
弹齿滚筒式捡拾装置的参数化设计与仿真
2017-12-16 09:15王洪明肖子学刑冀辉敖恩查
农机化研究 2017年5期
王 芳,王洪明,肖子学,刑冀辉,敖恩查
(内蒙古农业大学 机电工程学院,呼和浩特 010018)
弹齿滚筒式捡拾装置的参数化设计与仿真
王 芳,王洪明,肖子学,刑冀辉,敖恩查
(内蒙古农业大学 机电工程学院,呼和浩特 010018)
随着我国畜牧业的飞速发展,人们对牧草收获机械提出了更高的要求,特别是在内蒙古地区,牧草收获的数量多少、品质优劣直接决定了广大农民的经济收入,因此对牧草收获机械的研究变得尤为重要。为此,以9YG-1.8型圆捆机的弹齿滚筒式捡拾装置为例,研究了盘形凸轮的基圆半径、滚筒转速和曲柄长度3个参数对弹齿速度变化的影响,进而分析其对捡拾效果的影响。本研究运用SolidWorks进行三维建模,使用VB6.0软件进行编程,实现盘形凸轮的参数化设计;使用SolidWorks自带插件COSMOSMotion对弹齿滚筒式捡拾装置进行运动学仿真,对其中主要参数进行分析,最终得出单一参数变化对捡拾效果的影响。在SolidWorks下运用VB进行二次开发可为其它机械运动分析提供了一种新的研究思路方法。
捡拾装置;弹齿滚筒;参数化设计;运动学仿真;参数分析
0 引言
畜牧业对农村经济发展极其重要,牧草作为畜牧业发展最重要的物质基础,必须得到重视且大力发展对其的研究工作[1]。牧草收获机械化技术是牧草生产中重要的环节,弹齿滚筒式捡拾装置属于牧草收获机械打捆机中的重要装置,是牧草收获机械的主要工作部件。国内外的压捆机捡拾装置形式大多为弹齿滚筒式,已有多家公司生产了不同型号的捡拾装置,以满足不同的捡拾要求[2]。但是,归根结底,其工作原理是没有改变的,至今没有技术上的革新来替代此类弹齿滚筒式捡拾装置[3-5]。捡拾器的转速、弹齿的前端弯曲方向和弯曲程度及盘形凸轮机构的参数对捡拾牧草的效率影响重大。本课题是在学者们对弹齿滚筒式捡拾装置的研究的基础上,对之前的研究方法做进一步补充,更深入地对其做出说明,使今后对此类机构的研究变得更加便捷、迅速。与此同时,加入SolidWorks软件的二次开发,实现对盘形凸轮的参数化设计,也为今后对弹齿滚筒式捡拾装置的研究提供方法支持,具有重要的现实意义[6-8]。
1 弹齿滚筒式捡拾装置的理论分析
1.1 弹齿滚筒式捡拾装置的工作原理
滚筒弹齿式捡拾装置如图1所示。该捡拾装置的主要工作元件为弹齿,需在护板里安装带动曲柄运动的驱动件,最终驱动弹齿运动,定向滚轮机构被凸轮轨道控制着,并按其规定的轨道运动[9]。当捡拾器开始运转时,弹齿在定向滚轮机构导轨的控制下按其规定的轨迹运动,完成在运动中合理有效地捡拾牧草的动作。当弹齿运动到捡拾装置滚筒的下方时,弹齿端部从护板内的缝隙间伸出,将地面上散落的牧草捡拾起来;随着弹齿按轨迹的运动将牧草逐渐提升到捡拾器的上方,并将其推向喂入机构的正下方;与此同时,弹齿继续垂直向下方运动,稳步回缩到护板内侧,从而与被捡拾的牧草脱离。

