
我国施肥机械化技术现状及问题分析
2017-12-15 06:47:02付宇超袁文胜张文毅
农机化研究 2017年1期
付宇超,袁文胜,张文毅,纪 要
(农业部 南京农业机械化研究所,南京 210014)
我国施肥机械化技术现状及问题分析
付宇超,袁文胜,张文毅,纪 要
(农业部 南京农业机械化研究所,南京 210014)
化肥是重要的农业生产资料,其施用是农作物增产重要的条件,随着劳动力的日益短缺,机械化施肥方式在未来农作物种植环节中必不可少。因此,了解我国施肥机械化技术发展现状,预测未来的发展方向,对于施肥技术及装备研究人员有重要意义。为此,论述了中外施肥机械化的发展与现状,对国内相关技术及装备研究成果进行了分析,并进一步分析了国内不同施肥方式存在的各种问题,指出了我国在施肥机械化的发展中遇到的困难和瓶颈,且有针对性地提出了建议。
施肥机械化;施肥技术;研究现状;发展方向
0 引言
化肥可为植物生长提供必要的营养,施肥是农作物增产的主要方法之一,其三大支柱是化肥配制、施肥技术和施肥机械。在施肥的三大支柱中,由于政府的大力扶持,化肥配制已经在国际上达到了比较先进的水平。虽然我国的化肥配置水平较高,但我国施肥技术和施肥机械的研究则较发达国家落后许多[1],不仅导致了化肥利用率低,而且随着时间的推移,将会导致土壤肥力下降、水源污染及产出作物的品质下降等种种问题。通常情况下,农户使用化肥采用撒播方式居多,大量撒播会造成肥料的浪费,作物没有吸收的、多余的肥料渗入地下水会污染水源进而影响到人们的身体健康,也容易造成土壤板结。从施肥时间来看,肥料可以分为基肥、种肥及中耕追肥等。其中,基肥是指施肥时农作物还未种植的肥料,作物生长过程中大部分养分由基肥提供。播种时施用的肥料叫做种肥,种子发芽和早期生长发育所需的营养基本由种肥提供。种肥的施肥方式可以根据肥料和种子的相对位置来分,常见的有侧位深施肥、正位深施肥和种肥混施等[2]。从施肥机械角度来看,根据肥料的种类和特性不同,施肥机可分为固态化肥施肥机、固态厩肥施肥机、液态化肥施肥机和液体厩肥施肥机;按施肥方式不同可分为撒布机械、施种肥机械、施追肥机械和施肥播种机械等[3]。
1 国外施肥机械研究现状
由于人工施肥作业的劳动量比较大及施肥环境比较恶劣等种种因素,在20世纪早期欧美等发达国家就已经在施肥机械方面进行了研究,时至今日欧美等发达国家既有播种机械带有的施肥装置,还有大量用于整地前撒播、中耕施肥及改良土壤等专用的施肥机械。畜拉式堆肥撒布机在国外实现农业机械化的早期就已经研制出来[4]。20世纪30年代左右,国外在施肥机械的研究和制造领域已经有了可观的规模, 70年代时欧美等发达国家基本实现了施肥的全程机械化作业,在化肥的储存、装卸、运输及田间撒施作业等机具的研发和储备方面已经形成较大规模[5]。
