
基于LMI的电力系统分散控制器设计
2017-12-21 02:18:44葛丹丹邹裕志史萌萌
电气技术与经济 2017年5期
葛丹丹 邹裕志 史萌萌
(1.华北电力大学新能源电力系统国家重点实验室 2.国网南平供电公司3.国网江西省供电公司景德镇市分公司 )
基于LMI的电力系统分散控制器设计
葛丹丹1邹裕志2史萌萌3
(1.华北电力大学新能源电力系统国家重点实验室 2.国网南平供电公司3.国网江西省供电公司景德镇市分公司 )
发电机励磁系统中加装电力系统稳定器(PSS)是目前最常规的抑制低频振荡的措施,但基于传统理论方法设计的PSS参数仅适用于某一特定运行点。鲁棒控制理论的发展弥补了传统控制器设计的弊端,另外线性矩阵不等式(LMI)方法的出现也解决了求解困难的局面。本文基于线性时不变系统模型,利用LMI方法,研究了H∞状态反馈分散控制器的设计,并以四机十一节点互联电力系统为例,进行了实例设计,仿真分析表明,所得控制器能使闭环大系统鲁棒稳定。
线性时不变系统;分散控制;线性矩阵不等式;H∞状态反馈
0 引言
低频振荡[1]是电网大规模互联后极易发生的动态稳定问题,尤其是在采用快速响应高放大倍数励磁系统的条件下更容易出现。这是由于快速励磁调节器产生的附加阻尼为负值,抵消了系统本身所固有的正阻尼,使系统的总阻尼减少或成为负值[2,3],以致系统在扰动作用后的功率振荡长久不能平息,甚至导致自发的低频振荡,低频振荡的频率一般在0.1~2.5Hz之间。
低频振荡会引起联络线过流跳闸、系统与系统或机组与系统之间的失步而解列,严重威胁电力系统的稳定,因此解决低频振荡问题成为电网安全稳定运行的重要课题之一。自20世纪60年代以来,相关学者在发生机制、分析方法和控制措施等方面进行了较为广泛的研究[4-7],对低频振荡问题的认识获得了很大的进步。在发电机侧加装电力系统稳定器(PSS)是目前抑制低频振荡的常用手段[8],但由于PSS的参数是针对系统的某一特定频率而进行整定的,所以当系统运行状态改变时,控制结果必然会偏离最佳控制点,甚至会在某些运行点上存在着激发轴系扭振和使系统阻尼减小的危险。此外,在多机系统中还存在安装地点选择和参数协调整定问题。
为了能在设计过程中考虑到系统的各种不确定性,同时弥补传统线性PSS控制器只基于系统的某一个运行点进行设计的缺陷,鲁棒控制的方法被提出并广泛地应用于各种控制系统的设计中[9-12]。此外,考虑到电力系统的地理覆盖面极广,若直接采用集中控制,各控制站之间实时信息的交换成本高且难以实现,因此按照各控制站地理位置的分布实行分散控制[13,14]是电力系统稳定控制的首选控制方法。目前,基于鲁棒理论的分散控制问题的研究已取得进展,但所有这些研究成果普遍存在计算复杂、求解困难的问题。随着求解凸优化问题内点法的提出,LMI方法[15-17]以其高效的求解算法和能获得全局最优解引起了控制界的关注,成为鲁棒控制分析与设计的重要方法。
为此,本文以四机十一节点系统为例,基于LMI方法对电力系统H∞状态反馈分散鲁棒控制器进行设计,并利用Matlab的用于求解线性矩阵不等式问题的LMI工具箱[18]进行仿真验证。仿真结果显示,设计得到的控制器对抑制互联系统的低频振荡问题有较显著的效果,保证了大系统的鲁棒稳定。
1 线性矩阵不等式LMI
线性矩阵不等式LMI可以表示成如下的一般形式:

L( x)< 0表示 L( x)是负定的,即对所有非零的向量或者 L( x)的特征值均小于零。若下式成立:

