
烟草钵苗移栽机成穴机构的运动学仿真分析
2017-12-16 10:48:12徐允飞那明君
农机化研究 2017年3期
董 欣,杨 波,徐允飞,邵 菲,那明君
(东北农业大学 工程学院,哈尔滨 150030)
烟草钵苗移栽机成穴机构的运动学仿真分析
董 欣,杨 波,徐允飞,邵 菲,那明君
(东北农业大学 工程学院,哈尔滨 150030)
吊篮式烟草钵苗移栽机成穴机构的作业性能直接影响移栽机的移栽质量。为了探讨成穴机构各杆件相互作用及成穴铲运动规律,针对成穴机构进行简化,建立矢量方程得到成穴机构成穴铲的位移、速度和加速度模型。采用ADAMS软件建立成穴机构的三维运动仿真模型进行仿真分析,对获得成穴铲竖直和水平方向的位移、速度及加速度变化曲线进行分析,满足成穴要求,验证了成穴机构结构设计的合理性,为烟草钵苗移栽机成穴机构的运动轨迹进一步优化及动力学仿真分析提供了理论依据。
烟草钵苗移栽;成穴机构;运动分析;仿真
0 引言
烟草是以育苗移栽方式为主的经济作物,我国近年烟叶种植面积稳定在133.3万hm2左右,但其移栽机械化水平仍相对较低。人工移栽以大量的畜力、人工等传统落后的生产工具和生产方式为主,不适于规模化种植模式[1-2];机械化移栽可提高烟草幼苗质量,降低育苗成本,提高经济效益,降低农民劳动强度,争取更多春耕时间,达到节本、增产和增收的目的[3-5]。吊篮式烟草钵苗移栽机在移栽作业过程中要完成成穴、施肥、移栽、注水覆土和铺膜等工序。成穴作业是指根据栽烟密度(株距)要求,利用成穴机构在栽植器入土前在垄顶上成形穴坑的过程。
成穴机构是吊篮式烟草钵苗移栽机完成烟苗移栽的关键部件之一,移栽机作业时,成穴机构通过地轮驱动以一定的运动规律在垄上形成钵苗穴坑,其作业性能决定了穴坑的形状尺寸,直接影响移栽机后续作业效果、作业效率及烟苗移栽的栽植质量。采用先成穴后移栽方式,可以大大减少栽植臂入土时,土壤对栽植臂的阻力,有效地减少栽植器的磨损[6]。因此,结合烟草种植农艺要求设计适于北方烟草钵苗移栽机具,充分考虑成穴机构成穴特性的研究具有非常重要的现实意义。
为探讨北方烟草钵苗移栽机成穴机构的运动规律及特性,建立了成穴机构的运学模型。同时,基于ADAMS软件建立成穴机构的三维运动仿真模型进行成穴轨迹仿真分析,获得成穴铲位移、速度及加速度变化规律,旨在验证其结构设计的合理性,为烟草钵苗移栽机成穴机构运动轨迹的进一步优化及动力学仿真分析提供理论依据。
1 成穴机构的结构及工作原理
1.1 成穴机构结构
成穴机构是吊篮式烟草钵苗移栽机的关键部件之一,固定安装在移栽机前部,主要由曲轴、曲柄、连杆、平行四杆机构、成穴铲柱焊合、成穴铲、固定支架及滑动导轨等构成,如图1所示。成穴铲柱与成穴铲通过螺栓连接,如图2所示。

1.曲轴 2.曲柄 3.连杆 4.平行四杆机构 5.成穴铲柱焊合 6.成穴铲 7.固定支架 8.滑动导轨图1 烟草钵苗移栽机的成穴机构Fig.1 Whole structure of cavitation

1.成穴铲柱焊合 2.螺栓 3.成穴铲图2 成穴铲部装Fig.2 The shovel of cavitation
1.2 成穴机构成穴原理
为了实现移栽机作业时成穴机构间歇运动,成穴机构的设计采用曲柄摇杆机构和平行四杆机构结合的结构形式。移栽机作业时,通过地轮将动力经链传动传递至曲轴,曲轴带动曲柄做回转运动,通过连杆带动平行四杆机构使固定在成穴铲铲柱上的成穴铲实现上、下往复运动。移栽机的前进运动与成穴铲上下往复运动的合成运动成形钵苗穴坑。
2 成穴机构运动学分析
2.1 成穴机构结构模型
根据成穴机构设计的杆件参数,将成穴机构简化为平面曲柄摇杆平行四杆机构,建立成穴机构结构模型,如图3所示。

