser interference
随着精密加工的要求不断增加,对于大型精密部件,比如电子元件、电路元件以及液晶面板等都已经可以进行μm甚至是nm级别的精加工。随之而来,对于进行精加工过程使用的运动误差测量系统的要求也更加的精确。为了满足高精度的测量需求,使用光学仪器或者是元器件对精加工过程进行系统的测量是非常有效的。但是,大多数的运动误差测量系统都会受到各种应力、测量环境、几何尺寸、运动轨迹等因素的影响,造成一定的测量误差,特别是几何误差是所有系统中最难以避免的。所以在测量过程后还需要一定的误差排除。为了有效地避免由于各项情况特别是几何形状带来的误差[1],使用激光干涉仪与运动误差测量系统相融合进行有效的检测,能够有效地避免误差的产生,特别是对几何误差最有效果。
根据上述情况,本文提出了一种基于激光干涉仪的运动误差测量系统设计方案,这样可以有效地避免几何误差带来的测量精度不准确的情况[2?3]。
1 测量误差问题
对于运动测量过程中产生的误差形式有很多,其中最主要的是几何误差,还包括:应变力误差、热变形误差、运动轨迹误差等。这些误差对于测量结果影响最大的是几何误差,有时候可以达到45%以上。
传统的运动误差测量系统进行检测时是无法避免的,经常会使用大量的误差修正系统进行修正,这样严重地影响了测量的精确度。激光干涉仪是一种高精度的光学测量仪器,其测量量程大,并且可以进行承载式的测量,可以有效地避免由于形状改变造成的误差。为此,本文把激光干涉仪与运动误差测量系统进行有效的融合,对于几何误差使用激光干涉仪进行检测和校准,这样就可以消除误差提高测量的精度[4?5]。
2 利用激光干涉仪的运动误差测量系统设计
