步进光电式垂线坐标仪实用化应用实践
2018-01-02 08:30:21谢红兰
水利信息化 2017年6期
刘 波 ,谢红兰 ,李 东
(1. 辽宁省观音阁水库管理局,辽宁 本溪 117100;2. 江苏南水科技有限公司,江苏 南京 210012;3. 水利部水文水资源监控工程技术研究中心,江苏 南京 210012)
步进光电式垂线坐标仪实用化应用实践
刘 波1,谢红兰2,3,李 东2,3
(1. 辽宁省观音阁水库管理局,辽宁 本溪 117100;2. 江苏南水科技有限公司,江苏 南京 210012;3. 水利部水文水资源监控工程技术研究中心,江苏 南京 210012)
介绍步进光电式垂线坐标仪的关键结构、工作原理及计算方法,结合实际工程应用,通过对运行自动化系统 17 a 来的监测数据进行分析及与人工比测数据进行对比,充分说明该仪器具有测量精度高、稳定性好、测值可信度高等优越性能,完全替代人工测量,实现大坝安全自动监测的实用化,是大坝安全监测中垂线自动监测的最佳选择。
垂线坐标仪;步进光电式;安全监测;人工比测;资料分析;实用化
0 引言
垂线坐标仪适用于大坝、船闸等水工建筑物的水平位移及挠度监测,按仪器的测量原理可分为步进、CCD 光电式,差动电感式、电容式等几种[1]。步进光电式垂线坐标仪是利用机械传动机构驱动光电探头扫描垂线完成对被测物理量测量的传感器,与被测对象实现真正非接触,具有测量精度高,稳定性好,测值可靠,抗外界干扰能力强等特点,已在实际工程的安全监测中大量推广应用。
1 结构
步进光电式垂线坐标仪主要由步进电机驱动的机械传动和光电探头感应的测量两部分装置组成[2]。机械传动装置包括步进电机、精密丝杆、滑动导杆、仪器基座等部件,测量装置包括双基准杆、光电探头等部件,同时为了保证仪器有相对良好的工作环境,仪器内部设置了温控加热体,这些部件都布置在高强铝合金外壳内。关键部件如下:
1)步进电机。是由电脉冲信号控制传动机构移动的执行部件,具有转动步距角小,定位精度高,误差不积累,运行稳定可靠等优点。
2)传动机构。传动机构由螺杆、螺旋副、导杆等组成,螺杆为螺距为 2.5 mm 的高精度不锈钢梯形螺杆;螺杆内配套的螺旋副设有压簧,以消除运动中的间隙误差;螺杆两侧均设有导杆,分别安装了导向直线和滚动轴承,保证探头能平稳运行。
3)双基准杆。在仪器底板上设置了具有专利技术的双基准杆装置,基准杆永久固定在仪器底板上,第 1 根基准杆是每次测量的起始点,2 根基准杆之间的距离即基准长度用于测值自校,确保测量结果的准确、可靠。
4)光电探头。采用 U 型结构,内部设计了 2 组光电管,一组与探头前进方向垂直,另一组与其成45° 夹角。光电探头随传动机构运行 1 个行程,可同时测出垂线在 X,Y 2 个坐标轴方向上距第 1 个基准杆的距离和基准杆之间的距离,经计算得出垂线的位移量。探头的每组光电管采用具有专利技术的双照准电路,当一套照准电路发生故障,另一套自动投入使用,有效提高了仪器测量的可靠性。
