
捆草机电气控制系统的设计研究—基于MCGS与单片机技术
2017-12-16 07:01:53邢小琛宣传宗马彦华
农机化研究 2017年6期
邢小琛,武 佩,刘 宇,宣传宗,马彦华
(内蒙古农业大学 机电工程学院,呼和浩特 010018)
捆草机电气控制系统的设计研究
—基于MCGS与单片机技术
邢小琛,武 佩,刘 宇,宣传宗,马彦华
(内蒙古农业大学 机电工程学院,呼和浩特 010018)
以呼伦贝尔市蒙拓农机科技股份有限公司生产的9YG-1.3型圆草捆打捆机为样机,针对其控制部分存在自动化程度低、草捆边缘布网太松、操作繁琐及需人工手动计数等问题,运用昆仑通态MCGS编程软件和Keil uVision4软件,设计了一款以单片机系统为控制核心,以MCGS触摸屏为人机界面,配备各种相应传感器和控制输出硬件的自动控制系统。该系统通过人机监控界面,实现了对捆草机运行状况的实时监控。试验结果表明:本控制系统有效地解决了捆草机的灵活布网问题与计数问题,并可以实时进行停车、开仓门、关仓门与报警声亮提示,提高了捆草机的工作效率和自动化水平。
捆草机;控制系统;MCGS;布网控制
0 引言
牧草的打捆收获不仅运输、存储方便,而且也有利于保持草的营养价值。随着我国农牧业机械化水平的不断提高,以及国家对农牧业机械购置补贴力度的加大,捆草机的需求量很大[1]。
在国外,牧草打捆机的电气控制系统广泛采用PLC、工业电脑及单片机等控制器作为控制核心,具有友好的人机界面。以PLC为控制核心的控制系统稳定,抗干扰能力强;工控电脑适用于高度自动化的牧场;单片机成本低,编程灵活,体积较小而且容易集成。德国克拉斯公司生产的Rollant系列圆捆机,采用视觉指示器、信号灯和电子指示器,具有草捆密度可调等特点。美国约翰迪尔公司生产的447型圆捆机,采用BaleTrakTM正面监视器和打捆张力调节系统,具有良好的操作性、安全性和打捆一致性[2]。而我国的捆草机总体的自动化程度不高,在实际使用过程中,若想实现高效捆草,必须要求捆草司机具有足够的工作经验[3-4]。
本文设计的自动控制系统,在有效抗干扰的同时,可以灵活控制布网,并且实时显示整车捆草的运行状态,以达到更加高效的捆草目的。