则相应的矩阵不等式称为非严格的线性矩阵不等式。
多个LMI可以用一个LMI来表示,即

等价于

线性矩阵不等式L( x)<0这个约束条件定义了自变量空间中的一个凸集,即因此是自变量的一个凸约束。正是线性矩阵不等式的这一性质使得可以应用解决凸优化问题的有效方法来求解相关的矩阵不等式问题[19]。
2 H∞理论
本文旨在设计具有H∞励磁控制规律的分散控制器,因此在进行其他相关工作的说明之前,首先以图1所示的广义系统为例,对H∞理论进行简要说明[20]。
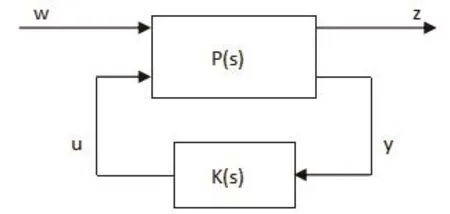
图1 广义系统
P( s)表示一个线性时不变系统,由以下的状态空间描述:

式中, x∈Rn为状态向量; u∈Rm为控制输入;y∈Rp为测量输出; z∈Rr为被调输出; w∈Rq为外部扰动; K( s)为一个控制器的传递函数。
本节的目的是设计控制规律u=Kx,使得相应的闭环系统稳定,即闭环系统状态矩阵的所有特征值均在左半开复平面:

设计分散的状态反馈H∞控制器,大多通过解Riccati方程进行,但是控制理论涉及较多的数学基础,求解过程复杂,有时尽管问题本身有解,但也难以得到。LMI方法的出现,给从前不能或难以得到解析解的问题带来希望,使得求解变得简便。所以本文将该设计问题归结为如下优化问题:

如果该优化问题有解,则结合如下定理:
对系统(5),存在一个状态反馈H∞控制器,使得闭环系统(6)是渐进稳定的,当且仅当存在一个对称正定矩阵X和矩阵W,使得以下的矩阵不等式成立:

进而,如果上述矩阵不等式存在一个可行解X∗,W∗,则是系统(5)的一个状态反馈H∞控制器。
利用该优化问题的最优解可以得到系统(5)的最优H∞控制器。
这个优化问题是一个具有线性矩阵不等式约束和线性目标函数的凸优化问题,因此可以用LMI工具箱中的求解器mincx来求解该问题,从而实现多机电力系统最优鲁棒励磁调节器的设计。
3 设计步骤
具体的计算流程及算法步骤[21]如下:
1)列出多机系统的元件数学模型,根据潮流计算结果计算各代数量和状态量的初值。将各元件模型在工作点处线性化,形成全系统的线性化状态方程
2)用QR分解法计算系统的全部特征根ni及其相应的左右特征向量ml,m。
3) 将 特 征 根 中 振 荡 频 率 在0.2~0.5Hz的根取出,计算其与各状态量xk的相关因子,进而计算iλ的机电回路相关比cyyz(:,i),找出低频振荡模式 (:,)1 cyyz i>。
5)根据机电模式λi和状态量xk的相关因子幅值大小可判断与哪一台发电机强相关,从而根据需要决定是否安装分散控制器。
6)依据式(7)在Matlab中编程求得各分散控制器的控制规律。
7)针对实例用上述方法设计分散控制器,并仿真验证该方法的有效性。
4 设计实例
本文选择IEEE四机十一节点系统作为研究对象,进行分散控制器设计。该标准系统结构如图2所示,包括两个相似的区域,两区域间用一条弱联络线连接,每个区域有两台耦合的机组。
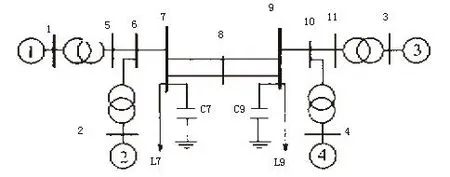
图2 IEEE四机十一节点系统结构图
4.1 设计过程
结合第3节给出的设计步骤,对图2所示的系统基于某一稳定运行点进行线性化后,计算系统的特征值,鉴别系统的低频振荡模式,依据每个特征值的机电回路相关比决定分散控制器的安装位置。表1给出了计算得到的各机电模式和各状态量的相关因子。
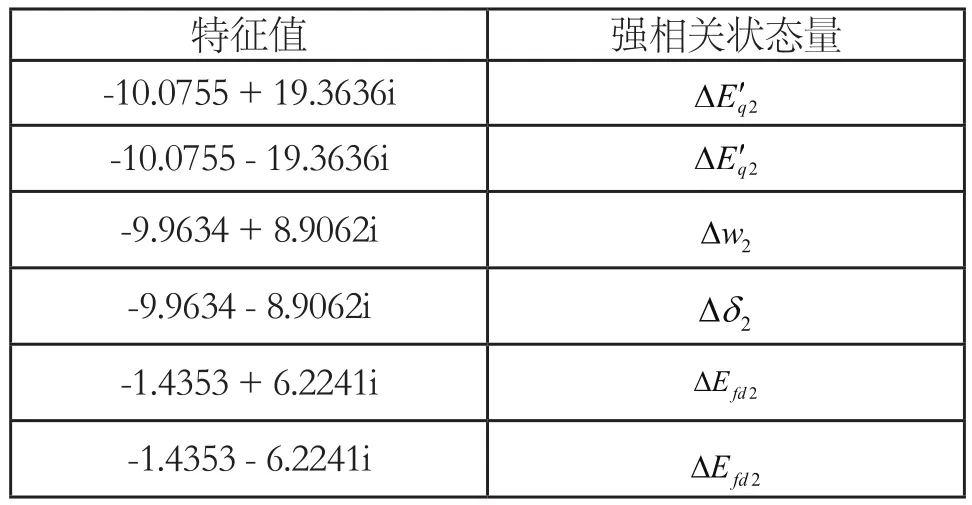
表1 各机电模式及强相关状态量