液体化肥的概念由美国率先提出,在20世纪30年代时美国率先使用,到目前为止加拿大、丹麦等国家已经在广泛应用。由于液氨在液态化肥中极易挥发,所以施用液态化肥时一般采取深沟施肥和注入施肥等方法,而不能用常见的撒施等方法。美国生产的700型液氨施肥机原理是用开深沟的方法把液氨施入土地,但开深沟时极易切断作物的根系从而导致作物产量降低。目前,施用液态化肥比较好的方法是注入法,前苏联研制了一种MBY-3型施肥机,该机采用旋转式针状注肥器作为工作部件。美国研制了一种液氨注施装置,将液氨冷处理后形成85%的液体和15%的蒸汽,然后撒到较浅的土层中,后面的耕作机具立即覆土,效果比较理想[6]。美国AGCO公司的麦赛福格森SC7660型液体施肥机(见图1),该机既可撒施液态有机肥,也可以喷洒农药,覆盖性比较好,前/后轮距由液压无极调节,可以灵活适应不同行距的要求[7]。

图1 SC7660型液体施肥机
世界各国都很注意有机肥料的生产和使用,因为有机肥既能够给作物生长提供充足的养分,又能够对土壤微生物的营养结构进行调节、对土壤物理化学性能进行改善且可以有效地提高土壤肥力,而且有机肥比化肥更便宜。有机肥的制备一般是通过把家禽、家畜等排泄产生的粪、尿等混合物用固液分离机将液体与固体分离,然后在分离出来的固状物中掺入土和粉碎过的植物秸秆进行发酵,发酵完成晾干后撒入土地或者进一步加工把发酵晾干的有机肥制成颗粒状肥料再用施肥机撒施。日本巴依克米株式会社研制了一种小型制肥机,可以把收割后的秸秆、树枝及杂草等切碎,然后在切碎的碎屑中加入稻壳,再进一步破碎和高压混合,这种方法可以制成无臭味的有机肥。法国KUHN公司研制了一种ProPush2044尾部背推式撒肥机,该撒肥机的抛撒器有立式(见图2)和卧式两种不同形式,两种抛撒形式各有优点:立式抛撒器的抛撒幅度比较宽;而卧式抛撒器的抛撒宽度则相对集中,且卧式抛撒器的功耗较小,卸料速度也比较小[8]。

图2 立式撒肥机
法国KUHN公司生产了一种ProTwin8150侧式撒肥机(见图3),是大型的侧式抛肥机械。该机采用了双搅龙输送的方式,抛肥器采用锤片式,当有机肥等肥料运动到卸料口时,锤片将会把有机肥撕裂、粉碎,从下往上将物料有规律地抛撒出去。该机的适用范围比较广,可以抛撒沟肥、堆肥、泥浆、厩肥、垫床物料及沙粪肥等,有非常好的抛撒效果[9]。

图3 ProTwin8150侧式撒肥机
目前,国外的施肥机械已经比较发达,欧美等发达国家由于工业起步早,对施肥机械的研究比较深入,已形成了一套完整的施肥机械体系,非常值得学习和借鉴。
2 国内施肥机械研究现状
早在20世纪80年代,上海就对施肥机械开始进行研究,并在计算机指导下取得了较好的成效。在20世纪90年代后期,我国开始关注精准农业并且进行了技术和科技的引进。近年来,我国对精准农业越来越重视和支持,在引进、消化、吸收国外先进的技术和科技的同时,也在不断探索适合中国的精准农业的技术体系,在科研人员的不断努力下,精准农业的概念已经被社会和科技界所接受,并且已经开始了实践应用。目前,我国在变量施肥方面的应用主要是使用GPS定位土壤取样化验;利用地理信息系统(GIS)产生氮、磷、钾、pH值、有机质层图,并利用农业专家系统和地理信息系统产生变量施肥处方图,控制变量施肥播种机进行变量施肥播种。例如,黑龙江垦区大西江农场的约翰迪尔变量施肥播种机就是利用GPS导航自动控制进行直线作业[10]。
