多无人机在协同压制无线通信网链路中的应用
2017-12-06 02:22许阳明
兵器装备工程学报 2017年11期
郑 超,许阳明
(国防科技大学, 合肥 230037)
多无人机在协同压制无线通信网链路中的应用
郑 超,许阳明
(国防科技大学, 合肥 230037)
提出了利用多架无人机协同压制无线通信网单个节点的所有无线链路、阻断其正常通信的方法。首先,分析得到无人机干扰中继节点时的有效压制干扰起始位置,利用改进的差额法将待干扰节点所有无线链路分配给多架无人机。然后引入绕圈等待策略减小各无人机间的航路代价差异,并采用一致性算法协调控制各无人机飞行速度,使各无人机同时到达各自有效压制干扰起始位置实现协同压制。最后,通过仿真实验验证了该方法的有效性与可行性。
多无人机;无线通信网;协同压制;差额法;一致性算法
无线通信网一般由栅格状中继节点与传输系统组成,中继节点是无线通信网的重要组成部分,它通过定向天线与周围其它节点相连,可为与之连接的若干条中继链路提供中继交换。从无线通信网栅格状的结构特点可知,节点与节点之间拥有多条路由,各路由能够此断彼通,使通信网具有较强的可靠性、抗毁性以及安全性,因此传统“一对一”的压制干扰方式很难对其实施有效压制[1],如图1所示。
升空无人机以较强的机动性能、干扰能力,以及无人员伤亡等特点被广泛应用于通信对抗中。中继节点是无线通信网的核心,通过前期侦察搜索可得到无线通信网的所有中继节点以及中继节点的所有无线链路。若要破坏某一节点通信功能时,根据“孤岛策略”,利用多架无人机同时对其所有无线链路进行压制干扰,便可使该节点失去通信功能,造成无线通信网的局部或整体功能降低甚至瘫痪。如图1所示,只有当L15、L25、L35、L45四条无线链路同时被成功压制时,才可认为节点N5失去通信功能。
图1 无线通信网网络拓扑
针对无线通信网压制问题,本文通过对差额法及一致性算法的改进,使多架无人以机尽量小的总航路代价同时抵达有效压制干扰位置,压制目标节点的所有无线链路,降低或破坏无线通信网的通信功能。
1 无人机压制干扰节点模型
多架无人机对无线通信网单个节点实施协同压制干扰,就是通过多架无人机同时压制节点的所有无线链路,使该节点无法与其它节点正常通信。首先需要根据实际任务确定单架无人机的干扰效能,然后根据单架无人机的干扰效能规划无人机的排布位置。不论何种样式干扰机,若要形成有效压制,必须满足时域、空域、频率和能量域四个因素,任何一个因素不满足都会导致压制干扰无效[2]。接下来根据节点以及无人机的特性,分析无人机对无线链路形成有效压制干扰时的有效压制干扰起始位置。
单架无人机压制无线链路时与节点的位置关系如图2所示,由于无人机与被压制节点距离足够大,可忽略无人机飞行高度对节点接收天线增益的影响,视无人机、发射节点与接收节点在同一平面上,天线增益只与方位角θ1、θ2、α1、α1有关。
图2 单架无人机压制单条无线链路
