
一种平台式剑麻收获机的设计
2017-12-16 09:15:51张宝珍樊军庆张志强
农机化研究 2017年5期
蔡 毅,张宝珍,樊军庆,张志强,刘 磊
(海南大学 机电工程学院,海口 570228)
一种平台式剑麻收获机的设计
蔡 毅,张宝珍,樊军庆,张志强,刘 磊
(海南大学 机电工程学院,海口 570228)
本设计从剑麻本身的特征以及剑麻种植的规模着手,结合目前农业机械的设计理念,实现了剑麻机械化收获。该机主要由工作平台、分叶机构、割叶机构和液压控制系统等关键部件组成,依据其工作平台轨道、分叶爪及割叶刀具等主要结构和工作原理,对液压系统进行了具体参数设计。该机解决了剑麻收割费时费力的问题,填补了国内机械化收割剑麻的空白,对推动剑麻产业的发展意义重大。
剑麻收获;工作平台;分叶爪;割叶刀具;液压系统
0 引言
剑麻,是一种常见的龙舌兰属植物,麻茎短粗,麻叶呈莲座式排列,一般在开花之前,每株剑麻可以长叶约200~250片,其叶刚直、肉质且呈剑型,是当今世界用量最大和范围最广的多年生叶硬质纤维作物。剑麻不仅可以应用于渔航、工矿、运输、装饰材料等各种规格绳索,而且还有很重要的药用价值[1]。
剑麻的加工无论初加工还是深加工,均有相应的机械研究成果,并且投入了实用当中[2]。剑麻目前的收获方式还是人力收获,效率特别低。剑麻的割叶不仅要保证留叶的数量,还要保证不要损害未成熟叶片的叶基,否则会影响剑麻的再生长,影响剑麻下一季收割的产量。剑麻的叶基排列并不是均匀地圆弧线排列,而是呈累叠式排列,加大了机械化收割的难度。
华南热机化所潘煜荣[3]的设计构思包含底盘、组合平行四杆机构和工作头3部分,采用拖拉机牵引工作。其工作头装有沿圆弧轨迹运行的刀锯,可以完成一定数量的叶片切割工作。国外专门设计的车驱动旋转刀架从整排剑麻上面行驶而过,刀架可以左右移动以改变半径来切割麻叶,操作人员可以在车上面就对剑麻收割进行操作,省力而且效率也会有提高[4]。该设计仍然采用刀具由下向上割叶,不能避免损害剑麻叶基。
