铁路集装箱平车防误吊系统的设计与实现
2017-12-14 11:37:07程付超
电脑与电信 2017年10期
程付超
(成都大学,四川 成都 610106)
铁路集装箱平车防误吊系统的设计与实现
程付超
(成都大学,四川 成都 610106)
针对铁路集装箱F-TR锁应用中误吊频发的现状,设计并实现了一种铁路集装箱平车防误吊系统,综合运用高精度倾角传感器、无线通信、三维实时动画等技术手段,实现了对集装箱姿态的三维展示,对集装箱与平车分离状态的精确判断,并对锁头未完全脱出的危险情况进行报警,为吊车操作人员和集装箱装卸作业管理人员提供操作辅助,保证集装箱装卸作业的安全进行。经测试,本文系统工作正常,能够达到设计目的。
集装箱;F-TR锁;防误吊
1 引言
随着世界经济总量的增长和国际贸易的发展,集装箱运输业快速发展,使用集装箱进行货物运输,成为铁路货运的主要类型之一。集装箱F-TR锁,也叫作鹰头锁(如图1),是我国自主研发的新型集装箱平车锁闭装置。F-TR锁利用其独特的鹰头结构,在锁头与集装箱角件孔之间产生尺寸干涉,实现对集装箱和平车的锁闭,具有锁闭牢固、落锁解锁效率高等优势,目前已装车过万辆。但由于集装箱装卸作业具有一定的特殊性,当集装箱内部装货量不均匀时,因集装箱F-TR锁头未完全脱出,导致集装箱连同平车一并吊起的事故时有发生,造成脱轨制动阀损坏、车辆脱线等严重事故。这类事故往往会造成集装箱和平车的严重损坏,不但给铁路公司带来巨大的经济损失,同时对吊装现场的作业流程造成较大影响,造成车站集装箱积压,影响多条线路的货运班列。
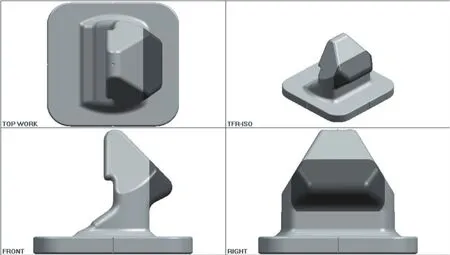
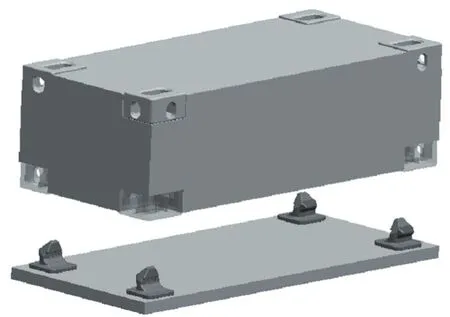
图1 F-TR锁外观及安装示意图