为形成有效压制,接收机的干信比必须大于干扰压制系数。干扰压制系数是通信干扰中重要的效能指标,它定义为达到有效干扰时,通信接收机接收到的干扰功率PJ与通信信号功率PS之比[3],可表示为
Kj=PJ/PS
(1)
当采用升空无人机压制地面节点时,通信信号是地面反射传播模式,而干扰信号是自由空间传播模式[4-5],用公式表达如下
PJ=Pjt+Gjt(θ1)+Gjr(θ2)-Ljr-Lj-Bjr
(2)
PS=Pst+Gst(α1)+Gsr(α2)-Lsr-Ls
(3)
(4)
Lsr=88+40lgRs+20lgf-40lghs
(5)
式(2)~式(5)中:Pjt为干扰发射机功率(dBm);Gjt(θ1)为干扰发射天线在通信接收天线方向的增益(dB);Gjr(θ2)为通信接收机在干扰发射方向的增益(dB);Ljr为干扰信号的基本传播损耗(dB);Lj为包括极化损耗的干扰信号的其余损耗(dB);Bjr为带宽失配损耗(dB);Pst为通信发射机功率(dBm);Gst(α1)为通信发射天线在接收天线方向的增益(dB);Gsr(α2)为通信接收机在发射天线方向的增益(dB);Lsr为通信信号的基本传播损耗(dB);Ls为通信信号的其余损耗(dB);f为无线通信网工作频率(MHz);hj为无人机飞行高度(km);Rs与hs分别为两节点间距离(km)以及节点天线高度(m);dj(t)为形成有效压制时无人机与被压制节点的水平距离(km),且与时间t有关。
无人机从任意位置到达对节点形成有效压制时的位置称为有效压制干扰起始位置,多架无人机同时压制单个节点所有无线链路时的位置关系可用图3表示。

图3 多无人机压制单个节点所有无线链路
2 基于改进差额法的多无人机多任务分配
由于不同节点的无线链路数目不同,为保证每一条无线链路都能分配到无人机,等待执行任务的无人机数目往往大于或等于节点所拥有无线链路数的最大值。为实现对一个节点的通信“孤立”,在某次压制任务中,需要将节点的n条无线链路合理分配给m架无人机分别进行压制干扰,保证每一条链路分配到一架无人机,一般1lt;n≤m。无人机的初始位置在空间中任意分布,已知第i架无人机抵达第j条链路有效压制干扰起始位置的航路代价为cij,多无人机多任务分配问题就是指如何确定无人机与链路之间一一对应的分配方案,使完成任务分配的总航路代价最小[6]。针对任务分配过程中无人机数量往往大于节点链路数量的情况,可以引入虚拟任务,再采用改进的差额法解决该分配问题,该方法可有效解决无人机与链路数量不对等的分配问题[7]。
2.1 指派问题
首先,引入任务分配矩阵X=(xij)n×m来描述给定任务的状态,变量xij的取值只能是1或0,即为
(6)
式(6)中:1表示第j条链路分配给第i架无人机;0表示第j条链路没有分配给第i架无人机。该问题取极小化时的数学模型为
(7)
(8)
(9)
xij=0或1,i=1,2,…,m,j=1,2,…,n
(10)