本文设计的基于激光干涉仪的运动误差测量系统中,把激光干涉仪分组进行安装,固定在基座的定位器上,在测量过程中根据测量的尺寸需要进行一定的调整,同时自动校准装置可以根据现有的激光干涉仪进行配比[6]。本文设计的基于激光干涉仪的运动误差测量系统,在测量过程中,激光干涉仪可以步进式的进行测量,保证在每一步的测量过程中,能够有效地避免测量误差的产生,同时保证测量的精准度[7]。
2.1 线性方程组优化
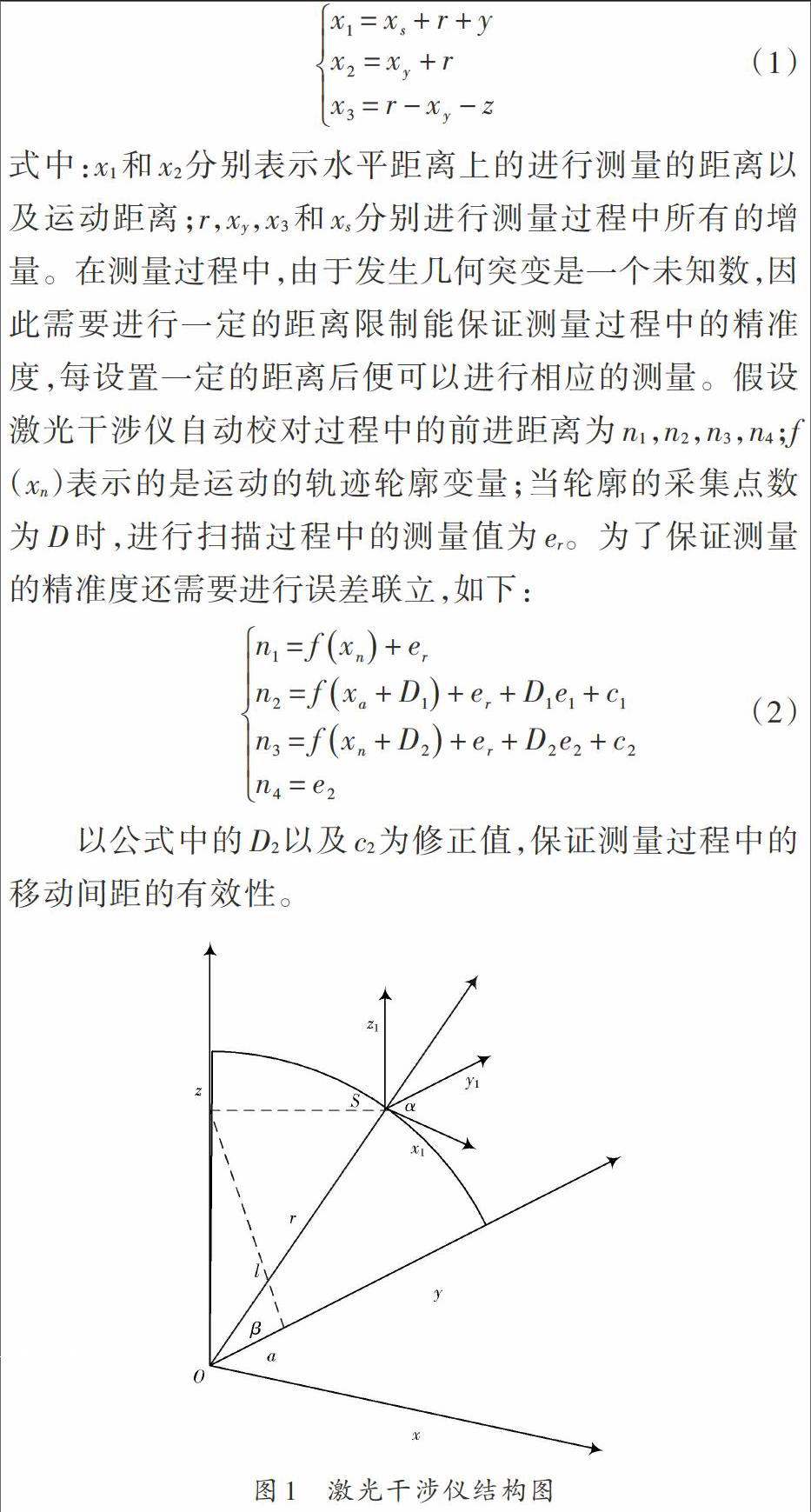
基于激光干涉仪的运动误差测量系统在进行测量过程中,为了测量精准度可以进行联立方程组,同时可以根据方程组求解,定义方程组如下:
式中:x1和x2分别表示水平距离上的进行测量的距离以及运动距离;r,xy,x3和xs分别进行测量过程中所有的增量。在测量过程中,由于发生几何突变是一个未知数,因此需要进行一定的距离限制能保证测量过程中的精准度,每设置一定的距离后便可以进行相应的测量。假设激光干涉仪自动校对过程中的前进距离为n1,n2,n3,n4;f(xn)表示的是运动的轨迹轮廓变量;当轮廓的采集点数为D时,进行扫描过程中的测量值为er。为了保证测量的精准度还需要进行误差联立,如下:
以公式中的D2以及c2为修正值,保证测量过程中的移动间距的有效性。
2.2 引用最小二乘算法
在测量过程中,假设存在一定几何误差,根据误差存在的随机性和几率,以及误差的独立性。可以使用线性最小二乘法得到矩阵序列为:
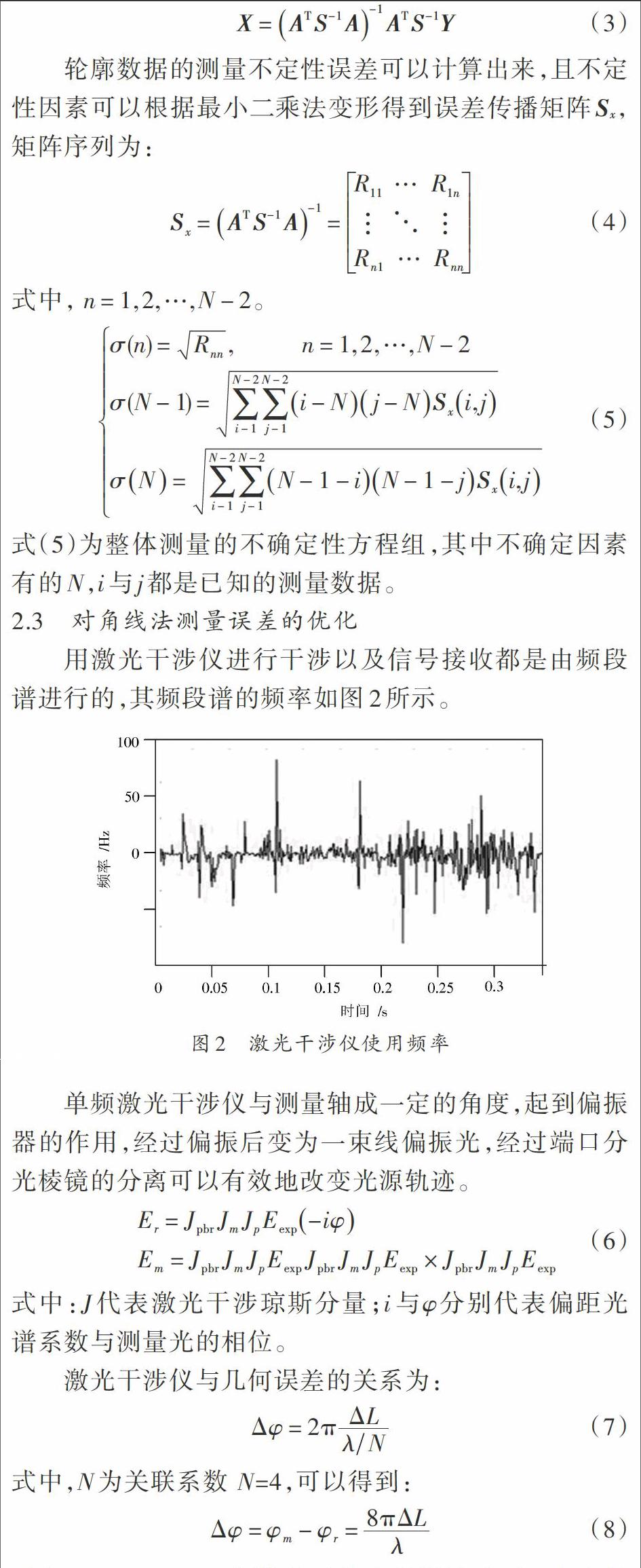
轮廓数据的测量不定性误差可以计算出来,且不定性因素可以根据最小二乘法变形得到误差传播矩阵Sx,矩阵序列為:
式(5)为整体测量的不确定性方程组,其中不确定因素有的N,i与j都是已知的测量数据。
2.3 对角线法测量误差的优化
用激光干涉仪进行干涉以及信号接收都是由频段谱进行的,其频段谱的频率如图2所示。
单频激光干涉仪与测量轴成一定的角度,起到偏振器的作用,经过偏振后变为一束线偏振光,经过端口分光棱镜的分离可以有效地改变光源轨迹。