针对铁路集装箱货运中存在的这一问题,本文设计并实现了一种铁路集装箱平车防误吊系统(简称防误吊系统),综合运用高精度倾角传感器、无线通信、三维实时动画等技术手段,实现对集装箱姿态的三维展示,对集装箱与平车分离状态进行精确判断,并对锁头未完全脱出的危险情况进行报警,为吊车操作人员和集装箱装卸作业管理人员提供操作辅助,保证集装箱装卸作业的安全进行。
2 工作原理
2.1 F-TR锁卡锁的原因分析
F-TR锁是一种通过下落和上提力量自动解锁的锁闭装置,安装在平车的四个角落上,与集装箱角件对应,其锁闭原理是锁芯头部的偏心结构以及该锁组装后其锁头外宽大于集装箱角件孔的外宽,从而产生尺寸干涉,并将集装箱进出锁头的运动形式由垂直运动的单一形式转变为“垂直运动+水平转动”的复合形式来锁固集装箱。在集装箱水平姿态下,F-TR锁的落锁和脱锁动作都能够顺利地自动完成。然而,当集装箱内货物重量分布不均时,可能引起集装箱在吊起过程中姿态发生倾斜,如果倾斜角度过大,在一侧先完成脱锁的情况下,集装箱受锁面引导,会恢复脱锁时转动的水平角度,导致另一侧无法完成脱锁,形成锁闭,从而出现一侧脱锁,一侧卡锁的情况。
2.2 F-TR锁卡锁的不同情况
根据集装箱倾斜情况的不同,集装箱卡锁情况也可以分为三种:横向卡锁、纵向卡锁和单角卡锁。
(1)横向卡锁。发生在集装箱横向倾斜的时候,集装箱左、右单侧两个锁头同时卡住,如图2(a)所示。
(2)纵向卡锁。发生在集装箱纵向倾斜的时候,集装箱前、后单侧两个锁头同时卡住,如图2(b)所示。
(3)单角卡锁。发生在集装箱向单角倾斜的时候,集装箱某个单角锁头卡住,如图2(c)所示。
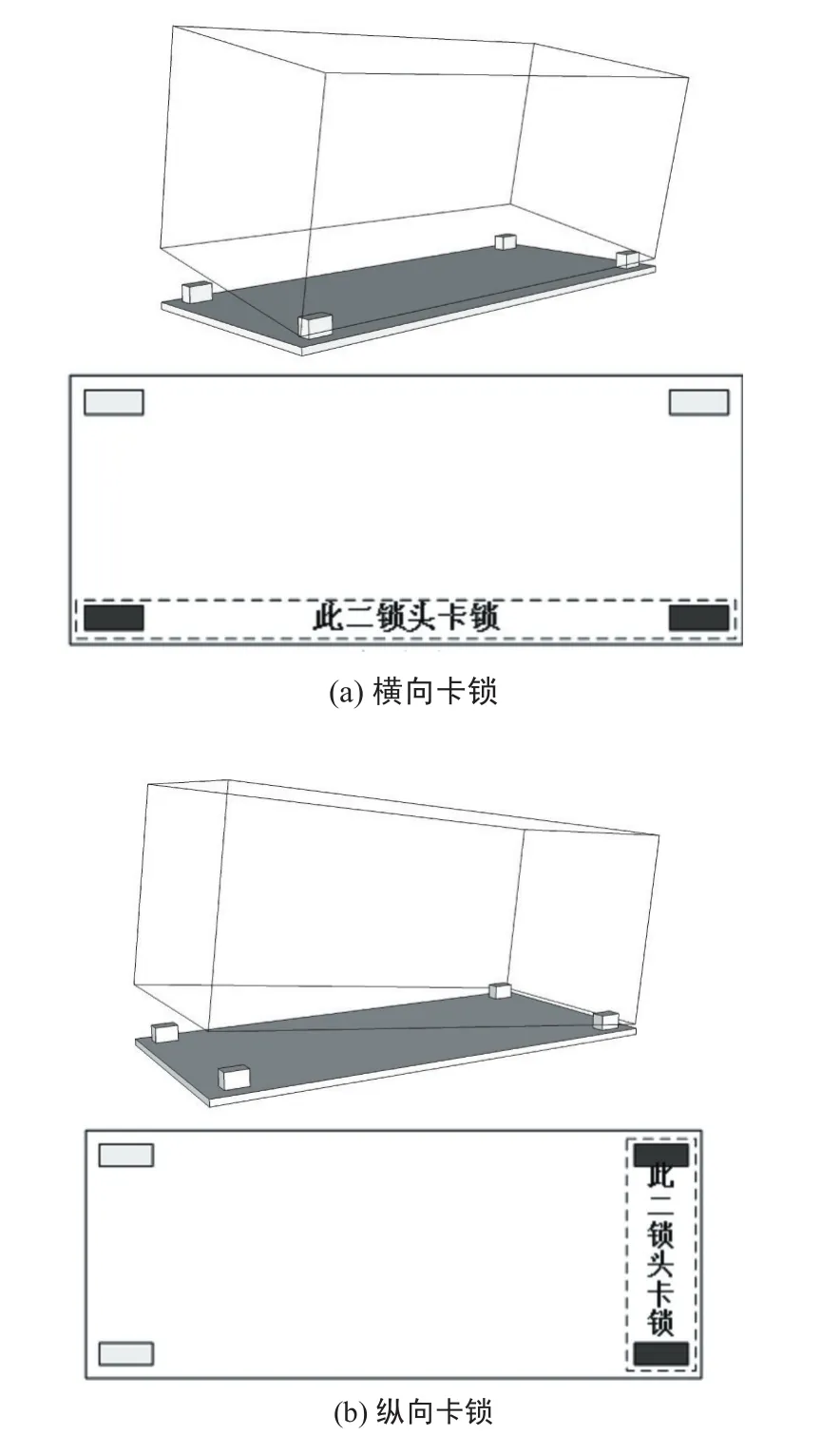
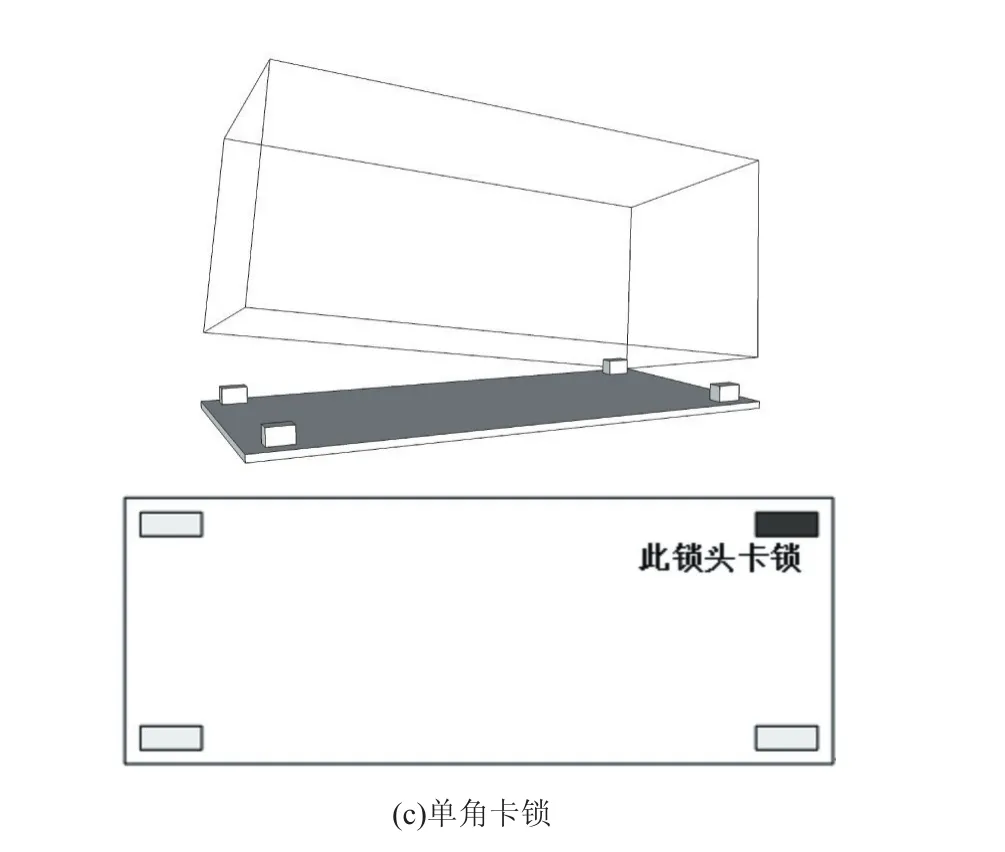
图2 F-TR锁卡锁情况示意图
2.3 锁头脱出状态的判断方法