其中,式(7)中C=(cij)m×n表示各无人机飞往各有效压制干扰起始位置的航路代价矩阵,式(8)~式(10)为约束条件,表示一架无人机最多只能压制一条链路,以及一条链路有且只分配到一架无人机。该问题的解即分配矩阵X=(xij)m×n,解矩阵的每一列有且仅有一个1,每一行只有一个1或者全为0。
2.2 改进差额法的分配模型
对于无人机数量多于任务数,且要求总航路代价最小的不平衡指派问题,可以采用改进的差额法求解。首先,增加m-n个虚拟任务,将不平衡指派问题转换成平衡指派问题,并设所有无人机到各虚设的有效压制干扰起始位置的航路代价为c=maxcij,通过改进标准差额法解决该问题,具体方法为:在航路代价矩阵的每一行每一列中,将第二小元素减去最小元素的差额列出来,标注出差额最大的行(列)中的最小元素,并划去该元素所在行与列的其他元素,表示该无人机与该任务已匹配结束将不再参与分配;再在剩下的行(列)中依次按此法寻找最小元素;若两个或两个以上元素的行(列)差额相等,则对这些相等的行(列)中最小的元素进行标注。缩减后的代价矩阵中被标注的元素对应于任务分配矩阵中的1,其余元素为0,这样就得到了初始解。
初始解不一定是最优的,因此还需要进行检验并修正。任意选取所求得初始解中某两个可组成矩阵的对角顶点,将这两个被标注元素之和与矩阵另一对角顶点上未标注元素之和比较,若前者小,说明方案无须修正;否则,将标注转移至另一对角顶点的元素上,得到总航路代价更小的新解。继续用此法修正,直至得到总航路代价最小的分配方案。
3 基于一致性算法的多无人机同时到达问题分析
为在某一时间段完全阻断待压制节点与其它节点的正常通信,要求所有无人机到达各有效压制干扰起始位置并进行压制的时刻必须是一致的。考虑到进行详细的航路规划比速度控制复杂得多,本文在引入无人机绕圈等待策略来缩小各无人机到达各自目标位置的时间差的同时,通过一致性算法,以剩余到达时间为协调变量控制无人机速度同时到达目标位置[8,9]。
3.1 绕圈等待策略
各无人机到达各自的有效压制干扰起始位置的航路代价差异往往很大,由于无人机飞行速度区间具有一定限制,即使调制速度也无法实现同时到达,此时需要对由于航路代价太小而导致过早到达的无人机引入绕圈等待策略[10],通过该方法能有效缩小各无人机到达的时间差异,为接下来通过一致性算法调控各无人机速度使其同时到达提供保证。无人机绕圈等待策略模型如图4所示。
图4 绕圈等待策略
3.2 无人机模型
将无人机抽象为直线运动的质点,其运动模型为
(11)
式(11)中:i∈{1,2,…,n}为无人机序号;Li(t)为t时刻第i架无人机距离目标位置的剩余路径长度;vi(t)与ai(t)分别为无人机的飞行速度与加速度。
飞行速度以及加速度都有一定的限制,即
在作品设计阶段,需要紧紧围绕赛题的基本要求,对各个模块的功能进行设计。首先要确定系统应该具备的功能模块,各功能模块应该围绕题干,重点突出需要完成的功能要求。其次,要进一步设计各个功能模块应采用什么方法去做,采用哪些算法来解决问题,此阶段分析的越细,开发阶段越轻松。在作品设计阶段,各组的学生可以相互交流,相互提出自己的观点,然后大家一起分析讨论,指导老师可以在分析过程中给学生一些必要的指导建议,保证作品设计的方向符合作品的要求。