马旭等人的研究使播种机可以和便捷、稳定的手控与自控变量施肥机配套起来[11]。王秀等人研制了一种可以配套国产拖拉机的变量施肥机,而且还可以使用GPS得出处方图从而进行变量施肥,并优化设计了齿槽转速[12]。陈广大等人设计了自动调节排肥量的控制系统,该系统的核心是ARM,通过PID自动调节排肥量,可以达到排肥均匀、稳定、精度高的效果[13]。于英杰等人设计的一种自动识别算法可以针对不同农田进行网格划分并精确确定位置。其中,传感器信号的采集使用APM控制器,其优点是稳定、精度高、能对农田形状的变化有较好的适应性[14]。
北京市农林科学院农业信息化工程技术研究中心研制了一种变量施肥机,可以实时接收GPS信号和作业时行走信号,经过处理后与用户设计的施肥量和计算机处方施肥量比对后自动调节排肥系统的转速,从而实现实时的变量施肥,且设有手动和自动变量施肥两个模式。目前,该机已经在北京、上海及新疆生产建设兵团等地推广应用。
复式作业机方面,夏俊芳等人研究设计了一种2BFS-8型水稻芽种播种施肥机,能够实现耕作、播种、施肥3种不同作业一次下地完成,并且生产率、断芽率等性能指标均能达到国家标准[15]。王晓东等人设计了自走式的2BF-1型播种施肥机[16],王玉华等人设计了可调式免耕播种施肥机[17],这两种机型具有调节方便可靠、机具简单轻便等优点,且对丘陵山地等非平原地形有较好的适应性,提高了在上述复杂地形上作业时的作业质量和效率。苑严伟等人在种肥机上加装了变量施肥模块,在施种肥时把处方图和定位信息通过自动控制系统结合起来,在精密施肥时可以做到变量施肥[18]。
上海交通大学机械与动力工程学院成功研制了我国第一台智能变量施肥、播种、旋耕复合机,能够适应我国南方地区农艺特点。根据我国的国情,该智能复合机创造性地提出了经验处方、智能处方及数字设定变量施肥三大模型,从根本上突破了国际上变量施肥机完全依赖处方的现状,能够实现“人工自适应变量处方、智能变量处方和施肥量数字设定”3种模式下的变量施肥作业[19]。
张传斌等人研制了TX-12型烟草定量穴灌追肥机,优点是可定量追肥、灌溉,该机型比较适用于干旱的地区,突出的特点是工作效率较高及田间移动灵活[20]。王金星等人研制了一种智能烟草定量穴施追肥机,可以通过高准确率的传感器将检测信号传给单片机进而达到自动控制,且对烟草的损伤较低[21]。崔欢虎等人研制了一种中耕保墒追肥机,可以降低干旱地区农作物在苗期的中耕和追肥等作业的成本,提高中耕、追肥的效率,经过试验产生了较好的效果[22]。
吉林大学生物与农业工程学院研制了2SF-2型变量深施肥机,特点是使用IC卡来作为信息储存和决策单元,且连续两年在吉林省德惠市国家农业高新技术示范区进行了试验。该机的变量施肥控制方式有手动控制和自动变制两种,试验结果比较理想,能够实现精准农业意义上的变量施肥操作[23]。