2 工作原理
在专用测量设备的控制下,步进电机驱动传动机构运转,并通过螺旋副带动光电探头运动,探头内 2 组光电照准电路依次扫描第 1 根基准杆、垂线线体及第 2 根基准杆,并以第 1 根基准杆为起始点,根据 X 和 Y 2 个方向上起始点分别到垂线线体和第 2 根基准杆所得到的步进电机转动的步数,经过数据处理与计算,便可得到垂线在该测点的 X 和Y 2 个方向的坐标值和基准杆之间的长度,不同时段2 次测值之差即为此时段该测点的位移变化量,基准长度作为不变量可用作仪器自检和测值自校。工作原理如图 1 所示。

图 1 步进光电式垂线坐标仪工作原理图
3 工程应用
安徽省陈村水电站枢纽建筑物主要由混凝土重力拱坝、坝顶左右溢洪道、坝内泄洪底孔和中孔、坝内发电引水管、坝后式厂房和右岸过木设施等组成[3],最大坝高 76.3 m,顶宽 8 m,坝顶弧长 419 m,坝顶高程 126.3 m,共分 28 个坝段。
1997 年,陈村水电站对大坝安全自动监测系统(以下简称自动化系统)进行自动化更新改造,监测设施和测点布置进一步得到改进和完善,并对主要监测项目如大坝垂线、内观仪器等实现自动监测。在大坝变形监测项目中,选择 17 条垂线(6 条正垂、11 条倒垂)共计 19 个测点,采用 19 台STC-50 型步进光电式垂线坐标仪,实现大坝径向和切向变形的自动监测。变形监测测点布置如图 2所示。
在陈村水电站自动化系统试运行期间,为检验自动化系统运行的可靠性和监测数据的准确性,共同制定了自动化系统试运行期间的考核和验收大纲。垂线采用光学垂线坐标仪同步进行人工比测,每周人工比测 1 次,比测周期为 1 a,人工测量和自动化监测的数据按其各自 2 倍均方差检验,自动化系统数据采集缺失率要求不大于 1.00%。经过 1 a 多的试运行,陈村水电站自动化系统通过了严格的考核试验,垂线坐标仪的数据缺失率为 0.61%,测量精度平均为 0.05 mm[4]。1999 年 9 月,安徽省电力工业局组织对该项目进行验收鉴定,对自动化系统进行现场测试,自动化系统运行情况完全满足考核条件,为实现陈村大坝安全监测的无人值班、少人值守创造了条件,该项目顺利通过了验收。
为进一步检验采集数据的准确性和可靠性,陈村水电站加强内部管理,根据自动化系统运行情况,制定了逐步减少比测次数的人工比测的方案,并按试运行期的考核标准进行考核。随着自动化系统的可靠运行,人工比测周期逐步减少,1999 年每周 1 次,2000—2013 年每月 1 次,2014—2015 年每2 月 1 次。经过长达 17 a 的自动化系统采集与人工比测,自动化系统运行可靠,没有发生系统故障,监测数据的准确度和缺失率均达到考核要求,积累了大量准确可靠的监测数据[5]。

图 2 垂线测点下游立面布置图
4 成果分析