(12)
无人机飞行控制系统自动驾驶仪的速度保持用一阶动态模型描述为
(13)
多无人机间通信拓扑关系如图5所示,并可用矩阵A=(aij)n×n表示,其中aij=1和aij=0分别表示第i架无人机与第j架无人机之间信息交换的存在与否。相邻无人机通过信息交换互相得到对方信息,协调控制飞行速度实现同时到达。
3.3 一致性算法
用Ti,ETA(t)表示无人机i在t时刻的预计到达时刻,用一阶微分方程描述节点状态表示为
(14)


(15)
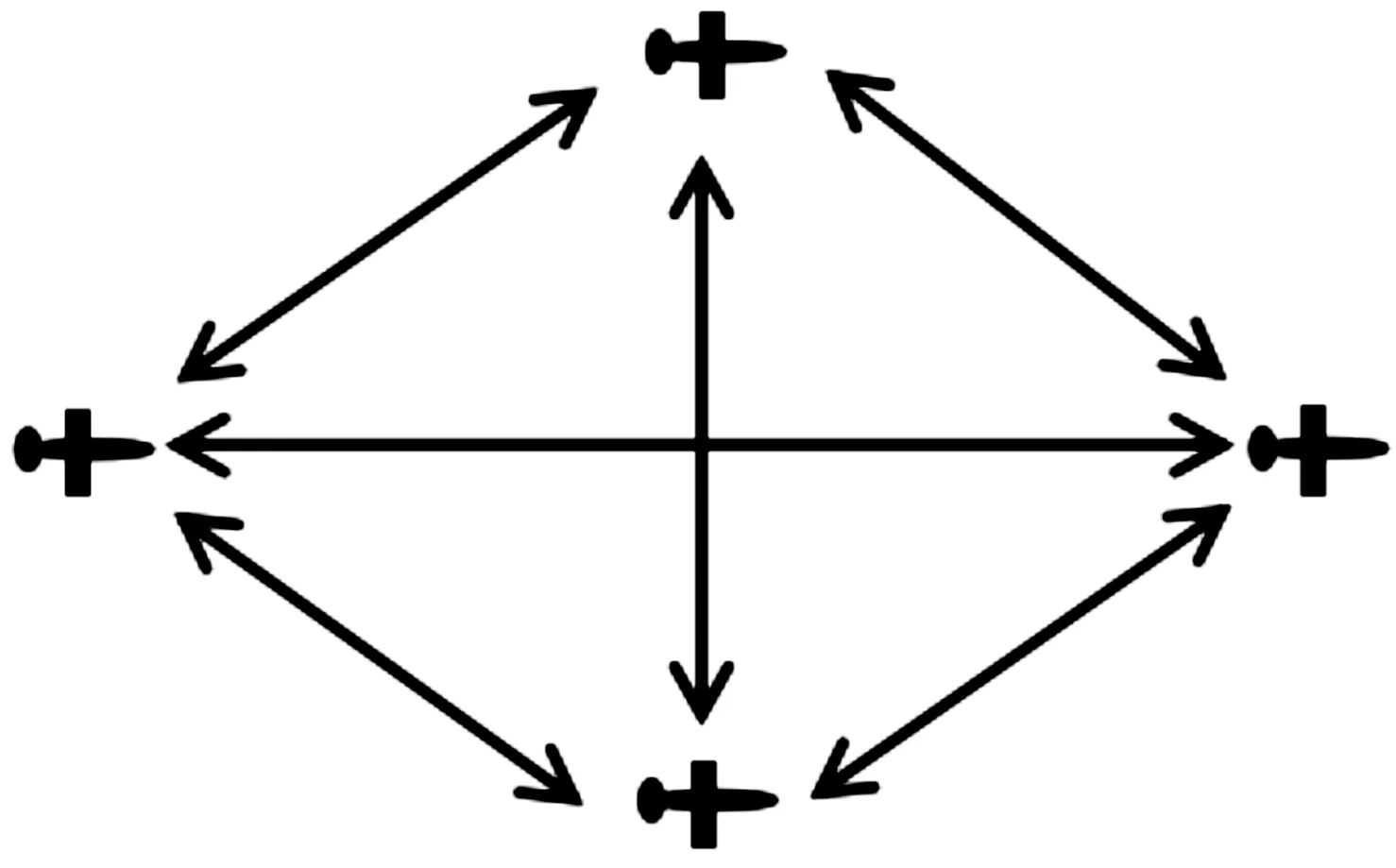
图5 多无人机通信拓扑
3.4 协同控制策略
多无人机接收到任务指令并开始执行的时刻记为时间轴的零点,即t=0时刻。已知Li(t)为t时刻第i架无人机距离目标位置的剩余路径长度,则t时刻第i架无人机的剩余到达时间可表示为
τi,ETA(t)=Li(t)/vi(t)
(16)
因此t时刻第i架无人机的预计到达时刻可表示为
Ti,ETA(t)=t+Li(t)/vi(t)
(17)
对上式关于t求导,并将式(11)、式(13)代入,得到
(18)
由式(14)、式(18)可得到速度指令为
(19)
将剩余到达时间τi,ETA(t)作为协调变量,可以得到简单的一致性控制策略,即
(20)
基于上式,系统中各架无人机最终能使预计到达时刻Ti,ETA(t)趋于一致[11-12]。
4 仿真实验
假设有五架性能相同的无人机等待执行协同压制任务,在平面坐标系的初始位置分别为(-10,80)、(30,40)、(20,-60)、(-30,-30)、(-20,30),单位为km。通过前期的侦察搜索获得待压制节点位于原点,且其四条无线链路分别指向X轴正负方向以及Y轴正负方向。
由于两个相互通信的节点天线互相指向对方,即通信发射机到接收机方向的天线增益与接收机到通信发射机方向的天线增益相同且均为最大增益,Gst(α1)=Gsr(α2)=G。压制无线通信网节点时,无人机飞行至无线链路的轴线上,此时可保证对接力机实施主瓣压制干扰,使该节点无法传递、交换各自的信息[13],即Gjr(θ2)=G,且无人机天线轴线对准节点天线,即Gjt(θ1)=Gjt。因此假设干扰压制系数Kj=3,干扰发射机功率Pjt=10 W,干扰发射天线在通信接收天线方向的最大增益Gjt=1.7 dB,通信接收机在干扰发射方向的最大增益Gjr=8.76 dB,包括极化损耗在内的干扰信号的其余损耗Lj=14 dB,带宽失配损耗Bjr=6 dB,忽略无人机飞行高度的影响;通信发射机功率Pst=10 W,通信发射天线在接收天线方向的最大增益Gst=8.76 dB,通信接收机在发射天线方向的最大增益Gsr=8.76 dB,两节点间距离Rs=20 km,节点天线高度为hs=20 m,通信信号的其余损耗Ls=8 dB。通过计算得到dj=67km。