黑龙江八一农垦大学精准农业研究中心和八五二农场白桦耕作机厂进行合作,把变量施肥装置安装在气吸式大豆精密播种机上,改装后采用工业控制计算机为上位机,以单片计算机为核心的变量施肥控制驱动器为下位机,通过变量施肥控制驱动器控制电控无级变速器。该变速器控制播种机排肥传动系统的传动比,达到改变播种机施肥量的目的,并且在播种机上整合了GPS定位系统,成功研制出了基于GPS定位的大豆精密播种机。同时,对该机进行了大量的试验,得到了比较理想的试验结果。其中,GPS定位比较精确,变量施肥控制稳定,取得了较好的变量施肥试验效果[24]。
申屠留芳等人研究设计了一种电动的自走式撒肥机,有结构简单、灵活、轻巧、成本低等优点,广受温室种植户的喜爱,提高了温室作业的效率、大幅度降低了作业人员的劳动强度[25]。陈书法等人设计了以AT89C51单片(见图4)为核心的水田高地隙自走式变量撒肥机,并且有针对性进行了大量试验,使变量施肥在不同的施肥环境下达到了可控的目的[26]。
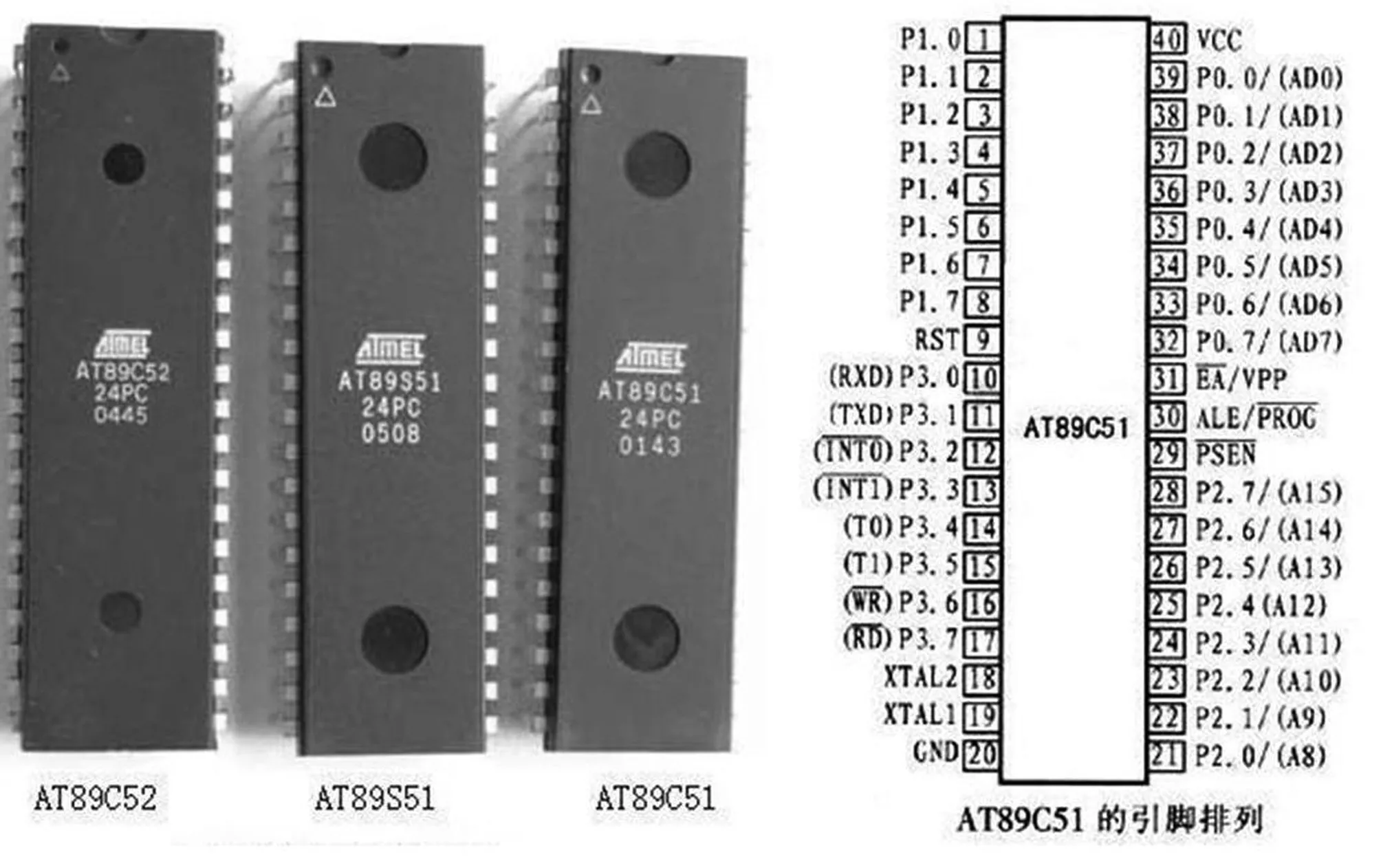
图4 AT89C51引脚序列
张李娴等人研究设计了一种摆管式撒肥机,可以防止化肥堵塞输肥管,并且使化肥撒播更加均匀,为以后的研究提供了理论依据[27]。
程亨曼等人设计的FY400型多功能液态深施肥机可以和播种机配套且可适用于多种中耕作物,节肥、增产效果比较显著[28]。王金峰等人利用高速摄像对扎穴运动曲线进行了研究,通过对高速摄像拍摄所得的图像进行软件分析与处理,得到了扎穴运动曲线,并确定了喷肥的时间误差和精确度[29]。郗晓焕等人对施肥机械中的扎穴机构进行了优化设计,使用弧形扎穴机构代替了广泛使用的曲柄摇杆机构、曲柄滑块,用VB软件进行了仿真分析,确定了最优参数,并对机构入穴与返程轨迹的一致性进行了验证[30]。
河北农业大学机电学院联合河北省农业机械化研究所对圆盘式变量施肥机进行了的深入的研究,并对圆盘式变量施肥机的发展和关键技术进行了探讨[31]。
重庆市农业科学院、福建省农科院土壤肥料研究所等多家科研机构也对变量施肥技术进行了深入的探索和研究[32]。
从以上资料可以看出:近年来,施肥技术研究多集中在变量施肥等热点技术方面;但这些研究大多只局限于关键技术或关键部件方面,针对整体施肥装备统筹考虑的较少,更缺少生产中成熟可用的机具。传统施肥方法多采用机械式排肥器,在作物侧位条施。这种机械式排肥部件排肥量与机具前进速度不是线性比例关系,所以在不同的作业速度下施肥量不同、排肥器稳定性不高。条施肥方式对于大株距穴播作物容易造成肥料利用率低的问题,不被吸收的肥料会造成土壤和环境污染。目前,针对传统肥料和传统施肥方式的研究越来越少,智能化变量施肥等新技术及装备又不够成熟,所以总体来说我国的施肥机械化技术比较落后。
3 存在的问题
近年来,我国施肥机械化发展比较迅速,从撒肥机到智能变量施肥机,从粗放的施肥方式到精细化作业,我国的施肥机械化有了长足的进步和发展,在此过程中也遇到了许多困难和瓶颈。
1)对于变量施肥机来说,变量施肥机械往往比较高端,需要加载许多专用的传感器等配件;而国内的传感器的研究水平还不高,有许多专用的传感器往往在国内没有生产,而进口国外的传感器则比较昂贵,所以导致成本较高。目前,我国的大多数农民家庭的购买能力相对比较弱,所以大多数农民无法接受该机械的成本。除此之外,变量施肥机作业幅宽比较小,而我国的地貌特征比较复杂,全国各地的土壤、水分等特征千差万别,导致变量施肥机局限性比较大。