针对以上不足[5],设计了机械收割平台,由拖拉机牵引,平台上安装的分叶机构可把未成熟的麻叶收拢包裹成圆柱状,由割叶机构控制旋转刀锯的运动轨迹,从上往下割叶,保证剑麻叶基的安全。该剑麻收获机的设计对促进剑麻产区的机械化收获有很好的借鉴价值。
1 剑麻收获机的总体设计
剑麻收获机包括工作平台轨道、分叶机构及割叶机构;工作平台承载分叶机构和割叶机构,用拖拉机牵引工作,如图1所示。
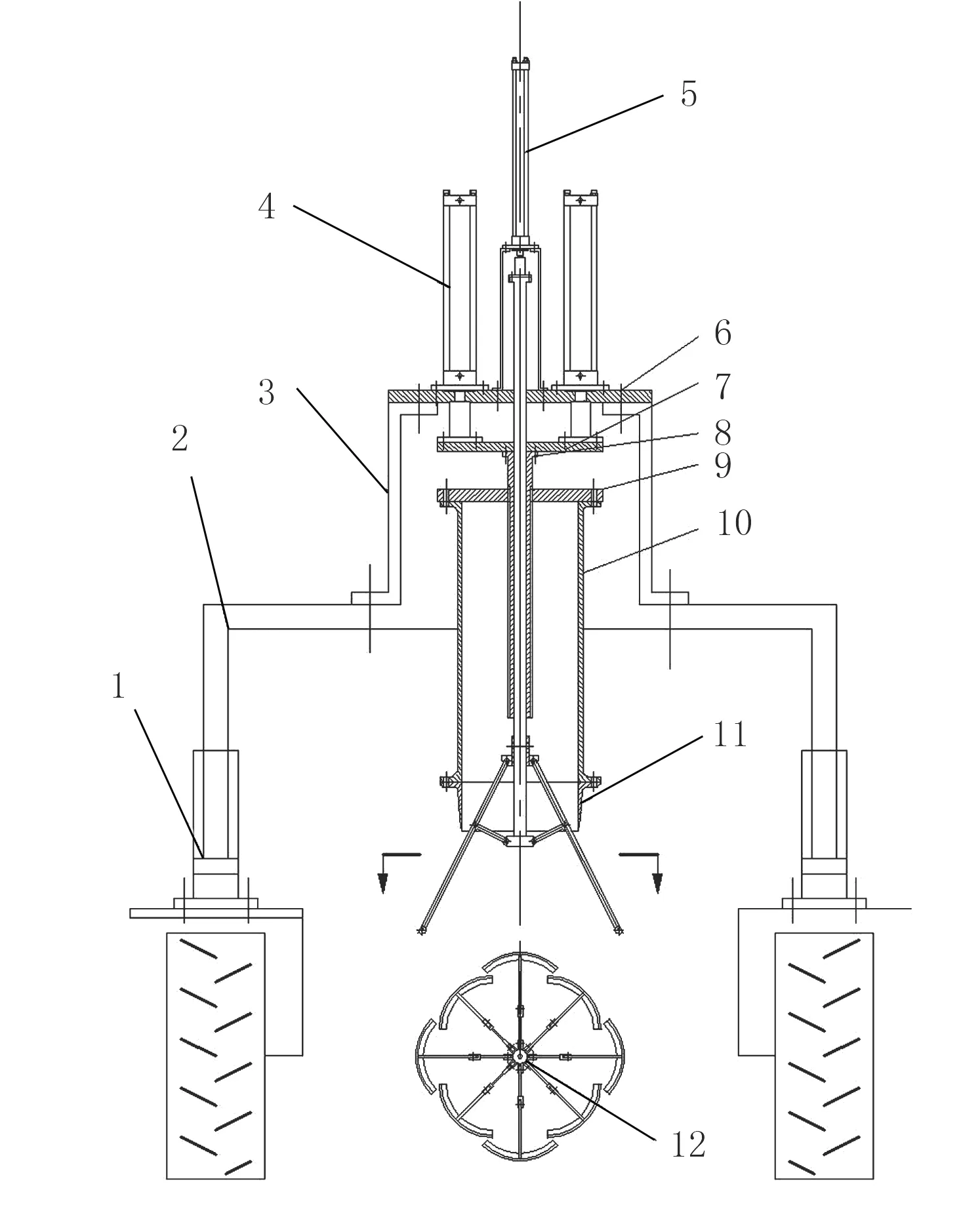
1.平台升降液压缸 2.工作平台 3.支撑架 4.同步液压缸组1 5.中心液压缸 6.板1 7.板2 8.中心主轴 9.板3 10.刀架 11.环形刀具 12.分叶手
当操作者准确定位一株剑麻后,分叶机构先把未成熟的麻叶收拢包裹成圆柱状与成熟的麻叶分开,然后利用液压缸推出圆筒式刀锯;当分叶机构把麻叶分开之后,圆环刀具在液压缸的推动下直接将麻叶“冲割”下来,即可完成麻叶的切割。
工作原理:首先,中心液压缸向下推出分叶机构,并把未成熟的麻叶抱拢与成熟麻叶分开;然后,液压缸组2推出,向下推出所有行程,把板2向下移动其行程的距离;接着,液压缸1推出,向下推动板3,板3推着刀架完成麻叶的切割。切割之后,液压缸组1向上回退其行程距离,板3恢复到原来位置;然后,液压缸组2回退其行程距离,板2也回到原来位置;最后,中心液压杆也回退其行程距离,使分叶机构也回到原来位置,完成了一株剑麻的收割;接着在工作平台上移动机器,进行下株剑麻的割叶工作。
分叶机构通过支撑架联接到工作平台上工作。该设计采用了两组同步液压缸和一个中心液压缸,通过3块板把割叶动作分成两次向下运动。板1固定在支撑架上,作为相对固定的一层;板1上固定有液压缸组2和中心液压缸,使其也相对固定不动。液压缸组2的推出杆联接着板2,控制板2的运动;板2上固定有中心主轴和液压缸组1,液压缸组2通过控制板2来控制中心主轴和液压缸组1的位置。液压缸组1的推出杆联接着板3;板3上联接着刀架,且板3套在中心主轴上,以中心主轴为导向轴上下运动。液压缸组1通过控制板3来控制刀架以及环形刀具上下割叶运动。中心液压缸的推出杆联接着分叶机构的推杆,控制分叶机构的张开收拢与上下运动。技术参数如表1所示。