无人机执行协同压制任务的有效压制干扰起始位置应位于节点天线轴线方向且距离节点dj=67 km的位置,因此四个有效压制干扰起始位置可分别表示为P1:(0,67)、P2:(0,-67)、P3:(67,0)、P2:(-67,0),单位为km。由计算可得各无人机到达各有效压制干扰起始位置的航路代价矩阵为
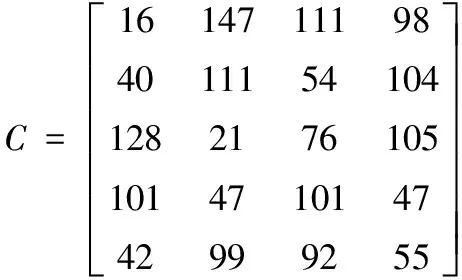
(21)
因maxcij=147,将其补充为标准的方阵为
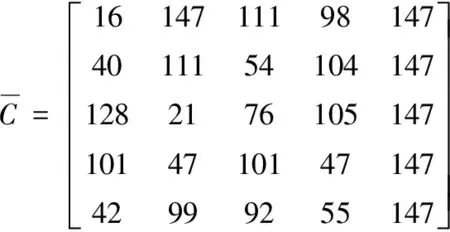
(22)
利用差额法得到缩减代价矩阵为
(23)
经检验修正为
(24)
矩阵第五列表示虚拟任务,未分配给任何无人机,即UAV5并没有分配到任务,因此得到的最优任务分配矩阵为
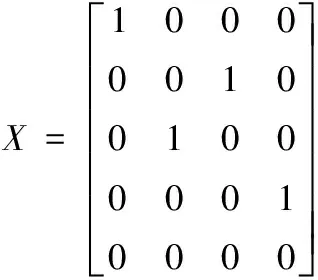
(25)
最佳分配方案为:第一条链路分配给UAV1,第三条链路分配给UAV2,第二条链路分配给UAV3,第四条链路分配给UAV4,此时的总航路代价最小为138 km。
假设各无人机的初始状态如表1所示,且每架无人机的最大与最小飞行速度均为50 m/s与30 m/s,最大与最小加速度均为2 m/s2与-2 m/s2。
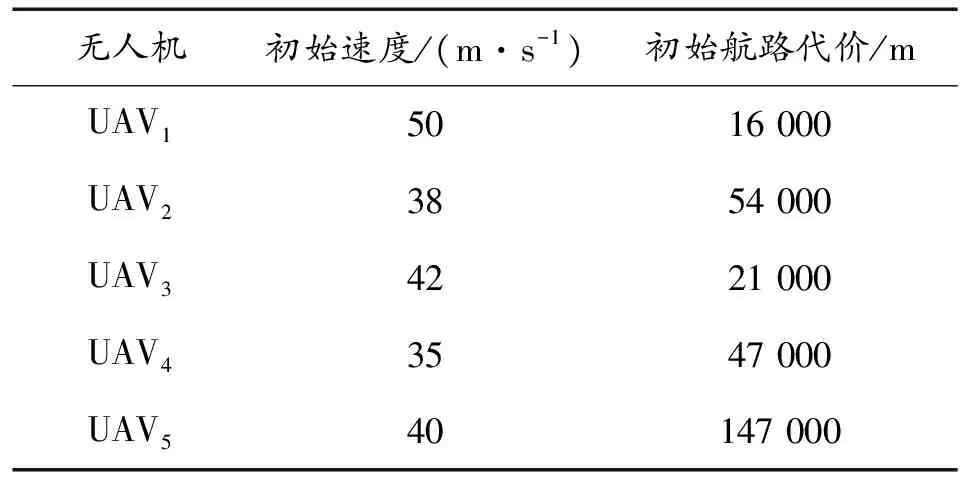
表1 无人机初始状态
每架无人机之间都能直接相互通信传递自身状态信息,且通信拓扑保持不变,即aij=1,(i≠j)且aij=0,(i=j)。设初始状态为零时刻,仿真结果如图6所示。

图6 基于一致性算法的时间协同
由图6(a)、(b)可知,当UAV1到达其指定的有效压制干扰起始位置时,其余三架无人机还未到达。假设无人机绕圈等待一圈的航程为6 km,经过试验,当UAV1、UAV3均绕圈等待三圈,即这两架无人机的航路代价分别增至34 km与39 km,再通过一致性算法可实现四架无人机同时到达,仿真结果如7图所示。
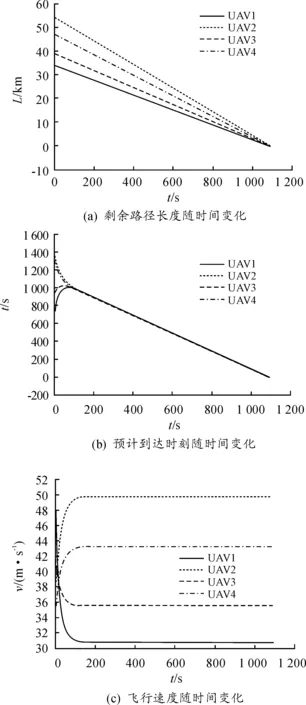
图7 带绕圈等待的时间协同
可见,通过引入绕圈等待策略同时采用一致性算法,所有无人机可同时到达各有效压制干扰起始位置对链路进行压制,且最短飞行时间为1 093 s。
5 结论
文章首先根据无线通信网的特性分析得到无人机对节点无线链路形成有效压制时的有效压制干扰起始位置,然后将单个节点的所有无线链路分配给多架无人机,并对因航路过长而提前到达的无人机引入绕圈等待策略,同时采用一致性算法协调控制各无人机飞行速度,令各无人机同时到达对应无线链路的有效压制干扰起始位置实现协同压制破坏无线通信网正常工作。本文的方法可为实际应用压制无线通信网提供参考。
[1] 杨红娃.无线通信网干扰有效性准则初探[J].中国电子科学研究院学报,2010,5(2):165-168.
