
基于DSP的最小触发角控制研究
2017-12-21 01:13赵利刚赵勇王磊李兴源李妮王超
电测与仪表 2017年15期
赵利刚,赵勇,王磊,李兴源,李妮,王超
(1.南方电网科学研究院,广州 510080;2.四川大学 电气信息学院,成都 610065)
0 引 言
为了更好地满足电网在科研、规划、运行等方面的需求,南方电网科学研究院引进美国某公司的电力系统机电暂态仿真代码后,经过自己的消化和吸收,研发出交直流电力系统计算分析软件DSP(Dynamic Simulation Program),该软件在仿真规模、仿真准确性和仿真效率等方面基本能够满足实际电力系统仿真的需求。国内已有利用该软件进行建模与仿真的先例[1]。
高压直流输电系统的整流侧由定电流控制和最小触发角控制组成[2]。最小触发角控制在实际直流输电工程中应用较为广泛[3-8]。比如文献[9]基于实际直流输电工程,针对最小触发角控制的控制逻辑进行了详细的说明,但是对于如何实现最小触发角控制,特别是对于具体参数设置以及信号选取等问题并没有提及。
整流侧在故障恢复过程中,随着电压的快速恢复,此时的触发角会快速恢复到一个很大的值,系统将会出现过电流和过电压,此时将会对系统造成极大的危害[10]。为了能够抑制这种现象,就必须在故障恢复时增大触发角,能够实现这个目的的控制被称为最小触发角控制。
最小触发角控制是高压直流输电系统整流侧所独有的一种附加控制方式。它是整流侧定电流控制的附加控制,该控制并不直接作用于定电流控制,而是通过对定电流控制限幅环节的控制对触发延迟角α进行间接控制。
本文受文献[11]采用功率分量法作为输入信号的启发,基于DSP软件和文献[9]所提出控制逻辑,对高压直流输电控制系统中整流侧最小触发角控制进行了自定义开发,仿真验证了所开发的自定义模块实现了最小触发角控制功能。
1 最小触发角机理分析
整流侧触发角的定义式为:

式中Udor为整流侧直流电压,Udoi为逆变侧直流电压,γ为熄弧角。在直流系统稳态运行时,整流侧触发角α与直流电流Id呈反比。当α越小时,Id越大;当α越大时,Id越小。
由此可见,要减小故障恢复过程中过电流Id,就必须增大触发角α。
2 最小触发角自定义模块实现
2.1 功率分量信号