1 捆草机结构和工作流程
由图1可以看出:捆草机通过传动机构进行动力传动。在机器工作过程中,捡拾器将地面牧草拾起,通过喂入机构进入成捆室,在旋转滚筒的作用下首先形成草芯,随着更多牧草的进入,草芯逐渐形成圆草捆;牧草在圆草捆外围继续缠绕,草捆压力不断增大,当压力值达到预设值时,形成了一个完整的草捆。操作者通过压力表判断当草捆制作完成时,便通过控制捆绳机构对草捆开始捆绳,捆绳结束后,仓门打开,将草捆落在地面,完成一个工作循环[5-6]。

1.捡拾器总成 2.牵引架总成 3.卷压机构总成 4捆绳机构总成 5.液压系统 6.传动机构 7.仓门 8.行走轮总成图1 捆草机总体结构示意图Fig.1 Bale overall structure diagram
2 捆草机存在的问题
本文以呼伦贝尔市蒙拓农机科技股份有限公司生产的9YG-1.3型圆草捆打捆机作为研究对象,该机在实际使用中存在以下3个问题:
1)草捆压力是否能够达到预设值主要由操作者观察牵引车上的油压表来判断,通常油压达到10个大气压时草捆的压力才会达到预设值。然而,油压不容易控制,过大时会导致牵引车超负荷工作,甚至被憋灭,过小时则会导致草捆质量不合格。所以,整个打草过程对操作者的要求较高。
2)在对草捆进行捆绳过程中,存在捆不紧、捆绳间距不能灵活控制及更换捆绳繁琐的问题。这样捆出来的草捆大都质量不合格,而且工作效率差。
3)不能高效地记录与保存草捆的个数。
3 控制系统的设计
3.1 控制要求分析
为了解决该捆草机目前所存在的问题,拟采用单片机可编程控制器编制灵活的程序,对收集草过程、捆草过程及计数过程进行程序化自动控制。
控制系统由软件部分和硬件部分组成。其中,硬件部分包括MCGS触摸屏、单片机系统、中间继电器、计数传感器,仓门检测传感器、调压器、布网检测传感器和手动控制开关;软件部分主要是由MCGS嵌入式组态编程软件和单片机编程软件组成。
3.2 硬件设计与选型
本系统的I/O主要包括4个开关量输入和2个开关量输出。系统的硬件部分主要由核心处理器单元、数据采集模块、通信模块及输出控制模块组成,如图2所示。