3 试验验证
为了验证本文设计的基于激光干涉仪的运动误差测量系统的有效性,设计了对比试验。对一个矩形的工件精加工后,先使用传统的运动误差测量系统进行测量,然后使用本文设计的利用激光干涉仪的运动误差测量系统进行测量,测量结果如图3,表1所示。
根据图3可以看出,本文设计的利用激光干涉仪的运动误差测量系统能够有效地提高准确率,避免了几何误差,通过表1可以看出误差率明显下降。
4 结 语
本文利用激光干涉仪的运动误差测量系统能有效地避免误差的产生,解决了传统的运动误差测量系统误差率高的难题。希望能够为运动误差测量系统的改进提供理论依据。
参考文献
[1] 赵荣丽,陈新,李克天.基于激光干涉仪的垂直轴宏微复合平台直线度测量及误差分析[J].机械设计与研究,2015(3):139?142.
[2] 尹志生,李友如,李佩玥,等.高精度六维激光测量系统误差补偿算法研究[J].电子测量与仪器学报,2016,30(8):1275?1281.
[3] 牛海莎,牛燕雄,刘宁,等.外腔镜非线性运动对激光回馈应力测量系统精度的影响及修正[J].物理学报,2015,64(8):183?188.
[4] 陈怡霖,李應,任靖日,等.基于激光干涉的五轴并联机床误差快速测量与补偿研究[J].黑龙江科技信息,2014(21):118?119.
[5] 管荣根,顾玲.基于误差修正的惯性动态测量系统的试验研究[C]//先进制造技术高层论坛暨制造业自动化与信息化技术研讨会.北京:制造业自动化杂志社,2007:78?79.
[6] 董晨松,穆玉海.用激光干涉仪测量三坐法测量机的动态特性[J].天津大学学报(自然科学与工程技术版),1998(5):621?626.
[7] 宋莹.全息光栅曝光系统干涉条纹静态及动态相位锁定技术研究[D].长春:长春光学精密机械与物理研究所,2014.