1.弹齿 2.弹齿杆 3.曲柄 4.凸轮盘 5.滚轮 6.滚筒盘 7.中间轴 8.滚筒护板 9.侧护板 10.悬挂轴 11.支架
1.2 弹齿滚筒式捡拾装置的运动分析
1.2.1 弹齿滚筒式捡拾装置的数学模型
由于捡拾装置的运动是由3个单一运动共同合成的运动,需要同时考虑到机器本身向前的运动、弹齿相对于机体的转动和弹齿相对于盘形凸轮的摆动[10-11]。如图2所示,弹齿端部G点的位移、速度和加速度方程为:
G点的位移方程为
(1)
G点的速度方程为
(2)
G点的加速度方程为
(3)
其中,x、y分别为弹齿端部水平和垂直向位移;vx、vy分别为弹齿端部水平和垂直分速度;ax、ay分别为弹齿端部水平和垂直加速度;l为曲柄长度;l'为弹齿长度;φ0为 凸轮初始摆角;φ为凸轮摆角;t为时间;γ为弹齿与曲柄夹角。

图2 弹齿运动分析图
得出位移方程后,将其作为在SolidWorks软件中三维建模的依据,利用“按方程轨迹”这一选项进行建模,得出了速度和加速度方程,可以在三维建模完成后的计算机仿真阶段依靠计算机来计算,得出速度和加速度曲线[12]。
1.2.2 影响捡拾装置捡拾效果的主要因素
1) 弹齿末端离地最小间隙。要分析影响捡拾装置捡拾效果的主要因素,首先要知道弹齿的运动轨迹。
如图3所示,在弹齿随机器运动的一个周期内,有一个空间是不能够被弹齿捡拾的,即a点、b点、c点所围成的空间。调整此空间的面积,也就成了提高捡拾效果的重要手段[13]。图4为9YG-1.8型弹齿滚筒式捡拾装置弹齿的三维模型,弹齿的长度为180 mm,经过查阅和分析了大量文献,此次研究弹齿端部离地面最小间隙选择为30mm。

图3 弹齿的运动轨迹

图4 弹齿三维模型
2) 机器前进的速度。在圆捆机工作时,必须是机器前进的速度低于弹齿所做圆周运动的线速度,才能够达到捡拾效果。由内蒙古农业大学的乌吉斯古楞在2010年对其研究的报告中指出:机器前进的速度在1.2~1.6m/s之间,其大小的变化对捡拾效果的影响不大,只需满足其速度比弹齿圆周速度小即可。本次研究对机器前进的速度取值为1.4m/s。
3)捡拾装置的转速。修正系数K取值为1.5,所以捡拾装置实际的转速应为111r/min[14]。
4)弹齿滚筒式捡拾装置结构参数。捡拾装置的结构参数到底对捡拾效果有何影响,还需要利用计算机仿真得出结论。这也就是本文所要研究的一部分内容,即单一参数对弹齿滚筒式捡拾装置捡拾效果的影响,本文要研究的结构参数为盘形凸轮的基圆半径和曲柄长度。
2 对弹齿滚筒式捡拾装置的三维建模
本次研究采用SolidWorks软件进行三维建模,如图5所示。弹齿滚筒式捡拾装置尺寸是由国家草原畜牧业装备工程技术研究中心提供的,型号为9YG-1.8型。其中,滚筒半径为160mm、曲柄长度为80mm、弹齿长度为180mm、弹齿与曲柄夹角为1.1rad、滚子半径为17.5mm。

图5 弹齿滚筒式捡拾装置装配体
首先根据捡拾器的实际工作要求,确定所设计盘形凸轮机构的运动规律。在捡拾阶段,采用等角速度运动规律,当盘形凸轮转过120°时,滚子按其轨迹上升50mm;等盘形凸轮继续转过60°时,滚子保持该距离不变动;当盘形凸轮再转动60°时,滚子下降回初始时的位置,即下降50mm,此过程采用的运动规律为余弦加速度运动规律;剩下的过程中,滚子保持初始位置不动。首先用SolidWorks绘制零件图,使用“方程驱动的曲线”这一方式进行建模[15],如图6所示。在绘制盘形凸轮的同时,使用“宏录制”这一功能,如图7所示。将所得到的程序在VB6.0编程软件中设计出的人机交互界面(见图8)输入参数,进行修改,SolidWorks软件自启并完成建模(见图9),从而实现对盘形凸轮的参数化设计[16]。