为进一步了解步进光电式垂线坐标仪的长期运行情况,以长期环境湿度在 90% 以上,工作环境相对较差的大坝中部基础灌浆廊道内的倒垂线 18 倒 2测点的观测数据为例进行详细分析。
4.1 自动化监测与人工比测对比分析
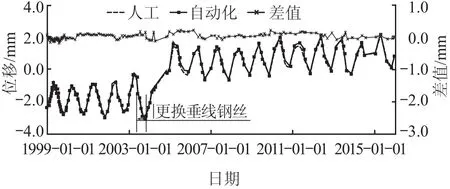
图 3 18 倒 2 测点径向位移自动化监测与人工比测成果过程线
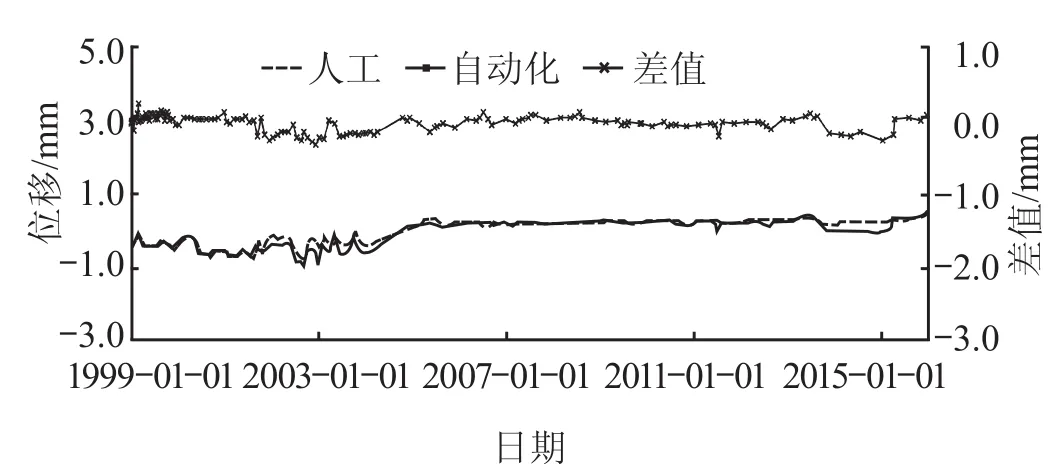
图 4 18 倒 2 测点切向位移自动化监测与人工比测成果过程线
步进光电式垂线坐标仪每测量 1 次可得到 3 个测值,分别为 X 向(径向)、Y 向(切向)位移和基准长度。以倒垂线 18 倒 2 测点为例,进行自动化监测与人工比测对比分析,该测点在 1999—2015 年期间的自动化监测与人工比测径向和切向位移成果过程线如图 3,4 所示。从自动化监测与人工比测成果过程线看,倒垂线 18 倒 2 测点的径向和切向位移成果的变化规律完全一致,其中,在 2004 年 3—10 月期间,因该倒垂线钢丝出现问题而停止测量,倒垂线钢丝重新锚固后又继续比测,两者的线性相关系数分别为 0.998 和0.937,说明变形自动化监测数据是可信的。从长达17 a 的成果看,大坝径向变形呈年周期变化,切向位移变化相对较小,符合混凝土重力拱坝变形的一般规律。
4.2 自动化监测与人工比测误差分析
从自动化监测与人工比测成果的测量精度看,因 2 种测量方式均存在误差,测量时间也有差异,所以自动化监测与人工观测的成果一定存在一个差值。参照系统试运行期间双方制定的考核和验收大纲,若自动化监测和人工观测的测量精度均按 0.10 mm 计,两测量结果之差的误差为± 0.14 mm。在 17 a 的运行期间,倒垂线 18 倒2 测点共有 166 组自动化监测和人工比测有效观测数据,成果分布统计表如表 1 所示。由此可见,大坝径向和切向位移的自动化监测与人工比测差值的分布符合正态分布规律,最大误差为 - 0.39 mm,小于3 δ,表明实际与标称测量精度基本一致。
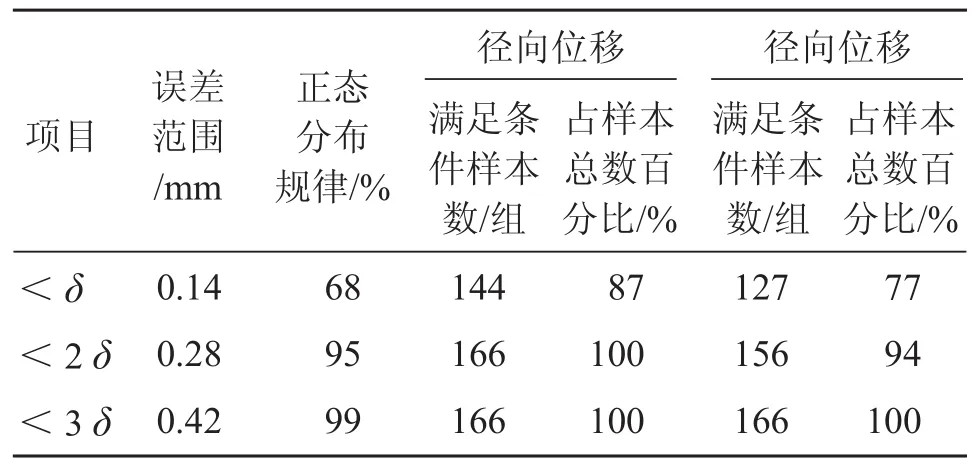
表 1 倒垂线 18 倒 2 测点自动化监测与人工比测差值分布统计表
为了检验步进光电式垂线坐标仪在长期运行中测量精度是否发生趋势性变化,分别计算倒垂线 18倒 2 测点径向和切向位移自动化监测与人工比测的逐年差值和标准偏差,统计数据如表 2 所示。由此可见,自动化监测与人工比测的逐年差值在 -0.25~0.16 mm 之间,说明该类型仪器的测量精度非常稳定;自动化监测与人工比测的标准偏差在 0.02~0.16 mm 之内,2 种测量方式没有明显的趋势性变化,说明两者差值的离散性较小。
4.3 基准长度分析
