一种适于多石地面行走的刚柔耦合的仿生机械足模型设计
2017-12-07 11:03李贤邢真铭张慧刘徽
中国设备工程 2017年23期
李贤,邢真铭,张慧,刘徽
(吉林大学生物与农业工程学院,吉林 长春 130025)
一种适于多石地面行走的刚柔耦合的仿生机械足模型设计
李贤,邢真铭,张慧,刘徽
(吉林大学生物与农业工程学院,吉林 长春 130025)
雉鸡常栖息于低山丘陵,足部强健有力,适于奔跑。雉鸡足由骨骼、软组织、肌腱、韧带、关节软骨等组成。本文从生物原型的形态观察出发,结合大体解剖学,确定了雉鸡足各组织的具体分布位置及结构特点;通过雉鸡运动实验运用simi motion测量计算出雉鸡在不同速度行走及奔跑时相关运动参数。由此整理提炼出仿生信息,从而完成机械足模型的设计,达到机械足在一般粗糙路面和多石路面通过性良好的效果。
雉鸡;仿生;机械足设计
1 研究背景及目的
目前的仿生机械足多针对于某一种特殊的路面情况进行高通过性的研究设计,适用范围小。此外,多数的仿生机械足采用刚性设计,在机械运行过程中,与地面接触会产生较强的冲击,使得足部易受损,从而导致机器人运行不稳定并产生能量损耗。通过对雉鸡足宏微观结构与对雉鸡足各相关结构的形貌测量,基于相似工程原理和工程仿生技术获取用于仿生机械足的仿生信息进行仿生机械足的设计。采用adams软件,进行在两种主要地面模拟的测试分析,对仿生机械足进行进一步优化,使得其具有合理的结构且在两种地面上有一定的通过性,为仿雉鸡足的刚柔耦合机械步行足多环境适应性上提供研究思想和理论基础。
2 实验及仿生信息的提取
2.1 雉鸡足解剖实验
由于雉鸡足为生物原型,需要对雉鸡足的宏观及其结构有清楚的认识。通过合理的解剖步骤,逐层解剖与分析,获取骨骼尺寸大小、基本形状、各长度比例、控制方式等数据,为之后的机械足设计提供基础的仿生信息。为清晰观察到内部结构,需将雉鸡足表皮分离,完成后,观察皮下脂肪垫,之后将脂肪垫除去,对雉鸡足上的肌腱的作用进行观察分析。通过拉扯雉鸡足部的肌腱,记录雉鸡足各肌腱与足趾之间运动方式的联系。其中,足心处有单独控制各个脚趾弯曲抓地的肌腱,控制脚趾之间张角大小的肌腱,和控制向前的三个脚趾共同抓地的肌腱;而背部有可以控制脚趾伸展的肌腱。同时趾与趾之间有控制张角的肌腱。为方便注明各数据,对雉鸡左足趾编号,后侧趾为I趾,逆时针方向分别为II趾、III趾、IV趾。雉鸡足骨骼尺寸比例如表1。
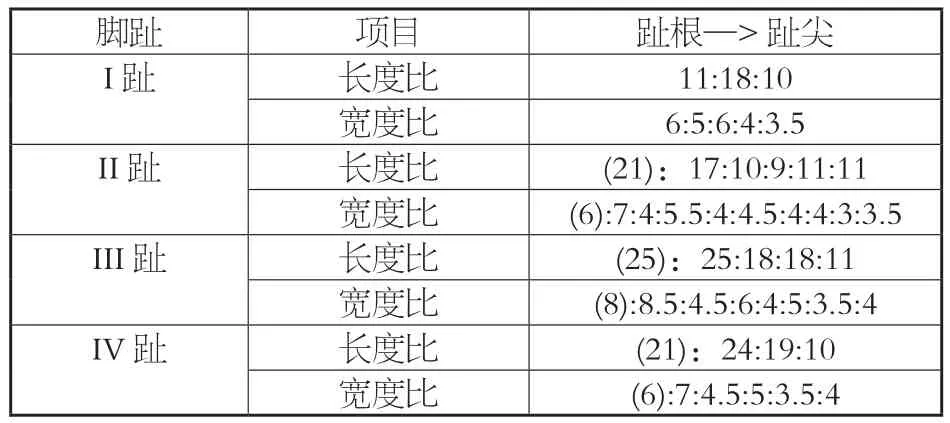
表1
通过解剖观察和雉鸡足结构的相关数据,确定以雉鸡足趾骨骼为仿生机械足的支撑架;以雉鸡足的脂肪垫缓冲作用及肌腱控制原理和分工特点,选定弹簧为机械足的控制部分,实现仿生机械足在接触地面时的缓冲作用及足趾间的灵活性。
2.2 雉鸡运动实验
通过高速摄像机记录雉鸡运动视频,对雉鸡足运动时的动作变化进行观察分析,其足部各趾触地的先后顺序及单只足部触地和悬空时间是雉鸡足运动的主要特征。本文对雉鸡足运动形态进行观察分析,并对雉鸡进行不同速度下的运动实验,得到测试对象的运动规律。
(1)实验准备。搭建试验台,以引导雉鸡运动。试验台为一台电脑控制的小型跑步机,并用透明塑料板将四周围住。为使录像清晰,背景选用蓝色的泡沫板。准备一标定架,以便simi motion软件的计算。为保证后续的数据处理中有清晰稳定的追踪点,选取白色塑料珠为标定点,分别固定在雉鸡的脖子、背脊、左大腿、左足三个长趾尖、左足足背和右足足尖处。完成预处理后,对雉鸡进行称重。