为了更早地检测出交流故障,本文提出采用功率分量信号作为最小触发角自定义模块的输入信号。该信号综合了电压与电流在交流故障发生后突变的特征,对故障的反应更加灵敏,可解决单一物理量检测交流故障时灵敏度不够高、检测结果不够可靠的问题。
单独选择交流电压或者直流电压信号作为最小触发角自定义模块的输入信号的优点是在故障期间能够降低故障对直流功率的影响;单独选择直流电流的优点是在故障和恢复期间的灵敏度更高。通过在换流母线上实时监测三相电压,并考虑整流侧直流电流,二者的共同作用,得到最小触发角自定义模块所需的功率分量信号。
对于电压分量的实时监测,有:

式中ua(t)、ub(t)、uc(t)为换流母线三相电压实时监测值,Uac为换流母线交流电压。而对于电流分量的实时检测,可以通过DSP自定义语句来实现。
将电压、电流分量相结合,定义功率分量如下:

式中Uac和Id均为标么值,P′为该出线上的功率分量信号。
采用该信号的好处是既反映了交流电压的特性,又反映了直流电流的特性。采用自定义功率分量信号P′作为输入信号,既能够利用交流电压信号在故障过程中的正常响应,又能够利用直流电流信号优于电压信号的敏感性。将电压、电流分量作为最小触发角自定义模块的输入信号,能提高故障检测的准确性。
2.2 控制器设计
在采用功率分量信号作为最小触发角自定义模块的输入信号的基础上,要实现最小触发角控制功能则需要设定2个阈值K3和K4,分别对应2种限幅水平αmin1、αmin2,且αmin1≥ =αmin2。DSP包含最小触发角自定义模块的整流侧控制策略如图1所示。
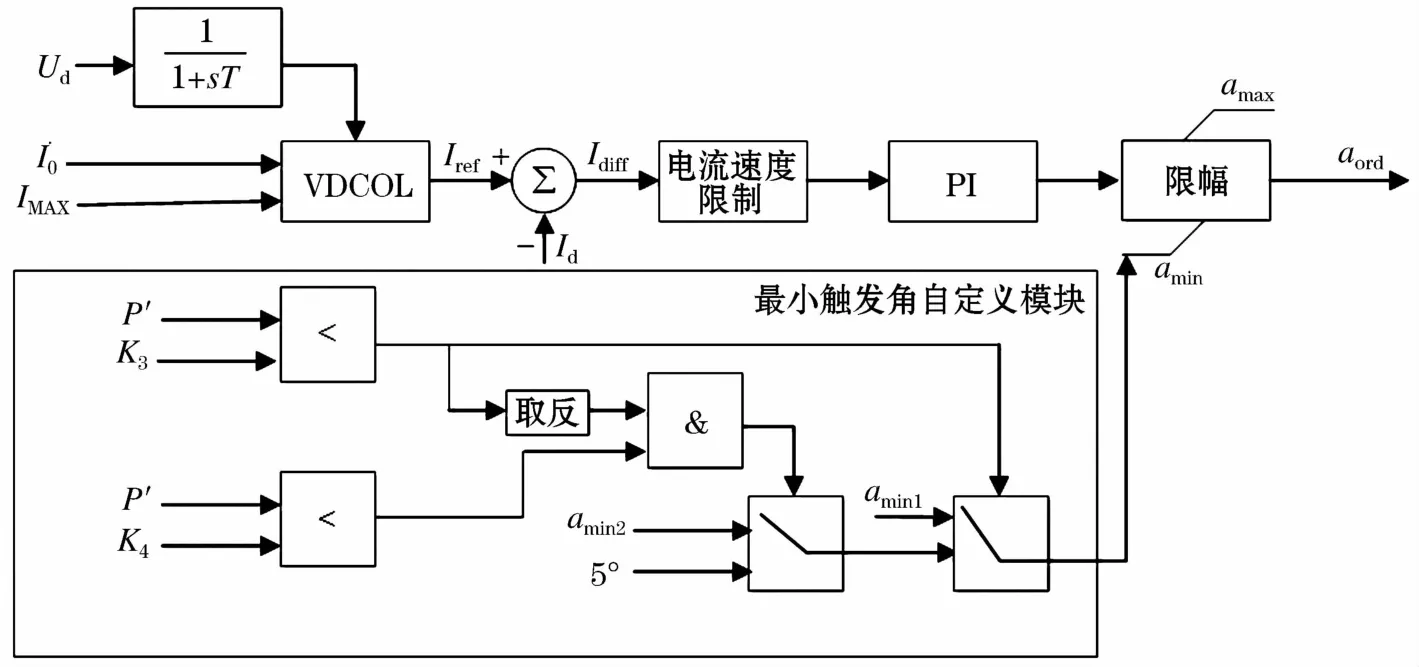
图1 含最小触发角自定义模块的整流侧控制策略Fig.1 Rectifier side control strategy with the minimum firing angle control custom module
正常情况下,整流侧最小触发角αmin为5°。整流侧发生交流故障时,触发角α将快速减小至αmin。故障切除后,随着电压的快速恢复,若触发角α过小,直流电流可能出现过冲现象。
最小触发角自定义模块的算法及其实现功能如下所示:
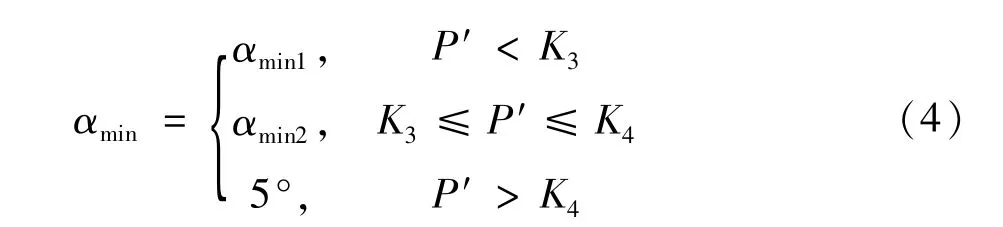
当整流侧P′<K3时,αmin=αmin1;当K3≤P′≤K4时,αmin=αmin2;当P′>K4时,αmin=5°;稳态运行时αmin=5°。