-0.2705 + 5.9925i-0.2705 - 5.9925i∆2δ-0.2636 + 5.5871i ∆w3-0.2636 - 5.5871i∆3δ-0.9071 + 3.7679i Efd1∆-0.9071 - 3.7679i ∆Eq′1 0.1962 + 3.5281i∆3δ 0.1962 - 3.5281i ∆w3 0.0002 + 0.276i ′0.0002 - 0.276i ∆Eq′1∆Efd1
由上表可见,其中前八个机电模式仅与第二台机组的状态量强相关,所以第二台机组需装设分散控制器,且被调输出为其第二、三、四个状态量。第九、第十、第十三、十四个机电模式与第三台机组的第一、第二个状态量强相关,那么第三台机组也应该装设分散控制器,且选择第三和第四个状态量为被调输出,同样地,第一台机组也需要装设分散控制器,并选择第三、第四个状态量为被调输出。各机电模式均与第四台机组无关,因此,理论上来讲,不需装设分散控制器。
根据以上分析,编程得到第一、二、三台机组对应分散控制器的反馈增益,但在上述条件下,由公式得到的对应于第三台机组的分散控制器的反馈增益有可能是不正确的,因为公式的矩阵有可能有非奇异解。所以这里尝试重新选择被调输出量,经验证,选择第三台机组的状态量作为被调输出,也能保证系统在受到小干扰的情况下,保持静态稳定,此时各分散控制器的反馈增益见表2。

表2 各机组分散控制器的反馈增益
加装分散控制器后(见表3),所得闭环系统的特征值均在复平面的左半部分,根据李雅普诺夫小干扰稳定性判断原则,系统是静态稳定的。运行相关程序得到系统的低频振荡模式的阻尼比,此时系统低频振荡模式的阻尼比为ξ = 0.02426225121813,根据欠阻尼原理,系统的总阻尼很小时,如果受到扰动,系统中的功率振荡长久不能平息,就会造成减幅或等幅的低频振荡,所以这里系统恢复稳定需要较长的时间(具体结果见4.2节)。