(2)实验过程。打开两台高速摄像机,对标定架进行摄像,之后将雉鸡置于跑步机上。启动机器,控制跑步机的速度逐步递增,速度到达设定速度时,按下闪光灯作为记步起点。目测雉鸡运动达到五个完整步后,停止跑步机并暂停录像,并对视频进行编号。以0.1m/s为间隔,每组速度重复3次,根据不同雉鸡情况限定其速度上限。最后整理录像视频,进行数据处理。通过SIMI motion软件,分别测出雉鸡右足足尖刚触地时间、刚离地时间、再触地时间与步长,并计算雉鸡的运动速度,如图1、2。
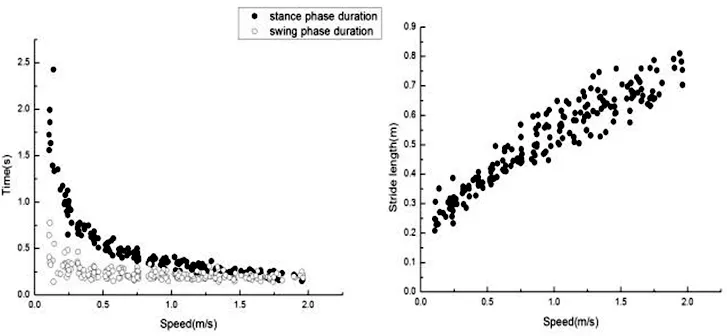
图1 雉鸡右足触地和摆动时间图像 图2 雉鸡步长变化图
(3)结论。雉鸡在运动过程中,随着速度的增加,单足的触地时间减小,摆动时间基本不变,步长加长。此外,雉鸡在运动时,以最长足趾尖先触地,而后其余结构依次落下,此过程有一定缓冲作用。故提取雉鸡足足趾尖先触地以缓冲的运动特点为仿生信息。
3 模型的建立及验证
整理仿生信息,结合雉鸡足的形貌进行仿生机械足模型设计。建立初始模型后,通过动力学仿真分析,对模型进行结构修正简化,并进行可行性研究。模型结构考虑到该机械足需产生足趾向内包络的动作,故将机械足设计为中间由压缩弹簧连接支撑,辅以四个连接拉簧的机械足趾结构。为避免受力不均匀使机构产生偏斜,将机械趾骨对称分布,图3为模型三维图。

图3 模型三维图
对该模型进行动力学仿真分析,主要分析四个拉簧所提供的拉力。此处初始设置压缩弹簧的劲度系数k=50N/mm,拉簧k=25N/mm,拉簧连接于机械趾骨下段中部及连杆远底盘0.75自身长度的位置。仿真过程中,样机整体运行平稳,能实现目的效果。由于实验以机械趾骨不被地面干涉的理想条件进行,拉簧力会产生波动。通过设置不同的拉簧k值,可得波动幅度大小不一的一组曲线,如图4、5。
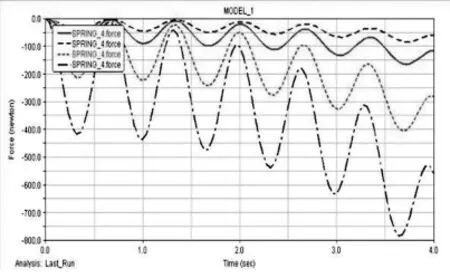
图4 拉簧劲度系数与力的关系图
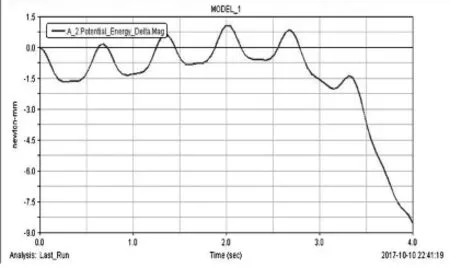
图5 机械趾骨下段势能变化图
最终选取拉簧的劲度系数于0.2~0.4的压缩弹簧k,所产生的波动小且可行性好。本次仿真取拉簧k=10N/mm,产生的拉力最大值为165.278N。由对应的机械趾骨下段势能图可知,随底盘的上升,机械趾骨所具有的能量增加(由于设置的力方向与坐标轴正方向相反,故为负值),达到包络效果。故该机械足对多石路面具有一定的通过性。
4 结语
本项目以雉鸡足为生物原型,利用工程仿生技术设计,结合机器人足端与地面接触的相关论文的查阅及分析,通过动力学分析软件,实现仿生机械步行足的设计和仿真分析,验证其具有一定的通过性,为之后进行多环境适应性的机械足研究提供初步的设计思想,并为进一步研究鸡足部构型提供了理论基础、相关数据和技术依据。
TP242
A
1671-0711(2017)12(上)-0132-02
猜你喜欢
实用手外科杂志(2022年2期)2022-08-31
实用手外科杂志(2022年2期)2022-08-31
实用手外科杂志(2022年2期)2022-08-31
实用手外科杂志(2022年2期)2022-08-31
中国伤残医学(2020年24期)2021-01-09
中国民间疗法(2020年22期)2021-01-07
当代工人(2020年8期)2020-05-25
中外医疗(2019年12期)2019-08-01
小溪流(画刊)(2017年12期)2018-01-10
儿童故事画报·发现号趣味百科(2015年12期)2016-01-25