图6 使用“方程驱动的曲线”模式绘制的盘形凸轮模型

图7 宏文件

图9 改变基圆半径后的盘形凸轮模型
3 弹齿滚筒式捡拾装置仿真分析
用COSMOSMotion 对弹齿滚筒式捡拾装置进行仿真,得到弹齿滚筒捡拾器的弹齿尖在旋转过程中的各种曲线[17],9YG-1.8型捡拾器在机器前进速度V=1.4m/s、滚筒转速n=74r/min、曲柄长度为80mm的情况下,对其弹齿的速度进行分析。其中,盘形凸轮的参数为:基圆半径r=120mm ,升程角为31.5°,回程角为23°,分析结果如图10所示。该型号弹齿运动周期为2.78s,包括推程阶段、远休止阶段和回程阶段。
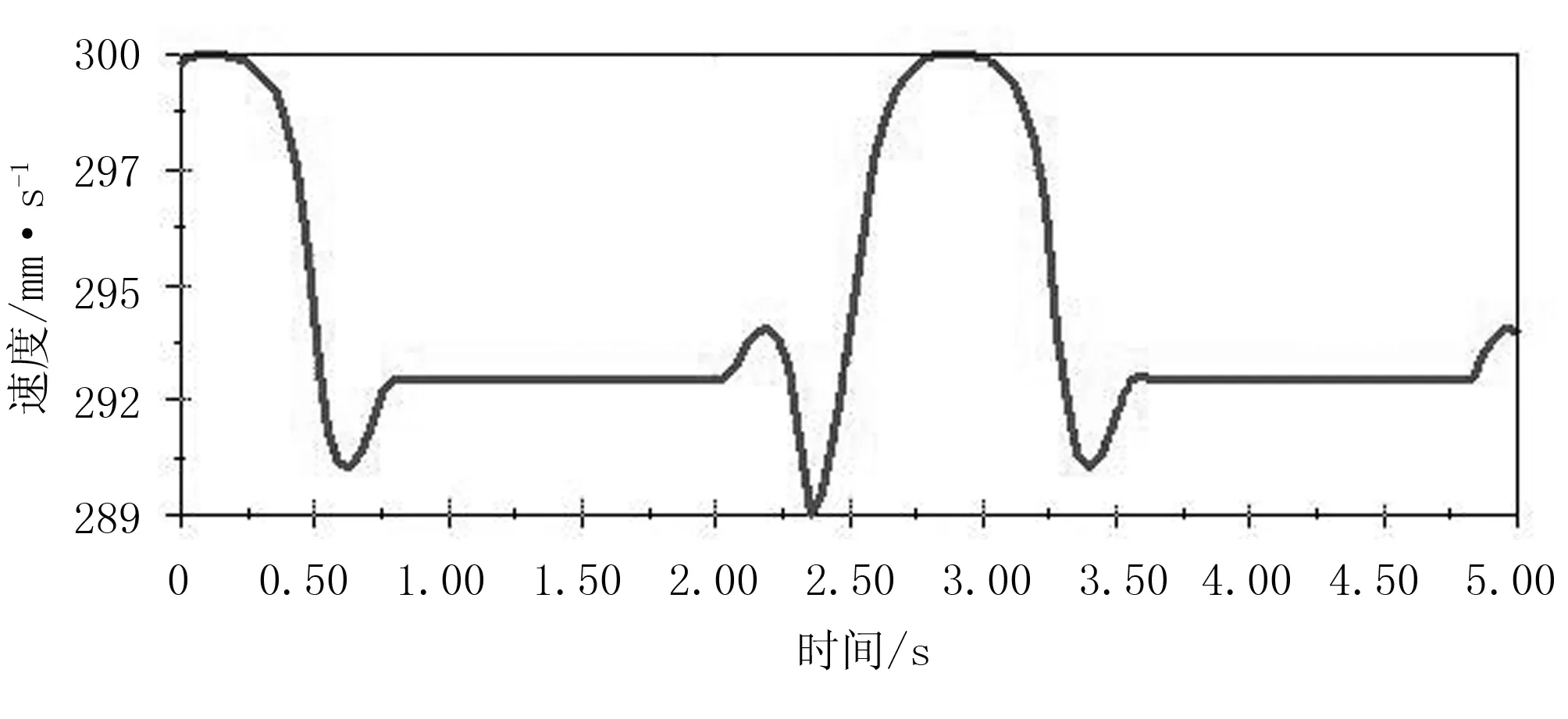
图10 9YG-1.8型捡拾器弹齿速度分析图
推程阶段为0~0.79s。在0~0.62s的过程中,弹齿速度从300mm/s下降到290mm/s;在0.62~0.79s的过程中,速度上升到292mm/s时。远休止阶段为0.79~2.05s,弹齿速度保持在292mm/s时,速度没有明显变化,可以平稳地进行捡拾工作。回程阶段为2.05~2.78s。在2.05~2.19s之中速度会略有上升,在2.19~2.37s之中速度下降到289mm/s的最低值,2.37~2.78s之中速度迅速上升到300mm/s。
3.1 单一因素对弹齿速度的影响
3.1.1 基圆半径对弹齿速度的影响
在其他因素不变的情况下,只改变盘形凸轮基圆半径,分析弹齿的速度变化情况,速度变化曲线如图11、图12所示。