表1 主要技术参数
2 关键部件设计
2.1 工作平台轨道设计
目前,剑麻的种植密度应根据土壤、气候、地势、栽培管理水平及机械化程度来定,既要充分利用土地提高产量,又要方便管理、收割和运输。剑麻的种植分为单行和双行,目前推广的是双行种植,这样不仅单位面积植株数多、产量高,而且方便管理[6]。目前,各地区麻地采用的行距有:3.24+1.2×1.2(大行距3.24m,剑麻双行种植图小行距1.2m,株距1.2m),每公顷种植3 750株;3.5+1.2×1.14,每公顷种植3 750株;3.5+1×1,每公顷种植296株。一般大行距采用3~3.5m,小行间距及株距采用1~1.2m,每公顷种植3 750~4 995株比较适合。本设计采用间距为3.5+1.2×1.2,每公顷种植3 750株的方案,采用双行种植,如图2所示。
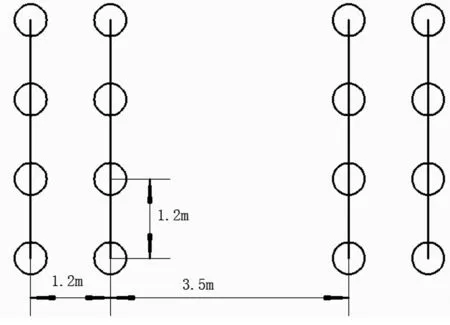
图2 剑麻种植间距
根据剑麻的种植密度及株行距,本设计采用一次收割多株的工作形式,即在工作平台上依照剑麻位置设置固定工作位若干[7]。拖拉机牵引工作平台一个工作距离后,各工作位进行微调,对待收割剑麻进行人工定位,故需要在工作平台安装前后左右各两条轨道以满足要求。工作台轨道设计如图3所示。

图3 平台轨道设计
沿剑麻种植方向在大平台上安装两排轨道,以实现收割机械的前后移动定位。本设计采用轻型轨道YB222-63:材质:Q235,55Q;规格24kg/m。长轨道上设有小平台,小平台上横向安装短导轨,以满足收割机械的左右移动。轨道轮选取型号X05,厚度55mm,直径80mm,材质铸铁,最大载荷800kg。
2.2 分叶爪的设计