步进光电式垂线坐标仪的基准长度是固定在仪器底板上的 2 根基准杆之间的距离,是一个基本不变的值,它反映了仪器在整个量程范围内最大测量误差。由表 2 可知,仪器 17 a 运行期间的基准长度平均标准偏差为 0.03 mm,逐年标准偏差在 0.01~0.07 mm 之间,均小于仪器的测量精度 0.10 mm,标准偏差没有趋势性变化,说明 17 a 来步进光电式垂线坐标仪的测量精度没有发生变化。
4.4 其他测点分析
为全面了解步进光电式垂线坐标仪的应用情况,选择陈村大坝 8# 坝段的全部垂线测点的监测成果进行统计分析,该坝段测点布置如图 5 所示,设置 1 套正垂线计 2 个测点,正垂线测点 8 正上布置在105 m 廊道,8 正下布置在70 m 廊道;3 套倒垂线共计 3 个测点,倒垂线测点布置在70 m 横向廊道,测点编号分别为 8 倒 2,3 和 4。

表 2 倒垂线 18 倒 2 测点自动化监测与人工比测逐年差值和标准偏差统计表
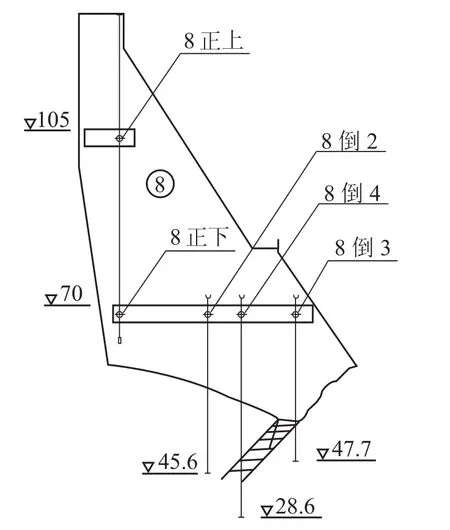
图 5 8# 坝段垂线测点布置图
1999—2015 年,8# 坝段所有垂线测点径向和切向位移自动化监测与人工比测的成果逐年差值和标准偏差统计表如表 3 所示。由此可见,各测点径向和切向位移与人工比测差值的平均标准偏差分别为 0.13和 0.11 mm,接近于步进光电式垂线坐标仪的测量精度,离散程度较小,说明仪器的测量精度较高。各测点径向和切向位移的自动化监测与人工比测差值的平均值分别为 0.00 和 -0.01 mm,表明自动化监测与人工比测的一致性较好。各个测点自动化监测与人工比测的成果与倒垂线 18 倒 2 测点的成果基本一致,表明该类仪器有较高的性能是普遍现象,不受仪器所在位置、环境等因素影响。
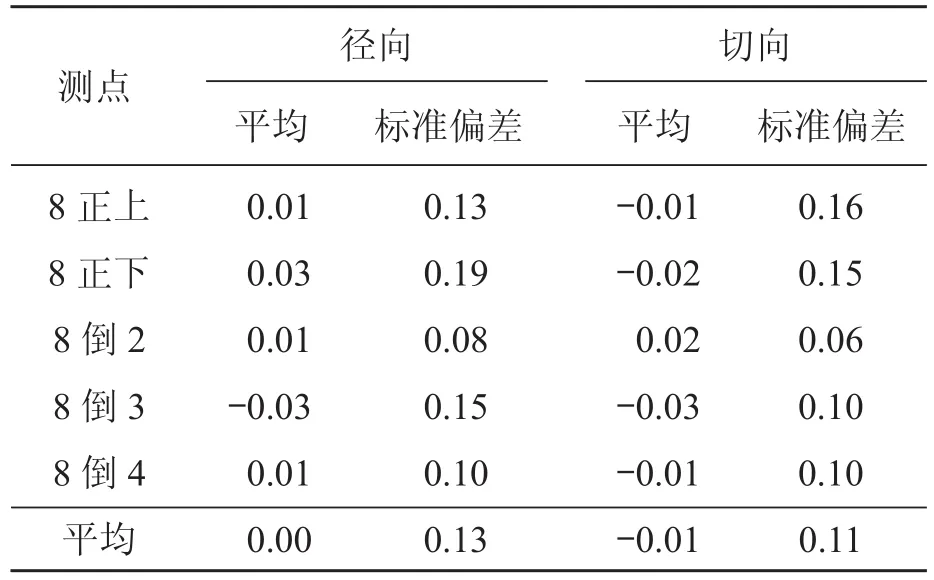
表 3 8# 坝段垂线测点多年自动化监测与人工比测逐年差值和标准偏差统计表 mm
5 运行管理
步进光电式垂线坐标仪在实际工程中长期应用表明,稳定可靠的监测仪器和自动化监测设备是成功应用的前提,完善的制度及有效的管理是成功应用的保证。陈村水电站大坝安全监测自动化系统项目经历了 17 a 的长期运行,虽然工程运行管理人员变化 3 次,计算机操作系统、数据库进行多次升级,但只要工程运行管理人员能够熟练掌握自动化系统仪器设备的日常维护,仪器设备厂家能够长期提供必要的技术支持和售后服务,仪器设备及自动化系统依旧能够稳定运行,为工程安全运行提供准确、可靠的技术支撑。
针对大坝安全监测自动化系统的特点,陈村水电站制定了完善的管理制度,并做到长期坚持按制度办事,具体要求如下:
1)定期进行人工比测,确保取得可靠的观测成果,校核测值的准确性;
2)利用人工观测和巡视检查的机会对监测仪器及设施进行检查,发现问题及时维护,确保监测仪器及设施完好、可靠;
3)每年汛前对自动化系统仪器设备及监测设施进行保养、维护,确保仪器设备及监测设施状态完好;
4)出现故障,管理人员应及时维修,需要时,与仪器设备生产厂家及时联系,尽量在较短的时间内排除故障,保证自动化系统长期稳定运行。