表3 加装分散控制器前后系统的特征值
4.2 仿真验证
为了验证本文所提到的控制方案在提高系统稳定性能方面的效益,假定系统中机组一的机械转矩增加0.5%的机械功率阶跃扰动,扰动持续0.5s后消失,此时系统存在低频振荡,结果显示未加装控制器时系统本身是不稳定的,各发电机呈增幅振荡,而加装分散控制器后,系统的稳定性得到了明显的改善,较好地抑制了低频振荡,但因为系统总阻尼较小,恢复稳定需要较长时间。仿真结果如图3~4所示。

图3 加控制器前发电机一和二的相对功角变化曲线
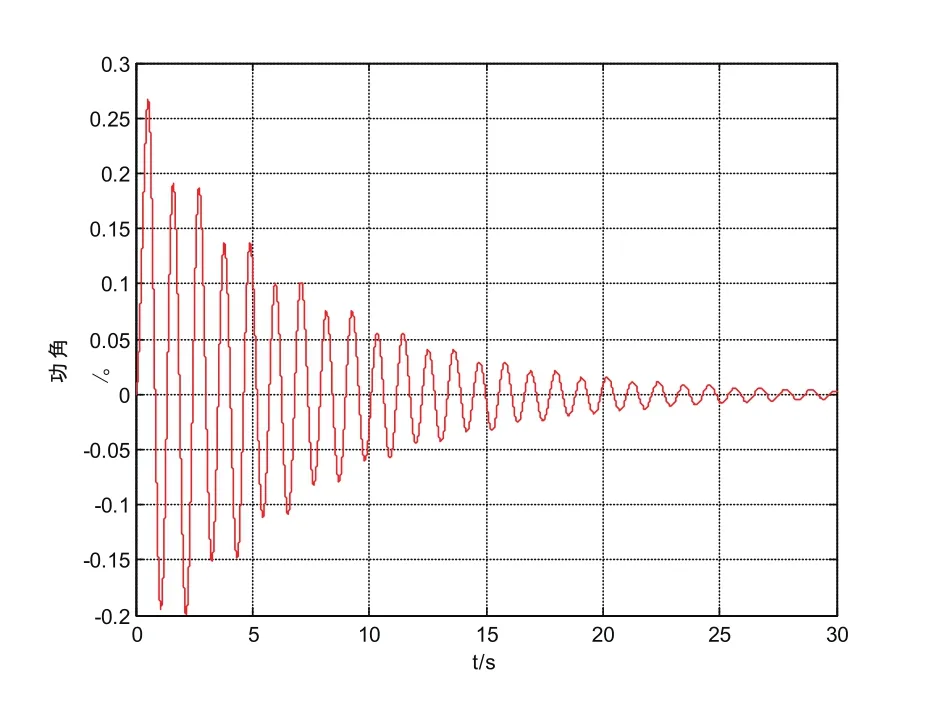
图4 加控制器后发电机一和二的相对功角变化曲线
需要说明的是,本文设计的是孤立的分散控制器,其设计目标只是满足某一直观的、简单的、局部的要求,换句话说,各控制器虽然能各自为其局部的目标服务,但很难保证各局部控制器的控制作用不发生冲突。即使各控制器之间不发生相互冲突,要使它们相互协调,使系统总体性能达到最佳,也几乎是不可能的。所以由仿真结果可以看出,因为正阻尼过小,在系统受到小扰动时,会经过一个较长时间的低频振荡才能静态稳定。
5 结束语
本文结合子系统状态量反馈分散控制理论研究了多机电力系统励磁控制,并基于LMI方法解决了电力系统分散控制器的具体设计过程。研究结果显示,本文给出的控制器设计思路,计算量很小,避免了采用全局模型带来的过大计算量而无法应用于大系统的问题。另外,本文采用的计算各状态量与各特征值的机电回路相比,确定与各特征值强相关的状态量的方式,可以决定分散控制器的安装位置和顺序,从而可以解决大系统中分散控制安装顺序的问题。
在控制系统的设计中,由于许多限制或者附加条件,导致求解问题越来越困难,但这些一般都可转化成求解LMI的标准问题,且LMI的标准问题有多种数值解法,而它们共同的思路就是把LMI问题看作凸优化问题来处理。LMI有多种标准问题的形式,无论理论上还是实际上都可以有效地求解,即确定这些问题的解是否存在,且求解程序是比较简单的,求解时间很短。因此,随着计算机技术和优化理论的发展,基于线性矩阵不等式的设计方法今后会有很大的发展和应用。
[1] 倪以信,陈寿孙,张宝霖. 动态电力系统的理论与分析[M]. 北京:清华大学出版社, 2002.
[2] 王铁强,贺仁睦,王卫国,等. 电力系统低频振荡机理的研究[J]. 中国电机工程学报, 2002,22(2): 21-25.
[3] 韩慧云,黄梅. 电力系统低频振荡与PSS分析[J]. 华北电力技术,2005(7): 1-4.
[4] 陈允平,孙婉胜,张海梁,等.低频振荡分析和控制方法的研究[J].高电压技术,2007,33(4):91-94.
[5] 贾勇,何正友. 基于受扰轨迹的低频振荡分析方法综述[J]. 电力系统保护与控制, 2012, 40(11): 140-148.
[6] 孙建波,赵娴,李大虎,等. 利用储能抑制互联电力系统联络线功率振荡的研究[J]. 电力系统保护与控制,2013,41(17): 10-17.