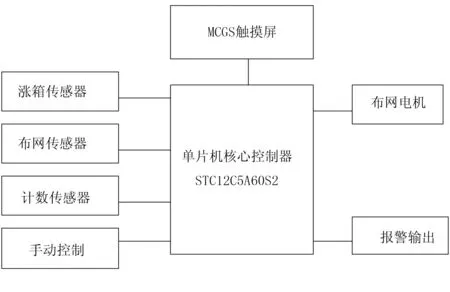
图2 系统结构图Fig.2 System Block Diagram
1)处理器选择STC公司的STC12C5A60S2。该处理器带有EEPROM功能,可掉电存储数据,有看门狗,中断优先级有4种状态并且可定义,同时还拥有两个串口。
2)通信模块采用美信公司的MAX232芯片,是专为RS-232标准串口设计的单电源电平转换芯片[6]。
3)输入输出模块分别采用光电耦合器和继电器。为了保证输出控制继电器的稳定性、抗干扰能力和可靠性,系统通过驱动芯片ULN2003来接收光耦信号驱动继电器。
4)TPC选择昆仑通态MCGS的触摸屏,具体型号为TPC7062TX,是一套以Cortex-A8 CPU为核心的嵌入式触摸屏。该产品设计采用了7英寸液晶显示屏和电阻式触摸屏,并预装MCGS嵌入式组态软件,且拥有RS-232和RS-485接口,具备图像显示和数据处理功能。
3.3 工作流程
捆草机启动后,整个控制系统上电启动,开始初始化系统,控制器和触摸屏开始通信,读取历史总捆草数,开始记录工作时间,并设定布网延时时间同时保存为默认值,完成启动。整机开始工作,即开始捆草,等待仓门检测传感器的信号。当涨箱传感器被触发时,置于拖拉机控制室内的声光报警提示司机停车;停车后,达到布网延时设定值后,开始布网,可手动布网,也可以自动布网;布网结束,提示打开放草捆仓门,待打开仓门以后,草捆自动滚落,触发计数传感器,并进行一次计数;完成计数后,提示关闭仓门,完成整个过程。
3.4 程序设计
整个控制系统运用Keil uVision4软件进行程序设计。软件程序系统主要包含主程序、通信程序、捆草程序、计数采样与消抖程序和手动控制子程序。主程序根据捆草机的具体工艺流程采用顺序控制方法编写,具有自动初始化功能,并且有软件看门狗,保证对程序的正确引导,防止程序跑飞,提高系统稳定性。主程序控制流程如图3所示。
51单片机提供了一个全双工标准接口,通过电平转换芯片MA X232及外围电路来实现信号电平信号之间的转换,实现与触摸屏串口硬件通信通道连接,通过编写设备驱动程序,实现基于51单片机的设备与上位组态软件的数据交互[7]。其接口结构如图4所示。