2)对于种肥施肥机来说,许多种肥施肥机对种子和化肥的比例做不到精确的控制从而影响种子发芽。由于推广面积比较小,农民对施用种肥理解不深,导致许多农民认识不到深埋种肥的意义,所以在种肥施用是往往因为埋深不够而导致污染。施种肥机械的操作往往要求较高,需要农民了解许多机械方面的知识。种肥施肥机如果在潮湿的土壤或者水田作业时,随着土壤在开沟器上的不断粘着容易导致输肥管堵塞。
3)追肥施肥机的运动副容易产生磨损,修理比较难。 输肥管在施肥机升降的往复运动中容易产生形变,产生的缝隙可能会使肥料漏掉。
4)液态化肥具有很多固体化肥不具有的优点,但液态化肥往往价格比较昂贵,国内生产液态化肥的厂家也比较少,而且液态氨有较强的挥发性和刺激性会对使用者的身体造成一定的伤害。
5)撒肥机的研究相对来说比较早,但也存在许多问题。往往化肥撒施以后要求深埋,撒施后只能通过翻耕来掩埋,而通过翻耕掩埋的方法往往深度达不到要求,如果撒肥后因为下雨没有及时耕翻,就会造成污染。
4 结论与建议
1)将农机与农艺结合起来,进一步加强施肥机械和施肥技术的结合。国家应该进一步加强对施肥机械和施肥技术的投入比重,开发新型的农机具的同时,应考虑到我国复杂的地貌特征和人文环境,加强针对不同农艺要求的施肥机械的研制。我国的自然环境比较复杂,存在复杂的气候差异、地域差异、植物生长周期差异等,研究施肥机具时需要更多的考虑农艺的要求。应更多地将液压、气动等较为先进且实用的技术应用到施肥机具上,进一步提高施肥机具的自动化程度,使新的机具有更高的效率、更少的污染和更高的精度。施肥机具的进一步研究应该带有针对性,针对施肥过程中常见的问题进行点对点的研究突破或者优化,如肥料输送时管道的堵塞问题等。
2)广泛开展施肥技术和施肥机具应用培训,加强对科研成果的推广。我国施肥机械和施肥技术的落后有一部分原因是由于技术推广不到位,所以未来施肥机械的发展过程中应该加强科研部门与农业推广部门的合作。因此,应加深施肥技术和施肥机具研发的科研人员与广大农民的沟通交流,深入群众中去了解农民的亟需;应该定期展开对农民的技术培训,以利于加深双方的了解,增强农民技术和机械的应用水平、纠正农民错误的施肥方式和习惯、培养正确的施肥意识,以及使之学会对施肥机械的保养与维修,增加机械的使用寿命。技术交流可以使科研人员不脱离农村实际,及时了解农民在实际使用中遇到的问题,在进一步改进机具、完善技术时就做到了有的放矢。国内生产的施肥机械有一大部分来自中小型企业的生产,而中小型企业的研发与制造能力相对较弱,所以应该开展调查,选择农民使用过并普遍认为效果较好的机型进行改进研发,从而减少资源浪费。