当整流侧交流母线发生三相故障后,整流侧瞬时有功功率标么值瞬间从1变为0,最小触发角将会由5°经过一定的延迟变为αmin2(由于下降速度太快,中途的最小触发角αmin没有在αmin1~αmin2过渡);当切除故障后,整流侧P′从0恢复到1,最小触发角分别经过αmin2(此时最小触发角控制起作用),αmin1~αmin2(此时最小触发角控制起作用),5°三个阶段。当αmin=5°时,直流控制系统恢复到稳定运行状态。
3 仿真测试
3.1 仿真模型建立
最小触发角自定义模块一共有4个未知参数,即K3,K4,αmin1,αmin2。它们的取值方法在国内外文献中均无参考,特别是当K3≤P′≤K4时的最小触发角的变化规律和取值范围最难确定。
经过大量仿真得到如下规律:最小触发角取值太大会造成故障恢复过程中发生失稳现象,而取值太小则会造成在故障恢复过程中不起作用。
经过多次仿真后得出,当K3=0.6,K4=0.8,αmin1=25°,而αmin2=20°,且当K3≤P′≤K4时,最小触发角按照线性规律由25°渐变为20°,即时控制效果较好。
本文选择的直流仿真模型及参数是机电暂态仿真程序DSP中CIGRE-1DC,如图2所示。该模型为单极十二脉动直流输电系统,其基本参数如下:单极额定传输功率1 500 MW,额定直流电压500 kV,额定换流母线电压525 kV,额定电流1.5 kA,输电距离1 210 km,换流器采用双极12脉动接线方式且两端中性点均接地。
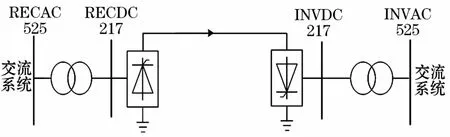
图2 直流系统模型Fig.2 Model of the DC system
3.2 仿真结论分析
本节以DSP仿真软件中的算例CIGRE-1DC为仿真模型,并搭建相同参数的PSCAD模型对本节提出的最小触发角自定义模块进行对比。通过对加入最小触发角控制自定义模块的CIGRE-1DC(蓝色线条)、原 CIGRE-1DC模型(黑色线条)、以及 PSCAD模型(红色线条)的仿真,对比三组仿真结果,验证该最小触发角自定义模块的控制效果。在仿真测试中,机电暂态仿真软件DSP的步长为0.01 s,电磁暂态仿真软件PSCAD的步长为50μs。