采用雨伞骨架的设计原理,设计一个像雨伞那样可以张开合拢的机构,利用液压缸提供动力控制其展开与合拢,把不用收割的麻叶合拢包聚在一起与要收割的麻叶分开。分叶爪具体设计如图4所示。
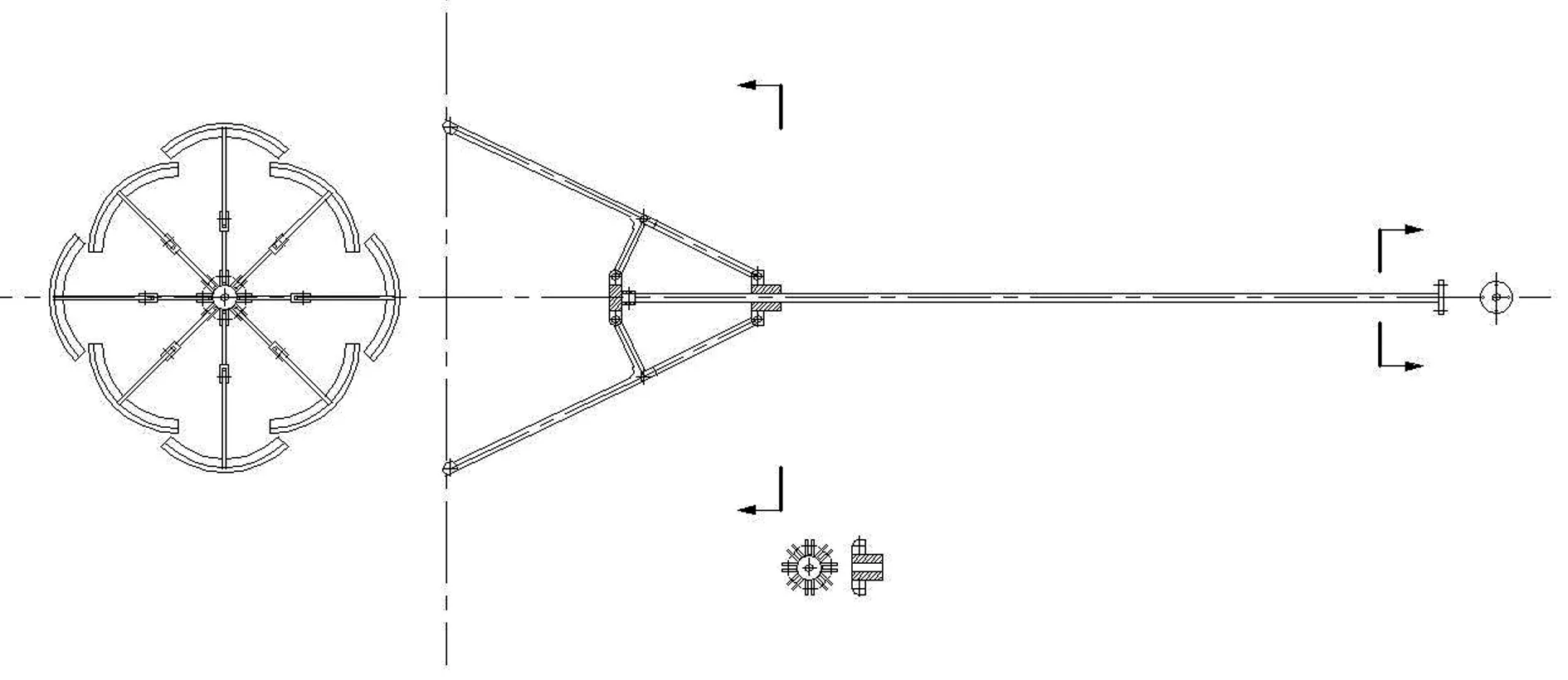
图4 分叶手结构图
撑杆是用来支撑分叶机构的,控制分叶爪的位置与张开合拢功能。根据设计需要,撑杆的长度设计为195cm、直径为2cm的圆柱杆。其顶端焊接有一个直径8cm、厚度1cm的法兰盘,用于与中心液压缸推出杆联接。底端用螺栓联接一个专门设计的套,用于控制“手”的工作,包括8条直臂和8条弯臂及1个滑动套和1个固定套。在设计上,根据目前已有数据,先设计为合拢时包拢直径为40cm,展开时直径可达80cm。为了保证可以把麻叶完全包住,设计为张开时形成两个半径不同的圆,直径分别为80cm和70cm。弯臂有长臂和短臂,长臂与弯臂垂直,臂宽2cm,厚1cm,长臂长50cm,短臂长145cm;直臂长30cm,分为大端和小端,大端要与弯臂联接,小端与滑套联接;弯臂长臂末端是直径为40cm圆环的1/4,这样当臂合拢时就能把麻叶聚拢。
2.3 割叶刀具的设计
刀座要安装环形刀刃,因此刀座设计为两个对称的圆弧形法兰盘,刀刃设计为圆环形刀,刀刃锋利,用M10螺杆联接在刀座上,刀座再与刀架联接。环形刀刃外径为51cm,内径为47cm,总长18cm,除了楔形刀刃,长8cm,如图5所示。
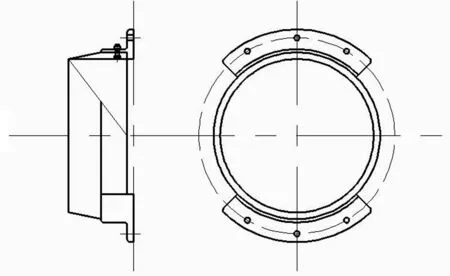
图5 刀座、刀刃组装
2.4 液压系统设计
根据设计需要选取5个液压缸,分别是两两同步的液压缸组1和液压缸组2及中心液压缸。根据每块板所要承受载荷的大小分析,液压缸组2受到的载荷最大,液压缸组1其次,中心液压缸最小。其具体大小有待实验考究[8]。液压系统原理图如图6所示。
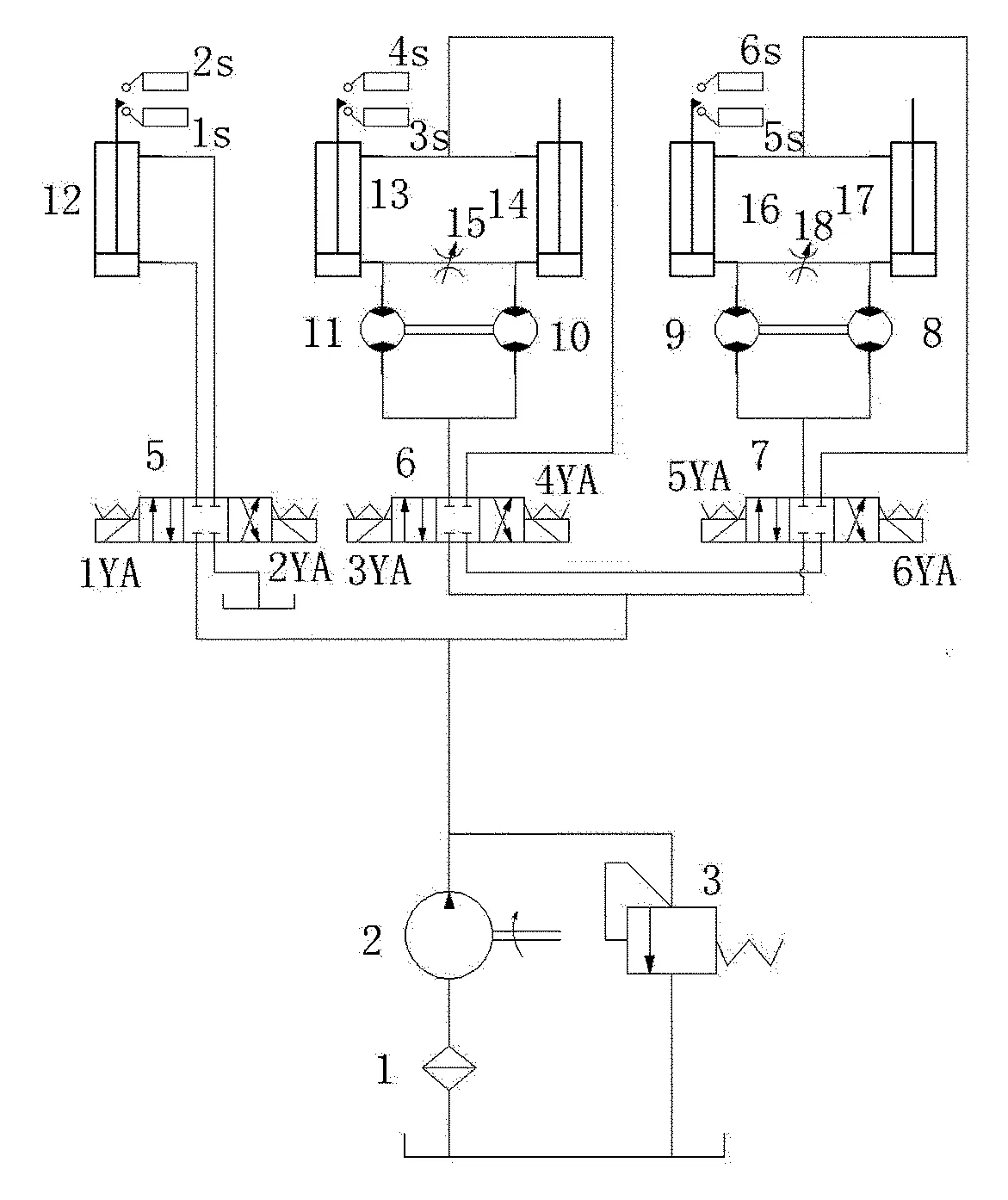
图6 液压系统原理图