在 MCGS中与进行串口通信时,相关的设备必须通过调用串行通信父设备。MCGS把包括波特率大小、数据位长度、停止位位数、有无奇偶校验等复杂的对串口参数的设置、初始化与读写操作全部封装在 MCGS系统提供的串行通讯父设备中;创建通信子设备的驱动程序时,主要是对串行端口进行操作,通过调用父设备提供的标准串口读写函数ComOutDat/ComInDat,即可开发编程通讯子设备驱动程序的工作。单片机接收数据采用串口中断方式,当接收到开始符时,则从开始符的下一位开始接收数据,按照通讯协议,开始符的下一位是通道号,后面是数据位,接收到结束符时表示数据接收完毕。通道号和数据存储在数组中,供用户处理[7-8]。

图3 程序流程图Fig.3 Program flow chart

图4 通信接口结构图Fig.4 Communication Interface Block Diagram
3.5 人机界面MCGS组态设计
MCGS (通用监控系统) 是昆仑通态公司的用于快速构造和生成监控系统的组态软件。它基于WindowsCE平台的组态程序,通过对现场数据的采集与处理,通过动画显示、报警处理、流程控制和报表输出等多种方式向用户提供解决实际工程问题的方案,在自动化领域有着广泛的应用。MCGS 嵌入式体系结构分为组态环境、模拟运行环境和运行环境3 部分。组态环境和模拟运行环境相当于一套完整的工具软件,可以在PC 机上运行,用户可根据实际需要裁减其中内容,可帮助用户设计和构造自己的组态工程并进行功能测试。由MCGS 嵌入版生成的用户应用系统,由主控窗口、设备窗口、用户窗口、实时数据库和运行策略5个部分构成,如图5所示。
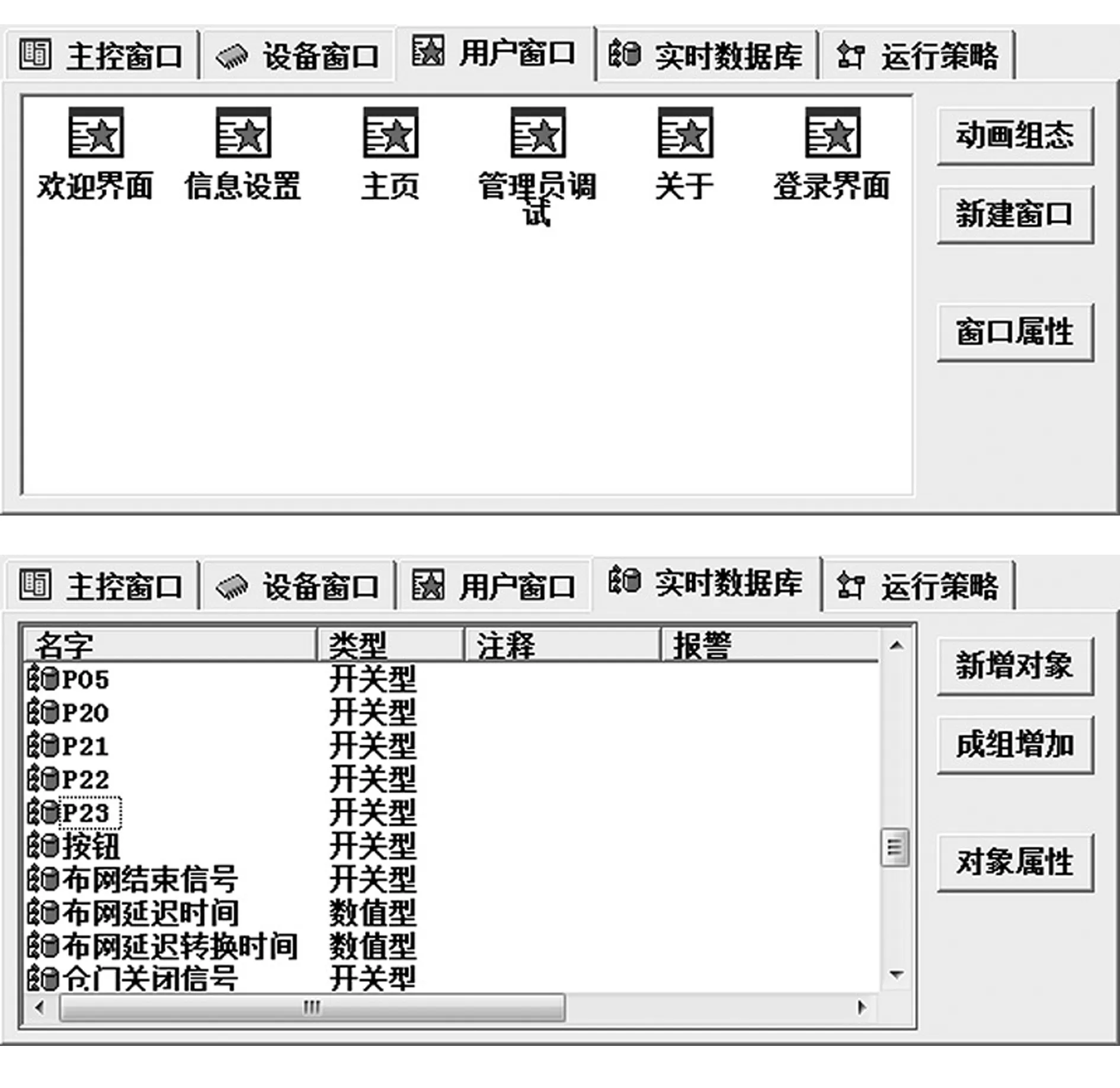
图5 MCGS组成部分Fig.5 MCGS part
在信息界面中,可以实时显示本次开机总共打草的草捆数及本台机器总共的打草总草捆数,还可显示工作时间及布网时间的设定,如图6所示。