3)政府应进一步加大施肥机具的补贴力度,淘汰落后的机具。政府应该加大对先进施肥机具与先进施肥技术学习的补贴力度,在加大对农民购买施肥机具或施肥仪器的补贴之外,还要在农民学习先进的施肥技术及先进施肥机具使用时给予必要的经费补贴。一些落后的施肥机械由于设计时种种原因往往不太适用于现在施肥作业,而农民的购买能力相对比较弱,所以这些施肥机械还在使用,使用这种施肥机械可能会造成对环境的污染等后果。所以,根据国家对环境友好型施肥机具的补贴政策,应该在予以相应的补贴的基础上强制性报废一批低效率、化肥高污染的施肥机具。落后的施肥机械被淘汰有利于推广更先进的、更高效的机械,提高施肥机械的自动化程度,推进农业现代化的进程。
[1] 陈远鹏,龙慧,刘志杰.我国施肥技术与施肥机械的研究现状及对策[J].农机化研究,2015,37(4):255-260.
[2] 袁文胜,金梅,吴崇友,等.国内种肥施肥机械化发展现状及思考[J].农机化研究,2011,33(12):1-5.
[3] 张伟宝.关于的施肥机械技术性能的探讨[J].科技创业家,2013(24):183.
[4] 施继红.农家肥撒施机工作部件的试验研究[D].长春:吉林农业大学,2002.
[5] 施卫省,訾琨.国内外农机化施肥新技术[J].南方农机,2004 (3):43-44.
[6] 王吉亮.,王序俭,曹肆林.中耕施肥机械技术研究现状及发展趋势[J].安徽农业科学2013(4):1814-1816.
[7] SC4660液体施肥机[EB/OL].[2015-08-13].http://www.agcocorp.cn/tabid/243/Default.aspx.
[8] 周斌.尾部背推式撒肥机[J].农业机械,2010(1):72.
[9] 周斌.库恩侧式抛撒机[J].农业机械,2010(12):106.
[10] 赴美国精准农业及3S技术培训团.美国精准农业考察培训报告[J].中国农垦2005(2):29-33.
[11] 马旭,马成林,桑国旗,等.变量施肥机具的设计[J].农业机械学报,2005,36(1):50-53.
[12] 王秀,赵春江,孟志军,等.精准变量施肥机的研制与试验[J].农业工程学报,2004,20(5):114-117.
[13] 陈广大,王悦刚,陈思睿,等.基于ARM的精确变量施肥控制系统的设计[J].中国农机化学报,2013,34(4):130-133.
[14] 于英杰,张书慧,齐江涛,等.变量施肥机在不规则田块的定位方法[J].农业机械学报,2011,42(2):158-161.
[15] 夏俊芳,许绮川,王志山,等.2BFS-8型水稻芽种播种施肥机设计与试验[J].农业机械学报,2010,41(10):44-47.
[16] 王晓东,王合.2BF-1型自走式播种施肥机的研究设计[J].农业机械,2013(11):107-108.
[17] 王玉华.可调式免耕播种施肥机的设计研究[J].农业科技与装备,2013(1):19-21.
[18] 苑严伟,张小超,吴才聪,等.玉米免耕播种施肥机精准作业监控系统[J].农业工程学报,2011,27(8):222-226.
[19] MI.精准变量施肥复合机获科技部成果转化批准[EB/OL].[2015-08-13].http://mi.sjtu.edu.cn/Shownews.asp?id=59.