根据前述分析,判断集装箱是否卡锁,本质上就是判断集装箱的倾斜形态,而由于集装箱倾斜形态归根结底是在横向倾斜和纵向倾斜的共同作用下形成的,所以只需要获取到横向倾斜角度和纵向倾斜角度,就可以计算集装箱总体倾斜情况,从而判断集装箱是否会出现卡锁情况。因此,可通过在起吊吊具上安装高精度双轴倾角传感器,由于吊具在起吊过程中与集装箱保持相同的倾角,就能获取集装箱吊起过程中在横向和纵向的倾斜角度,从而计算集装箱的倾斜形态,如图3所示。
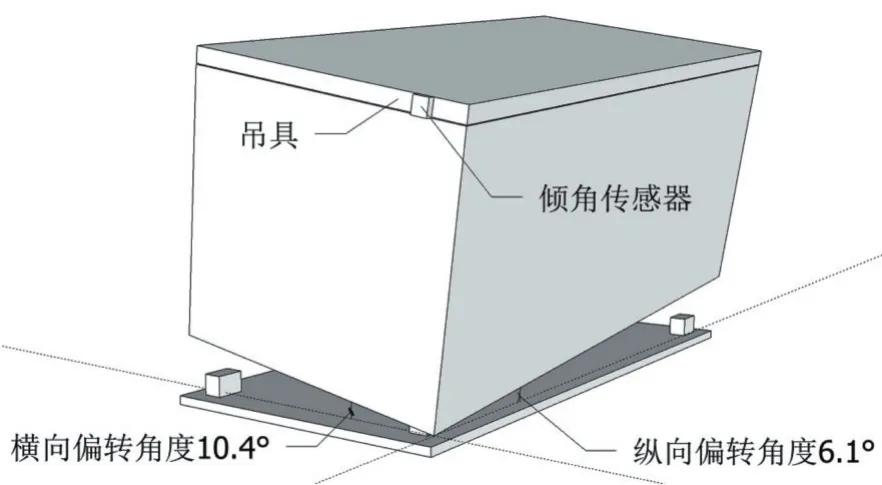
图3 集装箱倾斜角度获取
然后,可以通过估算和实测得到横向和纵向倾斜角度的阈值,当实测倾斜角度大于该值时,可认为存在较大风险会发生脱锁不完全的险情,警报设备进行报警,警示工作人员进行人工处理。按照三种卡锁情况,设横向倾角阈值为XT,纵向倾角阈值为YT,实测的集装箱横向倾角为X,纵向倾角为Y,则:
(1)当|X|〉=XT且|Y|〈YT,可能发生横向卡锁;
(2)当|Y|〉=YT且|X|〈XT,可能发生纵向卡锁;
(3)当|X|〉=XT且|Y|〉=YT,可能发生单角卡锁。
2.4 卡锁倾角阈值的估算
按照前述的卡锁情况来进行逐一进行分析:
(1)横向卡锁倾角阈值。发生横向卡锁时,如图4(a)所示,一侧刚好脱出锁头,另一侧卡锁。设锁头高度为Hl,横向两锁头之间距离为Dlh,则横向倾角阈值XT可通过式(1)进行计算。

(2)纵向卡锁倾角阈值。发生纵向卡锁时,如图4(b)所示,集装箱前侧刚好脱出锁头,后侧卡锁。设锁头高度为Hl,纵向两锁头之间距离为Dll,则纵向倾角阈值YT可通过式(2)进行计算。

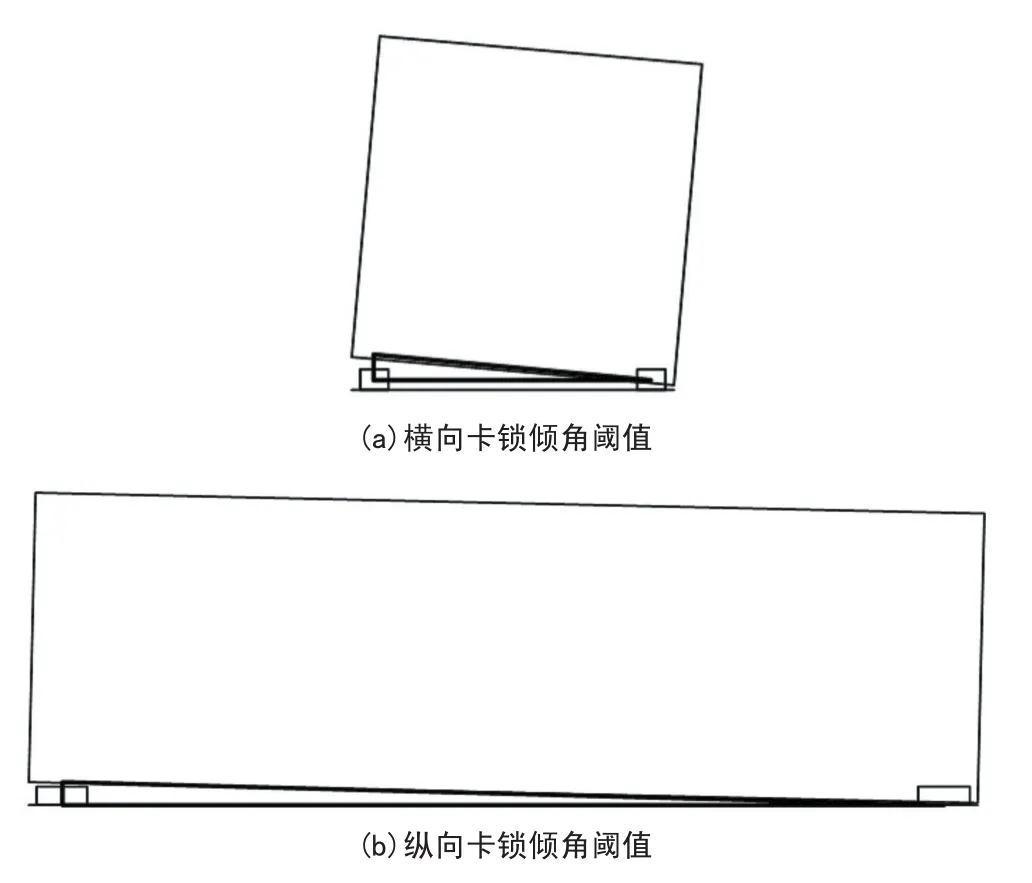
图4 卡锁倾角阈值示意图
3 系统设计与实现
3.1 组成结构
铁路集装箱平车防误吊系统主要由集装箱姿态感知前端、远距离无线数据接收器和防误吊报警终端三部分构成,如图5。
(1)集装箱姿态感知前端:由高精度集装箱倾斜感应模块、大容量锂电池和无线数据发射模块构成,能够在吊起过程中对集装箱倾斜状态进行感应,并将角度数据通过无线方式发出。