在动画显示主页面中(见图7),根据整机运行过程的实际情况,来显示当前的运行情况。当正常运行到应停车时,界面显示停车并在控制室内进行声亮报警提示,停车后系统在等待一个布网延迟时间;若无手动布网信号,则开始自动布网,布网结束时提示打开仓门,放下草捆后计数并提示关闭仓门,系统运行结束。
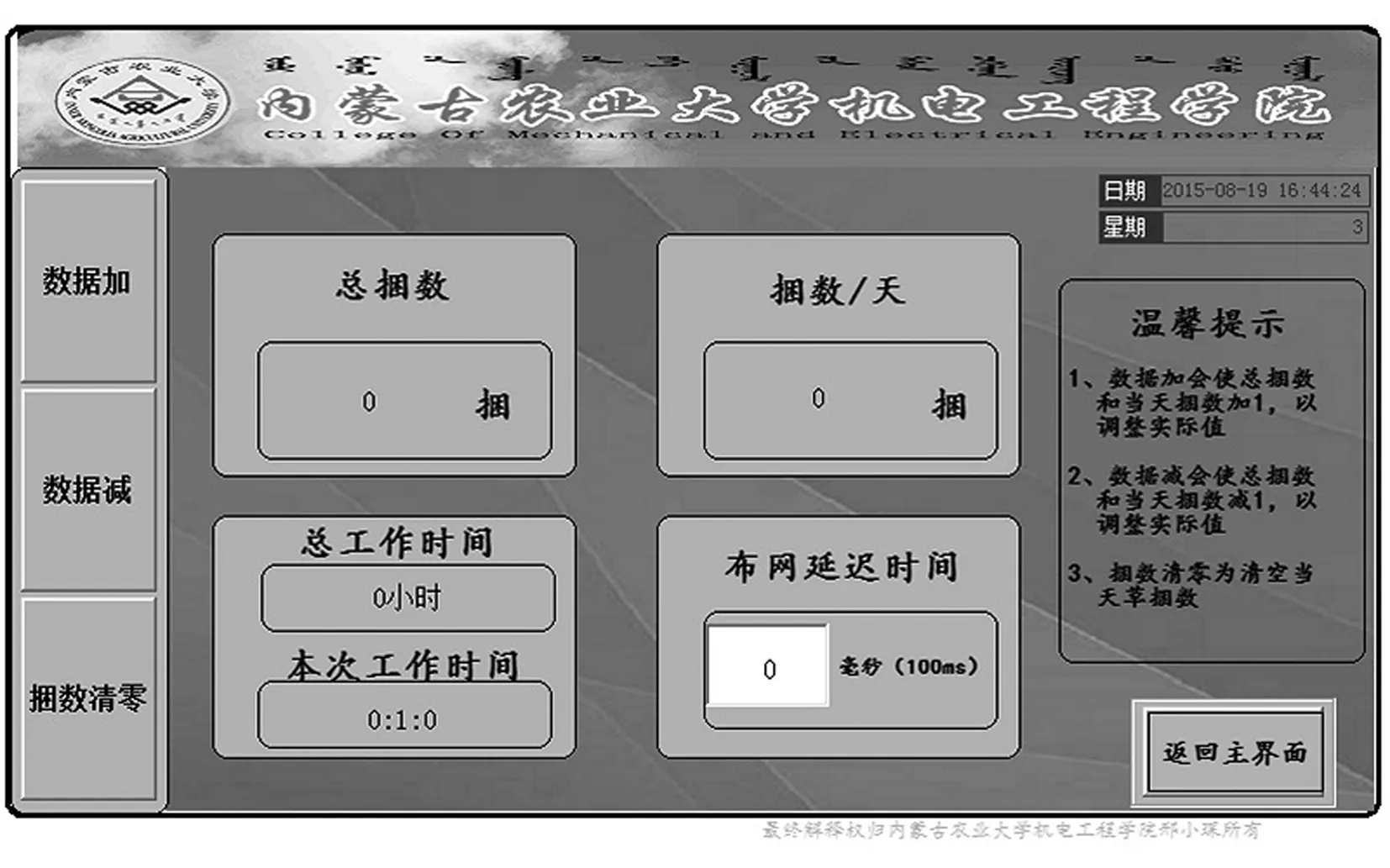
图6 信息设置页面Fig.6 Settings page
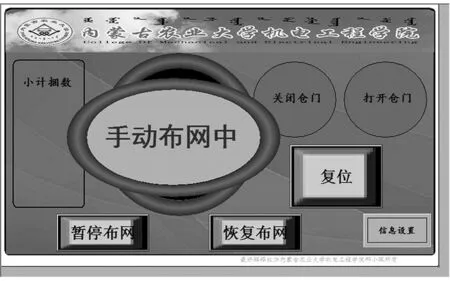
图7 动画显示主页面Fig.7 Animation Home Page
4 试验分析
在完成整个控制系统后,对捆草机进行了模拟测试、空机测试和捆草试验。在模拟测试试验和空机测试中,主要测试整个工作流程指令执行的准确性、稳定性和鲁棒性。在实验室环境下,共进行20次模拟运行,然后进行了30次空机运行,整个工作顺序准确率均达100%;当有外部干扰和突发状况发生时,紧急暂停整个程序的正确率也达100%。
捆草试验2015年9月6日在内蒙古呼伦贝尔市鄂温克族自治旗草场进行,测试用草为当地牧草,打捆个数为10,草捆直径为1.2m,草捆长度为1.4m,质量为300kg,草捆的完整性良好,成捆率达100%;布网形式为绕线布网,布网圈数为10,手工布网可控成功率达100%(达到设定圈数即为合格),布网完整性100%,布网尾部处理合格率达90%,计数准确率为100%,达到了设计预计要求。试验结果如表1所示。

表1 打捆试验数据

续表1
本试验中,操作者仅需提醒停车、结束、继续前行即可,从停车到放捆计数总共用时平均约为48s;而操作者的操作熟练程度不同,实际效率也不同,在本次试验过程中,操作者用时平均为50s左右。
试验过程中,整套装置运行安全可靠、操作方便,达到了设计要求。
5 结论
经试验验证,本文研究的捆草机控制系统在技术上是可行的。该系统不仅解决了捆草机捆草布网不灵活的问题,还可以高效、准确地记录与保存草捆的个数,在提高了捆草机工作效率的同时也减轻了捆草司机的工作量。总的来说,本套系统具有使用方便、操作快捷、故障率低及运行稳定等特点,达到了预期的设计目的。
[1] 刘振营.呼伦贝尔农机人实现梦想的地方[J].农业机械,2011(9):34-44.