用行程开关控制的多缸顺序动作,按启动按钮,使1YA得电,换向阀5左位工作,缸12(中心液压缸)的活塞向上移动,实现中心液压缸推出动作;到顶端端后,缸12推出杆触碰行程开关2s,使1YA断电、3YA得电,换向阀6左位工作,压力油进入缸13、14(同步液压缸组1)的无杆腔,其活塞上移,实现缸组1推出动作;到顶端后,缸13的推出杆触碰到行程开关4s,使电磁铁3YA断电,5YA得电,换向阀7左位工作,压力油进入缸16、17(同步液压缸组2)的无杆腔,其活塞上移,实现同步液压缸组2推出动作。到行程端点后,缸16的推出杆触碰到行程开关6s,使电磁铁5YA断电、6YA得电,换向阀7右位工作,压力油进入缸16、17的有杆腔,其活塞下移,实现液压缸组2收回动作;到行程端点后,缸16达到压力触碰到行程开关5s,使电磁铁6YA断电、4YA得电,换向阀6右位工作,缸13、14的活塞退回,实现同步液压缸组1收回动作;到行程端点后,缸13的推出杆触碰到行程开关3s,使电磁铁4YA断电,2YA得电,换向阀1右位工作,缸12的活塞向下退回,实现中心液压杆收回动作。中心液压缸到左端后,缸12的推出杆触碰到行程开关1s,使电磁铁2YA断电,即完成了一次顺序动作,重新按开关按钮,即可进入下一次顺序动作。此处实现液压缸同步采用了两个相同的液压马达刚性连接,通过液压马达来实现其同步,同步精度可达到95%以上[9]。
具体参数设计[10]如下:
1)液压缸。综合数据及工作要求,选取TG型伸缩式套筒液压缸,型号2TGV-E80×2200,伸出套筒外径80/60mm,总行程2 200mm,安装中心距1 500mm,额定压力16MPa;理论最大推力为首级78.45kN,末级44.13kN。
2)液压泵。确定液压泵实际所需工作压力:
管路的局部压力损失一般取0.5~1.5MPa,在系统的结构布局未定之前,可用局部损失代替总的压力损失,先选取总压力损失Δpt=1MPa,则泵的实际工作压力计算为
pp=p+Δp=17MPa
根据平台上升下降速度要求4m/min,所需最大流量为
选取液压系统的泄露系数kl=1.1,则所需输入流量为