从 17 a 来的比测数据可以看出,步进光电式垂线坐标仪在陈村水电站大坝安全监测自动化系统运行效果良好,测量精度高,数据准确可靠,仪器运行稳定,能长期在恶劣的水工环境下正常运行,大大优于国家电力公司发输电部出台的《水电厂大坝安全监测自动化系统验收细则》(发输电发〔2002〕631 文)[6]规定的要求。为此运行管理单位根据自身特点,逐步减少了人工观测频率,将大坝安全监测自动化系统投入实用化应用,完全用自动化监测成果编制年度报告上报上级主管单位,降低电厂运行成本,减轻工程管理人员劳动强度,提高安全监测工作效率,满足电厂运行管理实际需要。
6 结语
步进光电式垂线坐标仪是集光学、机械、电子于一身的精密监测仪器,采用了多项专利技术,具有结构简单、性能稳定、准确可靠、维护方便、经济实用等特点。双基准杆设计解决了仪器零点漂移问题,同时实现了测值自校功能;光电探头双电路设计实现了仪器与垂线真正的非接触,确保监测设施的自由状态;传动机构采用滑动导杆和滚动支撑杆设计,确保光电探头能平稳地作直线运行,保证仪器测量精度。
步进光电式垂线坐标仪性能优越,技术性能特别是测量精度、长期稳定性和可靠性得到了近 20 a的实际运行考验,能满足水工恶劣环境下长期、稳定、可靠运行的使用要求及相关标准规范中规定的技术指标,说明步进光电式系列仪器具有优越的技术性能,是垂线、引张线实现自动监测的首选。
[1] 国家电力监管委员会大坝安全监察中心. 岩土工程安全监测手册[R]. 杭州:国家电力监管委员会大坝安全监察中心,2013: 221-224.
[2] 水利部南京水利水文自动化研究所. DG 型大坝安全自动监测系统仪器设备培训教材[R]. 南京:水利部南京水利水文自动化研究所,2012.
[3] 佘进. 陈村大坝安全监测系统及管理综述[G]//中国水力发电工程学会大坝安全监测资料分析与信息处理学术研讨会论文集. 北京:中国水力发电工程学会,1998.
[4] 陈村水电站水工科. 陈村水电站大坝监测自动化系统一期工程运行报告[R]. 泾县:陈村水电站,1999.
[5] 周克明,王建龙,吴建琨. 步进光电式变形监测仪器的长期应用[J]. 水利水电技术,2016,47 (11): 115-119.
[6] 国家电力公司. 水电厂大坝安全监测自动化系统验收细则(发输电发〔2002〕631 文)[A]. 北京:国家电力公司,2002: 4-5.
Practical application and practice of stepping motor type pendulum coordinometer
LIU Bo1, XIE Honglan2,3, LI Dong2,3
(1. Guanyinge Reservoir Administration of Liaoning Province, Benxi 117100, China;2. Jiangsu Naiwch Corporation, Nanjing 210012, China;3. Nanjing Automation Institute of Water Conservancy and Hydrology, Nanjing 210012, China)