[2] 张养瑞,高梅国,罗皓月,等.基于检测概率的雷达网协同干扰效果评估方法[J].系统工程与电子技术,2015,37(8):1178-1186.
[3] 冯小平,李鹏,杨绍全.通信对抗原理[M].西安:西安电子科技大学出版社,2009.
[4] 孔德强,李文生,王国民.干扰压制系数在通信对抗态势构建中的应用[J].通信技术,2012,45(11):96-101.
[5] 王海南.常用无线电传播模型的对比分析及应用[D].长春:吉林大学,2011.
[6] 毛红保,田松,晁爱农.无人机任务规划[M].北京:国防工业出版社,2014.
[7] 苏祥定,孙桐,马霖.不平衡指派问题的差额法求解及其应用[J].计算机工程,2005,31(22):178-180.
[8] 袁利平,陈宗基,周锐,等.多无人机同时到达的分散化控制方法[J].航空学报,2010,31(4):797-805.
[9] ALDO S.JAIMES B.Consensus-Based and Network Control of UAVs[C].2010 5th International Conference on System of Systems Engineering,2010.
[10] 倪良巧,王道波,蒋婉玥.时间协同多无人机编队航路规划[J].机械与电子,2016,34(2):7-11.
[11] 贾方超,姚佩阳,陈洁钰,等.多UAV集结任务的分布式协同与优化控制[J].电光与控制,2014,21(8):24-32.
[12] 徐伟,段凤阳,张庆杰,等.带参改进一致性算法在多无人机集结任务的应用[J].计算机测量与控制,2015,23(9):3133-3137.
[13] 沈楠,何俊,齐锋.投掷式干扰机压制地域通信网的作战运用研究[J].飞航导弹,2010,10:45-49.
(责任编辑杨继森)
ApplicationinMulti-UAVCooperativelySuppressingtheWirelessLinksofCommunicationNetwork
ZHENG Chao, XU Yangming
(National University of Defense Technology, Hefei 230037, China)
A method that cooperatively suppressing all the communication links of node center with multiple UAV and cutting the communication off is put forward. Firstly, the suppressing effective starting position is gotten when UAV suppresses the node center. It improves the difference method to assign all the communication links to Multi-UAV. Thirdly, it introduces the strategy of circle waiting to decrease the path cost, and based on consensus algorithm to control the velocity of UAV to make UAVs arrive at the same time. Lastly, the feasibility and effectiveness of the method is proved through a simulation experiment.
multi-UAV; communication network; cooperatively suppressing; difference method; consensus algorithm
2017-07-11;
2017-07-30
安徽省自然科学基金项目(1608085QF140)
郑超(1992—),男,硕士研究生,主要从事无人机系统与技术应用研究。
许阳明(1964—),男,副教授,主要从事无人机系统与技术应用研究。
信息科学与控制工程
10.11809/scbgxb2017.11.028
本文引用格式:郑超,许阳明.多无人机在协同压制无线通信网链路中的应用[J].兵器装备工程学报,2017(11):129-133,137.
formatZHENG Chao, XU Yangming.Application in Multi-UAV Cooperatively Suppressing the Wireless Links of Communication Network[J].Journal of Ordnance Equipment Engineering,2017(11):129-133,137.
V279
A
2096-2304(2017)11-0129-05
猜你喜欢
中国交通信息化(2022年5期)2022-07-23
文萃报·周五版(2022年28期)2022-07-19
微型电脑应用(2022年3期)2022-04-20
文萃报·周二版(2021年13期)2021-04-18
电子技术与软件工程(2019年12期)2019-08-22
电子制作(2019年24期)2019-02-23
无人机(2018年1期)2018-07-05
荷城文艺(2015年2期)2015-06-10
电子竞技(2014年5期)2014-03-26