[2] 肖章,刘亮东,王光辉,等.基于PLC的青贮圆草捆打捆机控制系统设计[J].中国农业大学学报, 2013, 18(6): 175-179.
[3] 操子夫,赵婉宁,杨雨林,等.园捆打捆机研究现状与发展趋势[J].农业与技术,2014,34(11):38,69.
[4] 华荣江,唐遵峰,叶红艳,等.国内外圆捆机械研究与发展趋势[J].中国农机化,2012(3):23-26.
[5] 王春光,敖恩查,邢冀辉,等.钢辊外卷式圆捆打捆机设计与试验[J].农业机械学报,2010,41(S1):103-106.
[6] 王春光.钢辊外卷式圆捆机结构与原理[J].农业机械,2008(34):43-45.[7] 王晓光.基于MCGS的51系列单片机通用驱动程序设计[J].仪表技术与传感, 2010(5):38-40.
[8] 潘峥嵘, 张岩, 郭凯.基于 MC G S 的 C 8051F 020单片机驱动程序的设计与应用[J].微计算机应用, 2009, 30(2):48-52.
Abstract: In this paper, an automatic control system was developed for the silage round baler 9YG-1.3 manufactured by the Mengtuo Agricutural-Machinery Technology Co. Ltd, for solving the problems of the low-degree automation, too-loose edge of bale, too complicated operation and manual counting bales. The system was designed by using the MCGS as well as the Keil uVision4 software programs, using the SCM system as the core, the touch screen as the human-computer interface, and various sensors and corresponding control output hardware. Through the man-machine monitoring interface, the system realized the real-time monitoring of the running status of the silage round baler. The tested results show that the control system has effectively solved the existed problems for the questioned silage round baler , realized the baling door open or close and light alarming in real time , and raised the working efficiency.
ID:1003-188X(2017)06-0219-EA
Design and Study on Electric Control System of Baler—Based on MCGS & Microcontroller Technology
Xing Xiaochen, Wu Pei, Liu Yu, Xuan Chuanzong, Ma Yanhua
(College of Mechanical and Electrical Engineering, Inner Mongolia Agricultural University, Hohhot 010018, China)
silage round baler; control system; MCGS; net control
2016-05-10
国家自然科学基金项目(51165029);内蒙古“草原英才”产业创新人才团队项目(内组通字[2014]27号)
邢小琛(1991-),男,内蒙古包头土默特右旗人,硕士研究生,(E-mail)xc2444@163.com。
武 佩(1963-),男,内蒙古化德人,教授,博士生导师,博士,(E-mail)jdwp@imau.edu.cn。
S817.11+5
A
1003-188X(2017)06-0219-04
猜你喜欢
装备制造技术(2020年11期)2021-01-26 00:39:12
河北农机(2020年10期)2020-12-14 03:13:42
草堂(2019年11期)2019-11-13 23:50:55
煤炭工程(2019年6期)2019-06-22 09:04:44
凿岩机械气动工具(2017年2期)2017-07-19 10:21:13
工业设计(2016年11期)2016-04-16 02:49:22
通信电源技术(2016年5期)2016-03-22 01:10:02
地矿测绘(2015年3期)2015-12-22 06:27:26
中国铸造装备与技术(2015年5期)2015-12-10 10:23:41
中学科技(2015年9期)2015-09-10 05:51:02