[7] 马燕峰,赵培龙,赵书强. 多机电力系统的强迫功率振荡特性研究[J]. 电力系统保护与控制,2013,41(24):22-29.
[8] 马曦,何旭,杜冰心. 电力系统稳定器PSS4B的仿真研究[J]. 电网与清洁能源, 2014,30(2): 32-37.
[9] 梅生伟,申铁龙,刘康志. 现代鲁棒控制理论与应用[M]. 北京: 清华大学出版社, 2008.
[10]马静,王彤,王增平,等.基于非凸稳定区域的广域阻尼鲁棒控制策略[J].电力自动化设备,2013,33(5):14-18.
[11]Y.-C.Chang. Robust H∞ control for a class of uncertain nonlinear time-varying systems and its application[J]. IEE Proc.-Control Theory Appl 2004,151(5):601-609.
[12]蒋平 叶慧,吴熙. 基于留数的静止同步补偿器附加阻尼鲁棒控制[J]. 电网技术, 2012,36(10): 131-135.
[13]张凯锋,戴先中.电力系统分散控制[J].电力系统自动化,2003,27(19):86-89.
[14]王广,李建华,夏道止.基于分散控制理论的多机电力系统低频振荡抑制[J].华东电力,2007,35(6):35-38.
[15]孙宜标,金石,王成元. 基于线性矩阵不等式的环形永磁力矩电机的H2/H∞静态输出反馈控制[J]. 中国电机工程学报,2007, 27(15): 8-14.
[16]杨秀,王西田,陈陈.利用LMI技术设计鲁棒电力系统稳定器[J].继电器,2005,33(2):1-4.
[17]张立岩,赵俊华,文福拴, 等. 基于线性矩阵不等式的电动汽车网络化鲁棒控制[J]. 电力系统自动化,2013,37(20): 54-62.
[18]魏巍.MATLAB控制工程工具箱[M].北京:国防工业出版社,2004.
[19]张怡,阎晓艳.用线性矩阵不等式方法求解控制理论问题[J].机械管理开发,2006,28(1):24-26.
[20]俞立.鲁棒控制-线性矩阵不等式处理方法[M].北京:清华大学出版社,2002年.
[21]林其友,陈星莺,曹智锋.多机系统调速侧电力系统稳定器GPSS的设计[J].电网技术,2007,31(3):54-58.
2017-06-20)
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:08:00
中学生数理化·高一版(2021年2期)2021-03-19 08:32:06
自动化学报(2019年6期)2019-07-23 01:18:22
中央民族大学学报(自然科学版)(2018年3期)2018-11-09 01:16:34
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17
自动化博览(2014年4期)2014-02-28 22:31:15