图11 基圆半径为110mm时弹齿速度变化曲线

图12 基圆半径为130mm时弹齿速度变化曲线
由以上速度分析图和图10进行比对,可以看出:周期没有变化,最大速度和最小速度变化也不大;随着盘形凸轮基圆半径尺寸的增加,在升程阶段速度变化的程度越大,在图形中可以看出其形状越来越“尖锐”,盘形凸轮受到的冲击也就越大,此位置易造成凸轮的磨损。在远休止阶段速度几乎没有变化,有利于捡拾装置平稳地完成捡拾作业。在回程阶段因为需要将牧草送进喂入装置中,并且完成收齿动作,需要速度的突变来完成这项动作。因此,图中在该阶段显得比较“震荡”,随着基圆半径的增加,“震荡”的幅度越来越小。
图13~图15分别是基圆半径为110、120、130mm所对应的角速度变化曲线。

图13 基圆半径为110mm时弹齿角速度变化曲线

图14 基圆半径为120mm时弹齿角速度变化曲线

图15 基圆半径为130mm时弹齿角速度变化曲线
由以上角速度分析图可以看出:弹齿的角速度最大值和最小值都没有太大的变化。在升程阶段,角速度大小随时间从最小值慢慢变大,之后有所下降,基圆半径越大,角速度改变程度越大,在此阶段角速度达到的最大值越大。在远休止阶段,基圆半径几乎没有对角速度产生影响,角速度恒定在一个值上不变,捡拾装置在此阶段对牧草的捡拾可以平稳地进行。在回程阶段,角速度经历了一个变小之后变大再变回到最小值的过程,当基圆半径增大到130mm时,其变化的程度比原来有所减小。
3.1.2 滚筒转速对弹齿速度的影响
图16、图17分别是滚筒转速为64r/min和84r/min时弹齿的速度曲线图。