图3 成穴机构结构模型Fig.3 The Diagram of spade punch device movement
其中,O点为曲轴驱动位置转动点,驱动整个机构的运转,OA为曲柄、AB为连杆与摇杆BE组成曲柄连杆机构;ED为支架,BE、CD为平行杆与成穴铲柱焊合构成了平行四杆机构,该机构控制成穴铲在垂直地面方向的往复运动,C点运动规律与成穴铲质心F点的运动规律一致。
2.2 成穴机构运动模型建立
图3中:在O点建立平面坐标系,取x轴水平向右为正方向,y轴垂直向下为正方向。令OA=l1,AB=l2,BE=l3,OE=l4,BC=l5,CF=l6,且θ1为连杆OA与x轴夹角,θ2为摆杆AB与x轴夹角,θ3为摇杆BE与x轴夹角θ4为OE与x轴夹角(θ变化为0~360°),各杆角位移以顺时针为正方向。
根据简化结构模型建立四杆机构OABE及平行四杆机构BCDE的封闭矢量方程[4],即

(1)

(2)
将矢量方程转化为解析式,得出各点位置方程:
A点位移方程为
(3)
B点位移方程为
(4)
C点位移方程为
(5)
成穴铲质心F点的位移方程为
(6)
设机具前进速度为v,方向为x轴负方向,则成穴铲质心F点随时间t变化的轨迹方程为
(7)
对式(7)求一阶导数得成穴铲质心F的速度,有
(8)
对方程组(7)求二阶导数,得成穴铲质心F的加速度,有
(9)
其中,θ1=ωt、θ2=ωt+θ代入式(7)~式(9),得到成穴铲质心F点的运动轨迹、运动速度及其加速度为
(10)
(11)
(12)
通过上述分析,获得成穴铲质心F的位移、速度及加速度模型。由其轨迹方程(10)得:成穴铲质心F的轨迹的x方向的位移响应曲线是振幅为l1和l2的两个余弦曲线与斜率为V的一次函数的叠加;y方向的位移曲线是以(l5+l6)为基准,振幅为l1和l2的两个正弦曲线的叠加。由速度方程(11)得:成穴铲质心F的x方向速度响应曲线是以前进速度v为基准,振幅为-l1ω和-l2ω的两个正弦曲线的叠加;y方向的速度响应曲线是振幅为l1ω和l2ω的两个余弦曲线的叠加。由加速度方程(12)知:成穴铲质心F点的x方向的加速度响应曲线是振幅为l1ω2和l2ω2的两个余弦曲线的叠加;y方向的加速度响应曲线是振幅为-l1ω2和-l2ω2的两个正弦曲线的叠加。
3 基于ADAMS的运动仿真与分析