(2)远距离无线数据接收器:能够远距离接收感知前端发来的集装箱姿态数据,并将数据转给报警终端进行处理,设计工作在315 MHz或433 MHz频率。

图5 铁路集装箱平车防误吊系统组成结构
(3)防误吊报警终端:为了保证报警的及时性,设计了面向两种不同平台的报警终端设备:声光报警终端和后台监控报警平台,未来还将针对移动终端设计专用的监控报警APP。
①声光报警终端:是一个具备无线数据接收功能的声光报警器,能够接收感知前端发送的集装箱姿态数据,判断脱锁情况,并进行报警。该终端适合于直接安装在吊车操作间内,获取单路集装箱姿态数据,直接警示吊车操作人员,及时终止起吊作业。
②后台监控报警平台:是一个能够通过三维动画实时显示集装箱姿态,并根据前端发送的集装箱姿态数据,判断脱锁情况进行报警的桌面软件。该平台能够部署在货站管理人员的电脑上,方便管理人员随时监控集装箱起吊情况。
3.2 集装箱姿态感知前端设计
集装箱姿态感知前端由高精度集装箱倾斜感应模块、大容量锂电池和无线数据发射模块三部分构成。
(1)高精度集装箱姿态感应模块:用于实现对集装箱倾角的检测,其核心是高精度双轴倾角传感器。设计采用双轴倾角传感器,具备两路高精度数据输出,角度精度达到0.001°。同时,由于感知前端使用时需要安装在室外的吊具上,因此防水等级应至少达到IP 65,同时应具备较高的抗震性能。
(2)大容量锂电池:用于实现对报警终端的持续性供电,采用18650电芯作为供电核心,为了保证使用时长,电池总体容量应不低于6000 mAh,并通过电池芯片实现对电放电过程的智能化控制,延长电池供电时间。
(3)无线数据发射模块:用于将采集的角度数据发送给报警终端,采用315 MHz或433 MHz频率进行无线数据传输,为了保证传输距离与速率,设备发射功率应不低于8dBm。
3.3 后台监控报警平台设计与实现
后台监控报警平台主要由两部分构成:数据接收及计算后台程序和三维图形化显示与报警界面,如图6。