图16 滚筒转速为64r/min时弹齿速度变化曲线

图17 滚筒转速为84r/min时弹齿速度变化曲线
由图16、图17和图10可以得知:随着滚筒转速的增加,所对应周期逐渐减小,从3.23s减小到2.44s,升程、远休止和回程3个阶段各自所用的时间也相应减小;其速度变化的趋势基本一致,即图形看起来大致相同,不同的是不同转速对升程阶段、远休止阶段和回程阶段弹齿的速度大小是有影响的,且随着滚筒转速的增大,各个阶段弹齿速度随之逐渐增大。其中,升程阶段最大速度由260mm/s提升到了341mm/s,最小速度由251mm/s增长到330mm/s;远休止阶段的速度由253mm/s提升到了332mm/s;回程阶段最大速度由260mm/s提升到了341mm/s,最小速度由250mm/s增长到328mm/s。
由以上分析可以得出:改变滚筒转速的大小可以改变弹齿运动的周期,滚筒速度越大,周期越小,同时可以改变弹齿线速度的最大值和最小值,滚筒速度越大,弹齿线速度越大。但是,改变滚筒转速不能改变弹齿在运动过程中的速度变化趋势。
分析得知,该图的最大应力为916 MPa,发生连接块与连接螺栓的连接处,单元305 461即表示此时最大应力的地方。统计分析发现所有连接块与连接螺栓处的受力都在880 MPa左右,考虑到它们的应力状况,螺栓被拉断对连接块造成的影响是比较严重的,需要进行适当加强或改善设计。另一侧的支座受力和变形情况与此极为相似,只是有略微的不同,故不再赘述。
3.1.3 曲柄长度对弹齿速度的影响
图18、图19分别是曲柄长度为75mm和85mm时弹齿的速度曲线图。
由图18、图19和图10得知:随着曲柄长度的增加,所对应周期逐渐减小,从3.04s减小到2.63s,升程、远休止和回程3个阶段各自所用的时间也相应减小。其速度变化的趋势基本一致,即图形看起来大致相同,只是在升程阶段经过升程角的时候速度曲线的图形变得越来越“尖锐”,回程阶段经过回程角的时间速度曲线波动越来越小。曲柄长度对升程阶段、远休止阶段和回程阶段弹齿的速度大小是有影响的,并且随着曲柄长度的增大,各个阶段弹齿速度随之逐渐增大。由以上分析可以得出:改变曲柄长度的大小可以改变弹齿运动的周期,曲柄越大,周期越小,同时可以改变弹齿线速度的最大值和最小值,曲柄长度越大,弹齿线速度越大,但曲柄长度必须满足使机构运动的条件。改变曲柄长度可以一定程度上改变弹齿在升程阶段和回程阶段的速度变化趋势。