Adams(Automatic Dynamic Analysis of Mechanical System)是美国MDI公司开发的虚拟样机分析软件,可以自行创建机械系统几何模型,也可以将已有的三维模型,如solidworks、Pro/Engineer、UG等三维模型转换格式导入,通过添加约束、载荷,创建机械副等实现模拟仿真,并进行静力学、运动学和动力学分析,输出位移、速度、加速度等曲线,可减少产品的研发生产周期及成本[7-9]。
3.1 几何建模
利用SolidWorks对成穴机构进行三维建模。转化格式为Parasolid.x_t导入ADAMS软件中,用布尔运算将固定支架各零件约束为整体,成穴铲柱各零件约束为整体,在ADAMS存在7个part,即导轨、固定支架、曲轴、连杆、两平行摇杆、成穴铲部装。
3.2 添加约束
添加各杆件材料属性为steel,创建曲轴与固定支架、连杆与曲轴、连杆与平行摇杆、摇杆与运动架为转动副;固定支架与导轨为移动副。在固定支架与滑动导轨的移动副上,添加驱动为匀速直线运动;在曲柄的旋转副上,添加一个匀速旋转驱动。根据实际移栽机作业速度,设置成穴机构前进速度0.3m/s,由传动比知,对应曲轴转速为36r/min(144°/s)。添加约束和驱动后成穴机构模型如图4所示。
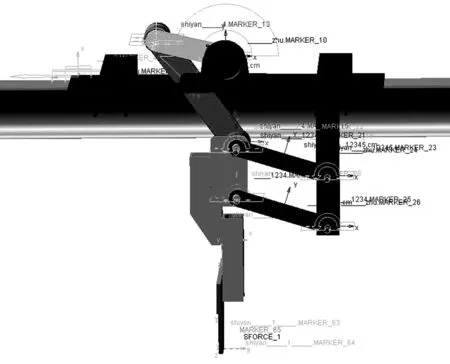
图4 添加约束和驱动Fig.4 Adding constraints and drive
3.3 仿真结果分析
在ADAMS中对成穴机构进行运动学仿真,得到成穴机构仿真轨迹,如图5所示。
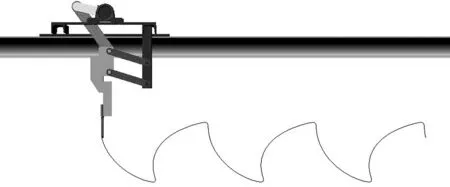
图5 成穴机构运动轨迹Fig.5 Movement path of hole mechanism
由图5可知:成穴机构的运动轨迹是移栽机前进运动与成穴铲垂直于垄面的往复合成运动。由轨迹可知:成穴机构的设计基本满足烟草钵苗移栽机的成穴几何参数要求。由于在仿真软件中模拟的轨迹为成穴机构理论轨迹,实际作业中,还需要考虑土壤回流及成穴铲尺寸形状等因素。
3.3.1 成穴铲位移分析
以横坐标为时间、纵坐标为位移,仿真成穴周期为0~2.0s,得到成穴铲位移曲线,如图6所示。
由图6可知:随着成穴部件运动,x方向的位移基本呈线性增加,y方向位移先减小后增大,然后再减小,类似正弦曲线;在0~0.5s内,成穴铲处于向下运动伸入土壤成穴阶段;在0.5~1.0s内成穴铲处于回程阶段,此时成穴铲从下始点向上始点运动;在0.6~0.75s下始点附近,1.5~1.65s上始点附近,x方向位移基本保持不变,此时间段内成穴铲在曲轴的驱动下有与机具前进方向相反的向后运动,故位移略有抵消。成穴铲y方向位移行程约为276mm,满足成穴机构的成穴要求。