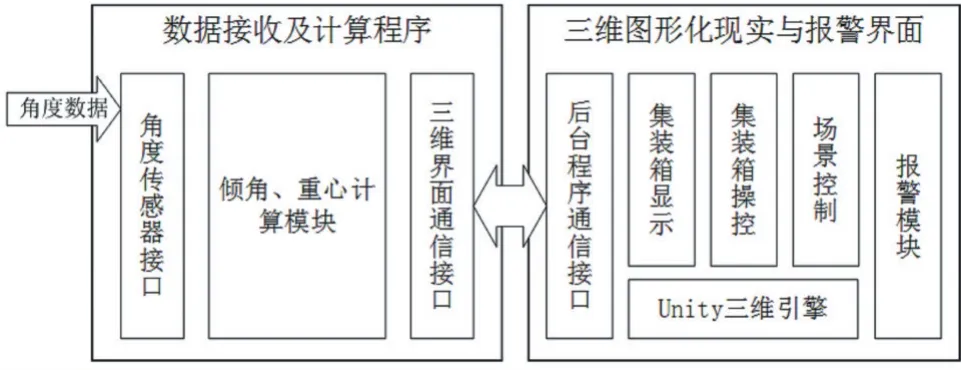
图6 后台监控报警平台架构
(1)数据接收及计算后台程序。用于连接无线接收器,在后台接收前端传感器发来的实时数据,根据实时数据计算集装箱角度参数,并将相关参数发送给三维图形化显示与报警终端。采用C++语言编写,结合传感器编程接口进行程序设计,聚合了角度计算模块,能够根据实时数据计算集装箱倾角、重心等参数。并通过Socket接口与三维图形化终端进行通信,实现数据的双向传递。
(2)三维图形化显示与报警界面。用于接收后台服务发来的数据,显示集装箱倾斜形态,并根据实时形态进行视觉和声音两类报警。采用Unity框架进行三维图形化显示,编程语言为C#。以真三维方式对集装箱形态进行显示,通过多角度虚拟摄像头进行图像角度、距离等控制,从而构建较逼真的三维场景。通过Socket接口与后台服务通信,以接收传感器采集的数据。
后台监控报警平台实际运行效果如图7所示。
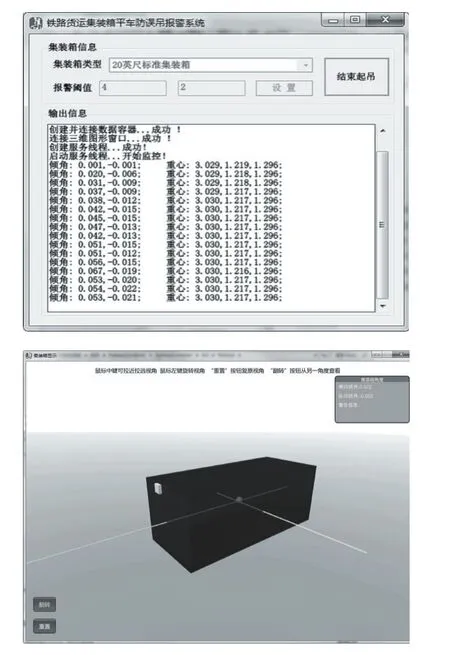
图7 后台监控报警平台实际运行效果
4 结论
本文针对铁路集装箱F-TR锁应用中误吊频发的现状,设计并实现了一种铁路集装箱平车防误吊系统,实现了对集装箱姿态的三维展示,对集装箱与平车分离状态的精确判断,并对锁头未完全脱出的危险情况进行报警,为吊车操作人员和集装箱装卸作业管理人员提供操作辅助,保证集装箱装卸作业的安全进行。经测试,本文系统工作正常,能够达到设计目的。同时,本文研发的防误吊系统还具有以下特点:
(1)具有较强的针对性:针对铁路集装箱货运中F-TR锁的具体问题进行研制,从研制之初就瞄准解决铁路货运实际问题而来,项目提出人员收集并分析了铁路集装箱运输,特别是F-TR锁集装箱使用中面临的问题,并针对这些问题进行系统设计,这就保证了研制产品具有很强的针对性和实用性。