[20] 张传斌,牛长根.TX-12型烟草定量穴灌追肥机的设计[J].农机化研究,2011,33(1):149-152.
[21] 王金星,高丽娟,刘双喜,等.智能烟草定量穴施追肥机[J].农业机械学报,2013,44(4):71-76.
[22] 崔欢虎,王娟玲,王裕智,等.作物苗期中耕保墒追肥机的研制与应用[J].农机化研究,2008(11):91-94.
[23] 张书慧,马成林,吴才聪,等.一种精确农业自动变量施肥技术及其实施[J].农业工程学报 2003(1):129-131.
[24] 王熙,汪春,庄卫东,等.大豆播种机变量施肥控制装置研究与设计[C]//中国农业工程学会学术年会, 2011.
[25] 申屠留芳,张洪宇,杨刚,等.温室大棚电动自走式撒肥机的设计[J].农机化研究,2013,35(9):145-147,155.
[26] 陈书法,张石平,孙星钊,等.水田高地隙自走式变量撒肥机设计与试验[J].农业工程学报,2012,28(11):16-21.
[27] 张李娴,吕新民.摆管式撒肥机的研究设计[J].西北农业学报,2009,18(4):372-374.
[28] 程亨曼,孙文峰,陈宝昌.多功能液态深施机的设计[J].农机化研究,2005(1):173-174.
[29] 王金峰,王金武,何剑南.深施型液态施肥装置施肥过程高速摄像分析[J].农业机械学报,2012,43(4):55-59.
[30] 郗晓焕,王金武,郎春玲,等.液态施肥机椭圆齿轮扎穴机构优化设计与仿真[J].农业机械学报,2011,42(2):80-83.
[31] 杨志杰. 圆盘式变量施肥机的发展及其关键技术介绍[J].农业机械 2007(5):67.
[32] 段洁利,李君,卢玉华.变量施肥机械研究现状与发展对策[J].农机化研究2011,33(5):245-248.Abstract ID:1003-188X(2017)01-0251-EA
Present Situation and Problem Analysis of the Technology of Fertilizer Mechanization in China
Fu Yuchao, Yuan Wensheng, Zhang Wenyi, Ji Yao
(Nanjing Research Institute for Agriculture Mechanization, Ministry of Agriculture, Nanjing 210014, China)
Fertilizer is an important agricultural production data,Fertilize is an indispensable condition for increase production of the crops. With labor shortages in the future of crop planting process, the mechanism of fertilization is essential. To understand the development status of fertilizer application in China and forecast future development direction of the Fertilizer mechanization is important to study the technology and equipment of fertilizer application.This paper discusses the development and current situation of Chinese and foreign fertilizer mechanization, and then analyze the domestic related technology and equipment research results.On the basis of this, the problems of different fertilization methods in China are analyzed,and pointed out the difficulties and bottlenecks encountered in the development of fertilization mechanization in China,and it is pointed out that some suggestions are put forward.
fertilization mechanization; fertilization; research status; direction of development
2015-12-16
江苏省自然科学基金项目(SBK201221161);公益性行业(农业)科研专项(201503130);江苏省农业科技自主创新资金项目(CX(15)1004)
付宇超(1990-),男,山东平度人,硕士研究生,(E-mail)296524683@qq.com。
袁文胜(1978-),男,山东曹县人,副研究员,硕士,(E-mail)ywensheng@sohu.com。
S233.3
A
1003-188X(2017)01-0251-05
猜你喜欢
中国化肥信息(2022年9期)2022-11-25 17:44:08
农业工程学报(2022年1期)2022-03-25 01:13:24
今日农业(2021年19期)2022-01-12 06:16:34
河南农业(2021年5期)2021-12-06 09:28:39
河南农业·综合版(2021年5期)2021-06-16 11:26:18
今日农业(2021年4期)2021-06-09 06:59:44
中国化肥信息(2018年2期)2018-08-23 09:09:16
农业知识(2018年33期)2018-01-17 09:01:04
中国农资(2016年40期)2016-12-06 01:30:09
江苏农机化(2015年6期)2015-12-07 11:58:18