(a) 成穴铲x方向位移曲线

(b) 成穴铲y方向位移曲线

(c) 成穴铲合位移曲线图6 成穴铲位移曲线Fig.6 The displacement curve of hole mechanism
3.3.2 成穴铲速度分析
成穴铲尖点的运动速度曲线如图7所示。成穴铲形成穴坑是靠机具前进运动与成穴铲竖直方向的运动合成共同作用所形成。由图7(c)成穴铲合速度可知:速度先增大后逐渐减小,直至0.6s时,速度达到最小值,此时为成穴铲运动的下始点位置;随后成穴铲向上运动,回程速度先增大后缓慢减小,在1.5s时,到达成穴运动上始点位置后,曲线上升,速度逐渐增大,完成一个成穴周期。
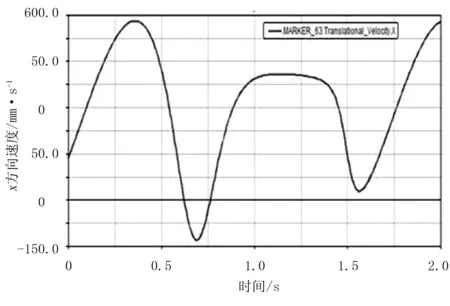
(a) 成穴铲x方向速度曲线

(b) 成穴铲y方向速度曲线
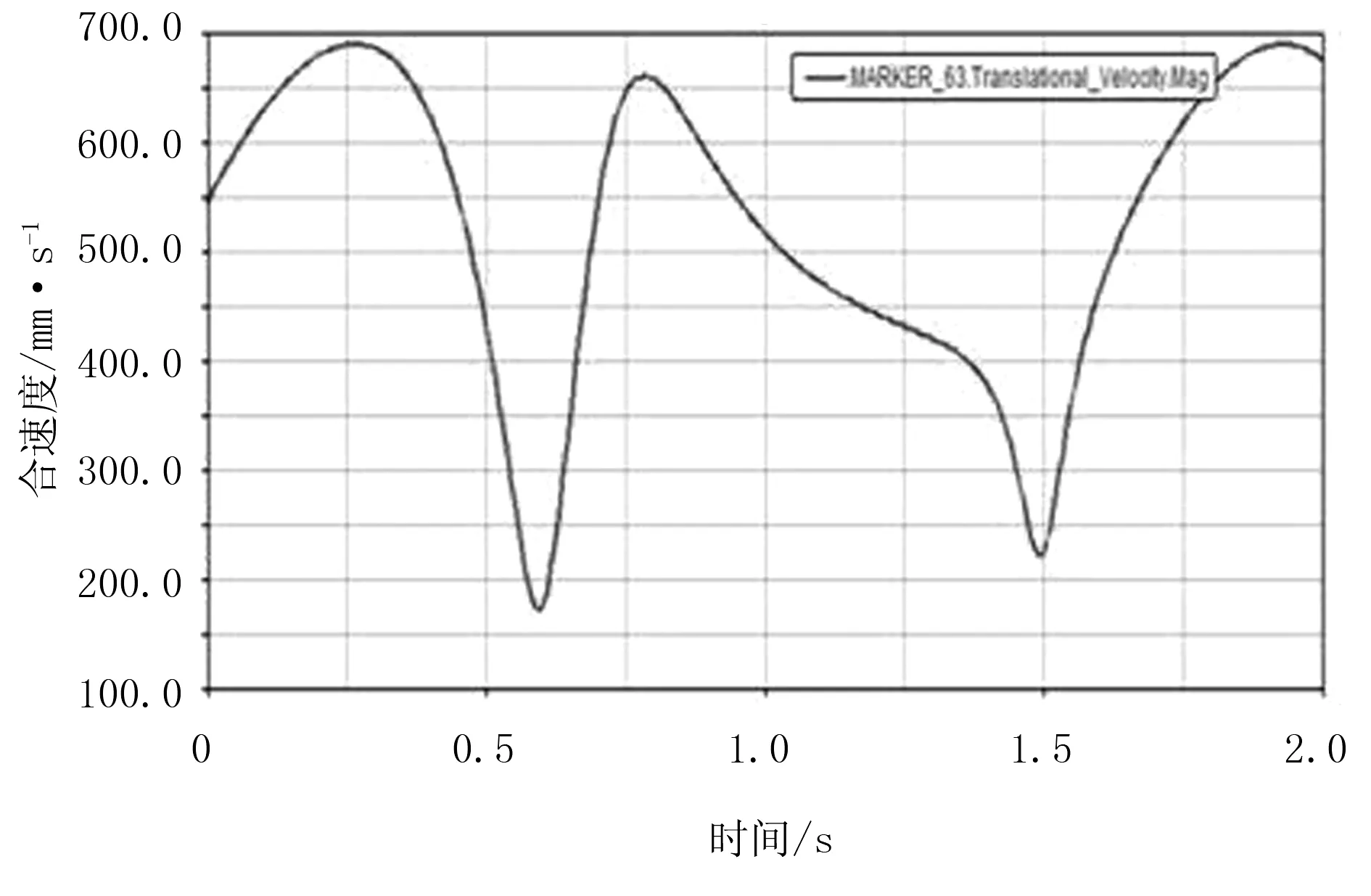
(c) 成穴铲合速度曲线图7 成穴铲速度曲线Fig.7 Movement path of hole mechanism
3.3.3 成穴铲加速度分析
成穴铲的加速度曲线如图8所示。由图8(a)可知:在0.6s,即下始点位置时,y方向正向加速度最大,x方向负向加速度达到一个最小值;在1.5s时,x、y向负向加速度都达到另一个极点值。合加速度先缓慢减小后增大,当成穴铲运动到下始点时,曲线迅速下降,加速度逐渐减小;在成穴铲的回程过程中,成穴铲运动到上始点前,曲线加速上升,最高点为成穴铲运动极限位置,此时加速度最大,随后曲线下降。
通过分析可知:成穴铲质心F点的位移、速度、加速度变化平稳,响应曲线无较大冲击及剧烈波动现象,可以满足成穴机构设计要求。由于成穴机构运动与各构件的长度、曲轴转速、前进速度有关,所以对各曲线分析得到的参数规律可以成为成穴机构的改进设计依据[10]。