仿真运行2 s时,在整流侧换流母线(RECAC)处设置三相短路故障,0.1 s(DSP里的10个步长,PSCAD里的2 000个步长)后切除故障。针对10个电气量的仿真结果进行了对比,它们分别是整流侧的触发角、直流电流、直流电压、直流功率、换流母线电压以及逆变侧的熄弧角、触发角、直流电流、直流电压、换流母线电压。对DSP(加入控制后)、DSP(加入控制前)、PSCAD/EMTDC(未加入任何控制)三种情况下进行了详细对比,如图3所示。
如图3(a)所示,故障发生后,加入最小触发角自定义模块模型和未加最小触发角自定义模块模型的整流侧触发角均快速下降至5°。触发角的快速减小能够一定程度上弥补直流电压的跌落,这将有利于降低故障对直流功率的影响。随后,加入最小触发角自定义模块的DSP模型0.04 s后快速上升到了25°,0.05 s后的最小触发角均为25°。
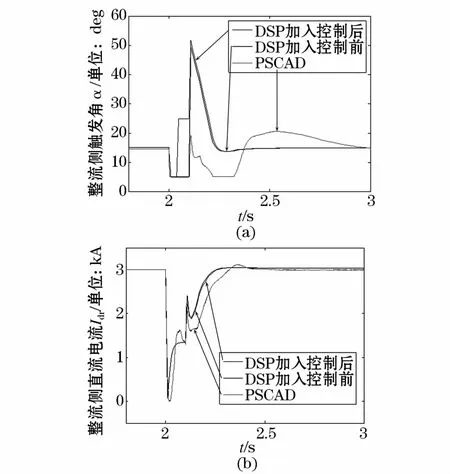
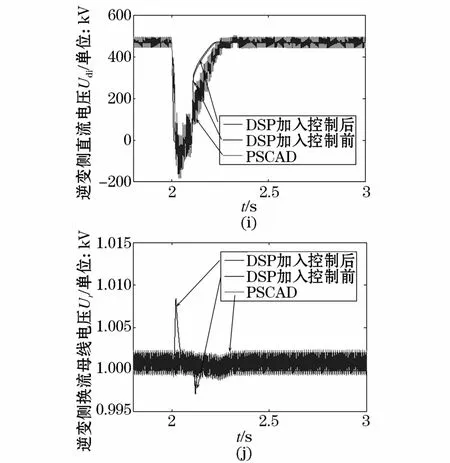
图3 整流侧三相短路故障仿真结果对比Fig.3 Comparison of simulation results of three-phase short-circuit fault in rectifier side
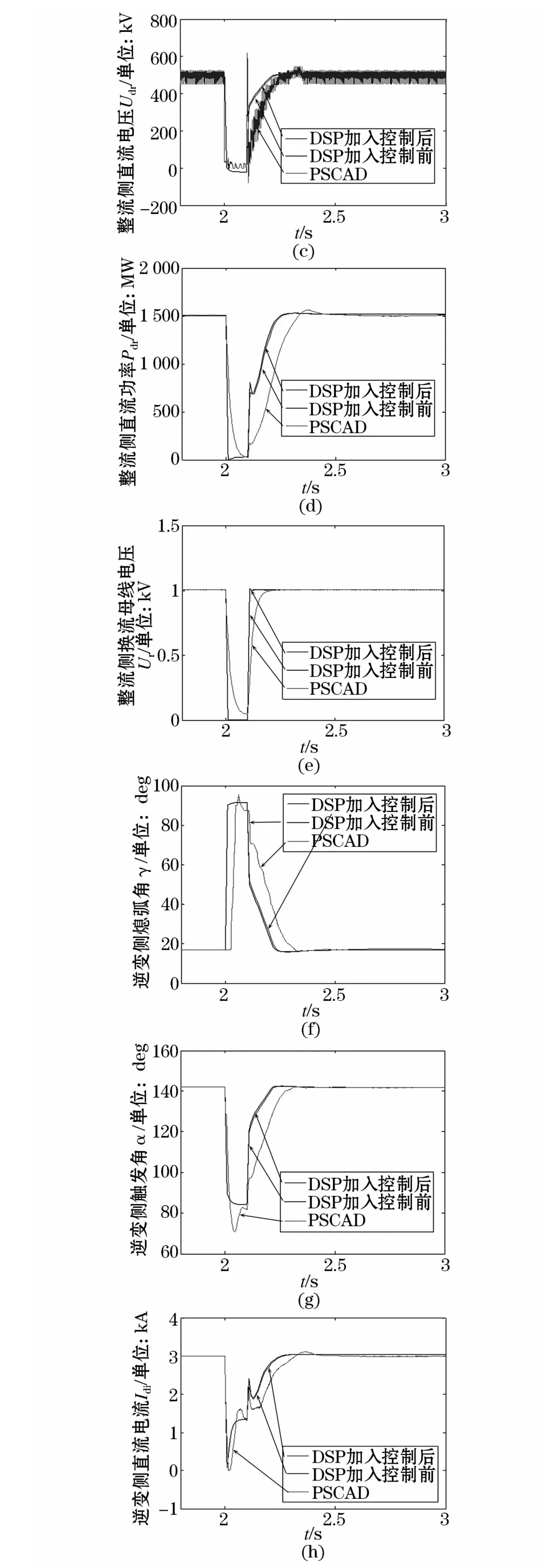
2.1 s故障被切除后,加入最小触发角自定义模块模型的触发角可快速上升到51.6°,而未加最小触发角自定义模块模型的触发角则上升至49.2°。由于在故障恢复过程中,较大触发角会减少故障切除瞬间的过电流,而恢复过程中加入最小触发角自定义模块模型比未加最小触发角自定义模块模型触发角大0°到1.6°,因此有利于持续减少恢复过程中的过电流。
由图3(b)可知,故障期间,加最小触发角自定义模块模型与未加最小触发角自定义模块模型的直流电流响应一致。2.1 s切除故障后,由于加入最小触发角自定义模块模型的触发角比未加最小触发角自定义模块模型触发角大2.4°,加入最小触发角自定义模块后,比原模型瞬时过电流降低了0.2 kA。恢复过程中,加入最小触发角自定义模块模型的直流电流较原模型小0 kA~0.06 kA,且两个模型均需0.18 s恢复到稳态值。表明加入最小触发角自定义模块未影响直流电流的正常恢复,同时能一定程度上抑制故障恢复过程中的瞬时过电流。