qp=klqmax=12.44L/min
所以,4个液压缸总流量约为50L/min,并考虑到压力损失,选择63MCY14-1B型柱塞泵。
选取液压泵的总效率为η=0.8,则所需的液压泵的最大功率为
3)同步阀。根据选取液压缸的压力流量需求选择分流-集流自调式同步阀,可以双向同步,且能自动减少或消除误差。一级分流集流阀为FJL-B20H,二级分流阀为FJL-B10H。
4)油管及油箱。查钢管的公称通径、外径以及壁厚,连接螺纹和推荐流量表。在液压泵的出口,按流量60L/min,查表取管路通径为ф12.6,;在液压泵的入口,选择较粗的管道,选取管径ф15.5;一级分流集流阀出口油管按流量20L/min,选取管径ф10.3,其他油管按流量12.44L/min,查表取ф8.5。
油箱的容量一般取泵流量的3~5倍,本设计取4倍,其有效容积为
Vt=4qp=240L
3 田间试验与结果
2014年9月,在海南省昌江县十月田镇剑麻种植基地进行田间试验,配套动力为一台18kW拖拉机,试验作业面积0.2hm2,测试结果如表2所示。
田间试验结果表明:该平台式剑麻收获机在收获两行种植的剑麻时,可满足机械化收割剑麻叶片的设计要求,割叶数、留叶数及叶基留长量都达到了设计标准,且很好地降低了剑麻叶基的损伤率,达到使用要求。
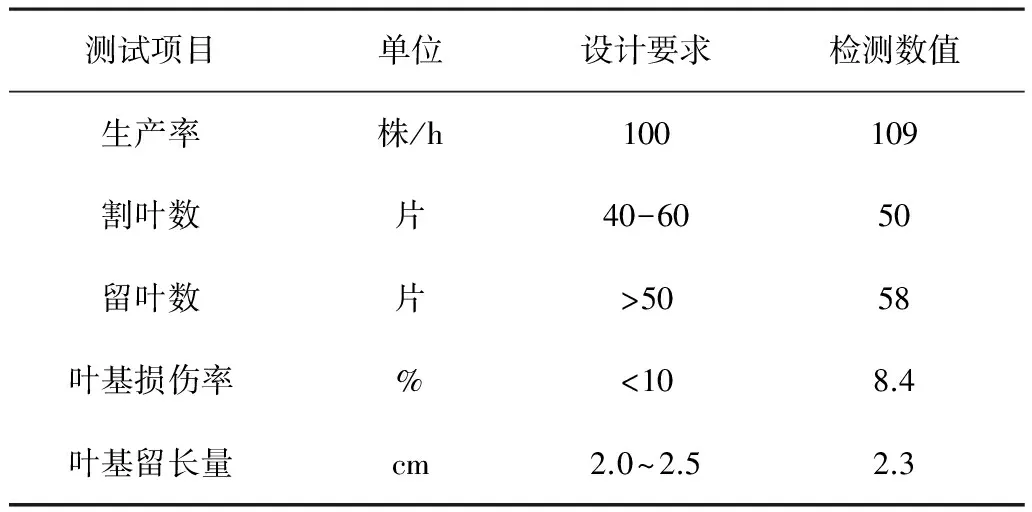
表2 平台式剑麻收获机试验结果
4 结论
基于剑麻机械化收获程度低的问题,设计了一种平台式剑麻收获机,对工作平台轨道、分叶机构及割叶机构等关键部件进行了结构设计,并对液压系统等控制部分进行了详细的设计。该剑麻收获机实现了剑麻收获的机械化,在不影响剑麻再生产能的前提下,大幅节省了人力,尤其适用于大规模种植区使用。但是,由于该机器需要人工对剑麻位置进行定位,因此接下来可以在对剑麻精确定位方面进行优化设计。
[1] 高洪.剑麻的性能及应用[J].山东纺织科技, 2010(3): 13-15.