(a) 成穴铲x、y方向加速度曲线

(b) 成穴铲合加速度曲线图8 成穴铲加速度曲线Fig.8 The acceleration curve of hole mechanism
4 结论
1)对成穴机构进行简化,建立了各铰接点的矢量方程及运动学模型,并对其运动轨迹进行理论分析。
2)通过基于ADAMS的成穴机构进行仿真,得到成穴铲质心的位移、速度及加速度等响应曲线,满足烟草钵苗移栽穴坑成穴的农艺要求。
3)仿真分析真实地观察了成穴铲的运动过程,通过改变成穴机构的各杆件长度及位置,实现了成穴机构运动轨迹的优化。运动规律和运动特性分析表明:其满足成穴机构设计要求,可以成为成穴机构轨迹优化及改进设计依据。
[1] 卢永涛,李亚雄,刘洋,等.国内外移栽机及移栽技术现状分析[J]].新疆农机化,2011(3):29-32.
[2] 林选知,董哲,张瑞勤,等.烤烟人工移栽及机械移栽工艺对比[J].安徽农业科学,2011,39(31):19075-19077.
[3] 吴畏,孙松林,肖名涛.我国移栽机械的现状与发展趋势[J].农业技术与装备,2013(6):2-10.
[4] 于向涛,胡良龙,胡志超,等.我国旱地移栽机械概况与发展趋势[J].安徽农业科学,2012,40(1): 614-616.
[5] 方宪法.我国旱作移栽机械技术现状及发展趋势[J].农业机械, 2010(1):35-36.
[6] 贺智涛,郑治华,刘剑君,等.膜上移栽机的发展现状及存在的问题[J].农机化研究,2014,36(9):252-255.
[7] 赵匀.农业机械分析与综合[M].北京:机械工业出版社,2008:136-139.
[8] 陈德民,槐创锋,张克涛,等.精通ADAMS 2005/2007 虚拟样机技术[M].北京:化学工业出版社,2010.
[9] 魏丽娟,赵武云,牛海华.基于ADAMS的4UD-600型马铃薯挖掘机振动机构的参数优化设计[J].干旱地区农业研究,2015,33:278-282.
[10] 中国农业机械化科学研究院.农业机械设计手册[K].北京:机械工业出版社,1990.
Kinematic Analysis and Simulation of Cavitation Mechanism of Tobacco Seedling Transplanter
Dong Xin, Yang Bo, Xu Yunfei, Shao Fei, Na Mingjun
(Engineering College,Northeast Agricultural University,Harbin 150030,China)
Performance of cavitation mechanism of basket tobacco seedling transplanter directly affects the quality of tobacco seedling transplanting.By simplifying the cavitation mechanism and establishing the vector equation, exploring the mechanism of the interaction between the various members of the cavitation mechanism and movement law of the spade and obtaining displacement, velocity and acceleration model of the spade.Using ADAMS software built into3D motion simulation model of the cavitation mechanism and simulate.The change curves of displacement, velocity and acceleration in the vertical and horizontal direction of the spade are analyzed, and the rationality of the structure design of the hole forming mechanism is verified. It provides a theoretical basis for the further optimization and dynamic simulation analysis of the movement locus of the transplanting mechanism of tobacco pot seedling transplanting machine.
tobacco seedling transplanting; cavitation mechanism; kinematic analysis; simulation
2016-05-12
黑龙江省应用技术与开发计划项目(GC13B604)
董 欣(1962-),女,吉林德惠人,教授,硕士,(E-mail)Dongxin@neau.edu.cn。
S223.92
A
1003-188X(2017)03-0037-05
猜你喜欢
奥秘(创新大赛)(2023年3期)2023-05-06 01:48:20
林业科技(2020年3期)2021-01-21 08:28:38
江西农业大学学报(2020年6期)2021-01-08 02:35:38
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
农机化研究(2019年7期)2019-05-24 09:48:24
农业工程学报(2018年9期)2018-06-01 08:46:00
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
浙江中西医结合杂志(2017年2期)2017-01-12 18:23:59