由图3(c)可知,故障期间,加最小触发角自定义模块模型与未加最小触发角自定义模块模型直流电压响应一致。2.1 s切除故障后,由于加入最小触发角自定义模块模型的触发角比没加最小触发角自定义模块模型的触发角大一些,所以恢复过程中加入最小触发角自定义模块模型的直流电压均比没加的要小0 kV~15.3 kV,且两个模型均需0.13 s恢复到稳态值。表明加入最小触发角自定义模块未影响直流电压的正常恢复,同时能一定程度上抑制故障恢复过程中的瞬时过电压。
由图3(d)可知,由于直流功率由直流电流和直流电压的乘积决定,直流功率的暂态特性综合了直流电压和直流电流的暂态特性。故障切除后,因为加入最小触发角自定义模块模型的直流电流和直流电压相均比原模型的对应值较小,所以直流功率差别很大。
由图3(j)可知,加入最小触发角自定义模块模型的换流母线电压与原模型的换流母线电压在故障期间响应一致。恢复过程中,加入最小触发角自定义模块模型的换流母线电压比原模型的换流母线电压波动较小,且恢复过程更加平稳,仿真达到了预期效果。
4 结束语
综上所述,当整流侧交流母线发生三相短路故障后,通过编写DSP最小触发角自定义模块语句实现了控制目的,即在故障发生时不动作,仅在故障恢复过程中有计划地动作。最小触发角自定义模块既实现了在故障过程中让触发角的快速减小来弥补直流电压的跌落,从而降低故障对直流功率的影响;又实现了一定程度上抑制在故障恢复过程中出现的过电流和过电压的目的。这两点分别在图3(b)、图3(c)、图3(h)、图3(i)中有所体现。
与此同时,该控制对这10个电气量的恢复时间没有一点延迟,这对于系统的正常运行至关重要。大量的仿真表明,所设计的最小触发角自定义模块能够实现抑制整流侧故障恢复中的过电流和过电压的目的,具有一定的实际参考意义。
猜你喜欢
测控技术(2021年10期)2021-12-21
基层中医药(2021年12期)2021-06-05
智族GQ(2019年9期)2019-10-28
英美文学研究论丛(2018年1期)2018-08-16
通信电源技术(2018年3期)2018-06-26
电源技术(2015年11期)2015-08-22
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年10期)2015-04-09
电测与仪表(2015年5期)2015-04-09
电测与仪表(2014年23期)2014-04-04