图18 曲柄长度为75mm时弹齿速度变化曲线

图19 曲柄长度为85mm时弹齿速度变化曲线
4 结论与建议
4.1 结论
1)利用VB6.0和SolidWorks对捡拾装置的盘形凸轮进行参数化设计,加快了研究的速度,提高了工作效率,对今后此类机构的研究提供了理论依据和方法支持。
2)改变基圆半径对弹齿运动周期没有影响,对弹齿运动过程中速度的最大值和最小值的变化有影响,对弹齿在运动到升程阶段和回程阶段的速度变化快慢有一定的影响。
4)在满足捡拾装置可以正常工作的情况下,改变曲柄长度可以改变弹齿运动的周期,曲柄长度越大,周期越小,同时可以改变弹齿线速度的最大值和最小值,曲柄长度越大,弹齿线速度越大。改变曲柄长度可以一定程度上改变弹齿在升程阶段和回程阶段的速度变化快慢。
4.2 建议
本研究只停留在计算机仿真阶段,对于实际工作情况中各个参数对弹齿滚筒式捡拾装置捡拾效果的影响,还需要进一步通过试验来确定。
[1] 博亚.我国畜牧业现状及发展趋势[J].农业技术与装备,2011(11):11-12.
[2] 杨炳南,唐金秋,汪雄伟.浅析国内外畜牧机械的发展[J].农业机械,2004(1):34-36.
[3] 房骏,尚力,王庆莹.我国牧草收获机械的发展现状及存在问题[J].农机质量与监督,2006(1):56.
[4] 袁天佐,陈清,李志国.国外两种牧草机械简介[J].农业机械,2004(4):65.
[5] 马国玉,袁洪方,刘鹏军,等.现阶段我国牧草机械的需求分析[J].农机化研究,2011,33(2):222-225.
[6] 张蕊,管琪明,贺福强.基于SolidWorks的盘形凸轮参数化建模[J].现代机械,2012(3):4-5.
[7] 王文明,王春光.弹齿滚筒式捡拾装置的研究与发展[J].农机化研究,2012,34(1):221-225.
[8] 高常青,曹树坤,王潍,等.基于SolidWorks的盘形凸轮设计与运动仿真[J].现代制造技术与装备,2008(5):60-62.
[9] 王文明.弹齿滚筒式捡拾装置参数分析和改进设计研究[D].呼和浩特:内蒙古农业大学,2012:1-10.
[10] 盛凯,曾南宏.弹齿滚筒捡拾器的机构特性及其运动数学模型[J].农业机械学报,1991(1):51-57.
[11] 王振华,王德成,刘贵林,等.方草捆压捆机捡拾器参数设计[J].农业机械学报,2010,41(S1):107-109.
[12] 谢良胜,寸立岗,柳彦虎.基于SolidWorks的盘形凸轮CAD/CAE/CAM一体化设计[J].制造业信息化,2013(5):70-72.
[13] 王国权,余群,卜云龙,等.秸秆捡拾打捆机设计及捡拾器的动力学仿真[J].农业机械学报,2001(5):59-63.
[14] 乌吉斯古楞.弹齿滚筒式牧草捡拾器运动仿真及性能参数的试验研究[D].呼和浩特:内蒙古农业大学,2010:2-3.
[15] 罗阳,田怀文.基于SolidWorks平台的盘形凸轮参数化设计[J].计算机应用技术[J],2010,37(1):49-51.
[16] 吕晓燕,贾海英,张晓钟.基于VB对SolidWorks二次开发方法的研究[J].机械设计与制造,2005(3):114-116.
[17] 孙贵斌,孙召瑞,吴修彬,等.基于COSMOSMotion的弹齿滚筒捡拾器运动仿真[J].农业装备与车辆工程,2010(8):37-39.
Parametric Design and Kinematics Simulation on Spring-Finger Cylinder Pickup Collector
Wang Fang, Wang Hongming , Xiao Zixue, Xing Jihui, Ao Encha
(College of Mechanical Engineering, Inner Mongolia Agricultural University, Huhhot 010018,China)
With the rapid development of Chinese animal husbandry, People also put forward higher requirements for forage harvesting machinery. Especially in the Inner Mongolia region, the number and the quality of harvest grass directly determine the income of people. Therefore, the study of forage harvesting machine is particularly important.This article researches on the spring-finger cylinder pickup collector of 9YG-1.8 type round binder, including the disc CAM base circle radius, roller speed and length of crank, a total of three parameters is studied in this paper for the influence of the changes in the rate of the spring-finger, and analyze its influence on collecting effect. The research apply SolidWorks to make 3D modeling, using VB6.0 program to achieve parameterized design of disc CAM. Using SolidWorks ’s plug-in COSMOS Motion making kinematics simulation.With the computer simulation method to study the effect of single parameters on the effect of collecting, eventually come to the conclusion. The use of VB to the second development in SolidWorks provides a new method for the analysis of other mechanical movement.
pickup collector; spring-finger cylinder; parametric design; kinematics simulation; parameter analysis
2016-05-31
国家自然科学基金项目(31160248);内蒙古自然科学基金项目(2014MS0538)
王 芳(1972-),女,内蒙古乌兰察布人,副教授,博士,硕士生导师,( E-mail)nndwangfang@163.com。
S817.1
A
1003-188X(2017)05-0057-06
猜你喜欢
幼儿教育(2022年10期)2022-10-28
科学技术创新(2022年24期)2022-08-06
设备管理与维修(2021年17期)2021-11-02
幼儿教育·父母孩子版(2021年6期)2021-08-05
制造技术与机床(2019年8期)2019-09-03
船海工程(2018年1期)2018-03-01
制造技术与机床(2017年5期)2018-01-19
新商务周刊(2017年5期)2017-10-16
中南大学学报(自然科学版)(2016年2期)2017-01-19
中国自行车·骑行风尚(2014年2期)2014-05-07