[2] 三农论坛.我国麻类生产的现状与发展建议[J].农村实用技术,2013,35(4):7-8.
[3] 潘煜荣.剑麻叶片收割机械的一个设想[Z].海口: 华南热机化所, 1998.
[4] B.A.Majaja, W.J.Chancellor. THE POTENTIAL FOR MECHANICAL HARVEST OF SISAL[J].American Society of Agricultural Engineers, 1997, 13(6): 703-708.
[5] 张文强,庄兆明.中国剑麻加工机械的现状与展望[J].热带农业工程,2012,36(3):57-60.
[6] 艾云航.海南西部地区剑麻产业开发前景广阔[J].中国农业信息, 2002(10): 15-16.
[7] 樊军庆, 梁栋, 王高平.剑麻收获机:中国, CN 201110162071[P]. 2012-12-5.
[8] 许贤良,王传礼.液压传动[M].北京:国防工业出版社, 2006:15-32.
[9] 张绍九.液压同步系统[M].北京:化学工业出版社,2010:53-80.
[10] 成大先.机械设计手册(5版)[K].北京:化学工业出版社,2002:102-103.Abstract ID:1003-188X(2017)05-0155-EA
Design of Platform-type Sisal Harvesting Machine
Cai Yi, Zhang Baozhen, Fan Junqing, Zhang Zhiqiang, Liu Lei
(Mechanic and Electronic Engineering,Hainan University,Haikou 570228,China)
This design started from the characteristics of sisal and sisal planting scale, combined with the design concept of the agricultural machinery, realized the mechanization of sisal harvest. This machine is mainly composed of key parts such as working platform,leaf separating mechanism,leaf cutting mechanism and hydraulic control system, and so on .determined the main structure and working principle of orbit of the machine work platform,leaf claw, leaf cutting tools, designed the specific parameters of hydraulic system. The design of machine solved the problem of sisal harvest time consuming.To fill the gaps in the domestic mechanical harvesting of sisal,it is great significance to promoting the development of sisal industry.
sisal harvest; working platform; leaf claw; leaf cutting tool; hydraulic system
2016-04-22
海南省自然科学基金项目(20155205)
蔡 毅(1991-),男,湖南沅江人,硕士研究生,(E-mail)13876544229@163.com。
张宝珍(1969-),女,河北唐山人,副教授,硕士生导师,(E-mail)baozhen-zh@163.com。
S225.91+3
A
1003-188X(2017)05-0155-04
猜你喜欢
中国矫形外科杂志(2022年2期)2022-02-10 09:59:32
装备制造技术(2021年5期)2021-08-14 01:44:22
纺织科技进展(2021年5期)2021-07-22 08:41:42
装备制造技术(2021年1期)2021-05-21 07:54:44
山西卫生健康职业学院学报(2020年4期)2020-10-12 00:06:54
星星·散文诗(2017年22期)2017-12-30 05:43:59
新农业(2016年13期)2016-08-16 12:12:42
浙江大学学报(工学版)(2016年9期)2016-06-05 09:20:52
时代农机(2015年3期)2015-11-14 01:15:21
中国塑料(2015年5期)2015-10-14 00:59:54