This article introduces the conf i guration, operation principles and calculation methods of the stepping motor type pendulum coordinometer. Analyzing accumulative data through17 years of operation, and comparing them with data measured manually, this article illustrates the instrument’s superior performance of extraordinary accuracy,stability and reliability. It can completely replace manual measurement and realize practicality of dam safety automatic monitoring. It is the best choice of midperpendicular automatic monitoring of dam safety monitoring.
pendulum coordinometer; stepping motor; safety monitoring; manual measurement for comparison;data analysis; practicality
TV698.1;P335
A
1674-9405(2017)06-0046-05
10.19364/j.1674-9405.2017.06.009
2017-05-19
刘 波(1967-),女,辽宁本溪人,高级工程师,从事水库运行管理工作。
猜你喜欢
交通企业管理(2022年5期)2022-09-02 06:55:18
新世纪智能(教师)(2021年2期)2021-11-05 08:43:18
小学生学习指导(中年级)(2021年10期)2021-11-01 08:17:08
治淮(2021年6期)2021-08-05 08:55:56
海洋通报(2021年2期)2021-07-22 07:55:26
航空动力(2020年6期)2021-01-05 09:02:50
宝藏(2019年10期)2019-11-26 10:09:02
中国老区建设(2016年9期)2016-02-28 09:34:11
水道港口(2014年1期)2014-04-27 14:14:35
大坝与安全(2014年6期)2014-03-23 17:31:41