(2)具有较高的精确度:采用高精度双轴倾角传感器作为判断集装箱F-TR锁和角件是否完全脱开的技术基础,具有较高的判断精度,避免出现误判、漏判的情况。
(3)具有较好的易用性:报警终端具备了声光报警功能,能够及时提醒相关操作人员进行处理。
[1]杨晓强.集装箱吊运作业过程中电子防摇研究[D].上海:同济大学,2008.
[2]李学军.浅析激光扫描的集装箱吊运防撞装置[J].工程技术:文摘版:00285-00285.
[3]蒲少华.铁路集装箱F-TR锁装卸安全问题分析[J].铁道货运,2017,35(2):33-37.
[4]张四梅.我国铁路集装箱锁闭装置的研究与应用[C]//世界轨道交通发展研究会年会,2011:19-21.
[5]邵玉华,左宁,薛毅,等.铁路集装箱F-TR锁脱钩安全监控系统设计[J].铁道货运,2017(8):54-58.
[6]蒋庆仙,马小辉,陈晓璧,等.双轴倾角传感器的设计与实现[J].传感器与微系统,2009,28(12):86-88.
[7]朱柱.基于Unity3D的虚拟实验系统设计与应用研究[D].武汉:华中师范大学,2012.
Design and Implementation of Railway Container TrainAnti-Misoperation System
Cheng Fuchao
(Chengdu University,Chengdu 610106,Sichuan)
To reduce the frequency of misoperation in railway container unloading,a railway container train anti-misoperation system is designed and implemented.The system which uses a variety of techniques,such as high-precision angle sensor,wireless communications,real-time 3D animation,can provide 3D display of container posture and accurate judgement of separation status of container and train.The system can also provide a dangerous alarm function for the operators,to ensure the safety of container operations.In the test,the system works properly,achieving the target of designing.
container;F-TR lock;anti-misoperation
TP212;U294.3
A
1008-6609(2017)10-0058-05
程付超(1985-),男,四川泸州人,博士,讲师,研究方向为计算机软件技术、机器学习。
猜你喜欢
商品与质量(2021年27期)2021-11-23 13:37:34
科学大众(2021年19期)2021-10-14 08:33:10
中国临床医学影像杂志(2021年6期)2021-08-14 02:21:46
北京汽车(2021年3期)2021-07-17 08:25:42
湖南电力(2021年1期)2021-04-13 01:36:50
世界家苑(2018年8期)2018-09-04 09:15:52
中文信息(2017年9期)2017-11-08 17:18:14
科技资讯(2015年17期)2015-10-09 20:54:44
机械工程师(2015年10期)2015-02-02 01:14:29
河南科技(2014年23期)2014-02-27 14:18:49