
稀少控制条件下无人机空三加密及在公路地形测图中的精度分析
2017-12-05 07:01王刊生
测绘通报 2017年11期
郑 亮,王刊生
(中交第二公路勘察设计研究院有限公司,湖北 武汉 430056)
稀少控制条件下无人机空三加密及在公路地形测图中的精度分析
郑 亮,王刊生
(中交第二公路勘察设计研究院有限公司,湖北 武汉 430056)
针对无人机航空摄影测量地面控制点多的问题,介绍了一种无人机影像空中三角测量方法,基于动态精密单点定位,使用单台GNSS接收机获得高精度摄站点三维坐标,地面无需架设GNSS基站。通过平地、山地公路项目试验,分析了稀少控制条件下的控制点布设方法及空三加密精度,少量地面控制点即可满足1∶2000比例尺地形图的精度要求,极大减少了内、外业工作量,简化了无人机航空摄影作业方式。
无人机;空三加密;动态精密单点定位;航空摄影;公路地形图
当前,我国高速公路建设处于快速发展的阶段,公路设计面临时间紧、任务重、路线方案时有变更等问题。传统航空摄影空域申请复杂,无法满足公路设计对工期的要求。无人机航空摄影具有高分辨率、受气候条件限制少、机动性好、成本低、实时性强等优点,在公路勘测项目中的应用越来越多。无人机影像像幅小、重叠度不规则、飞行姿态不稳定,影像数量是传统航空摄影的数倍,要确保空三加密的精度就需要布设更多的地面控制点,增加了外业测量的工作量。GNSS辅助空中三角测量利用载波相位差分技术,获取摄站点坐标,作为附加观测值引入区域网平差,解决了航空摄影测量对地面控制点的依赖。
稀少控制条件下的无人机空三加密是将轻便型的高性能双频GNSS接收机集成在无人机上,利用动态精密单点定位(kinematic precise point positioning)技术,实现了单台GNSS接收机测量高精度摄站点坐标,地面无需架设基站,简化了无人机航空摄影的作业要求。空三加密时,仅在区域网四周测量少量地面控制点,即可满足大比例尺地形图测制要求。本文通过不同地形的公路项目实例,分析稀少控制条件下的无人机空三加密所能达到的精度,为勘察设计单位实施相关项目提供参考与借鉴。
1 动态精密单点定位及数学模型
精密单点定位是利用事后精密星历和精密钟差提供卫星位置和钟差,以双频载波相位和伪距组合观测值为观测资料,通过数学模型对接收机位置、钟差、对流层天顶延迟及组合后的相位模糊度等参数进行估计,采用非差分模式进行单台GNSS接收机的精密单点定位方法。精密单点定位用于航空测量动态单点定位可以达到厘米级精度,同双差固定解的精度水平相当,为高速公路长距离的动态定位提供了解决方案。
精密单点定位模型包含未知数较多,未知数之间存在一定的相关性。对GNSS观测值进行线性组合,采用星间求差方式形成单差观测值,消去GNSS接收机的钟差,同时减小未知数之间的相关性。观测值中的电离层延迟误差通过双频信号组合消除,对流层延迟误差通过引入未知参数进行估计。对于一颗GNSS卫星,其观测方程如下
(1)
式中,ρp为伪距组合观测值;ρφ为相位组合观测值;ρ为接收机天线相位中心(Xr,Yr,Zr)到GNSS卫星的几何距离;c为光速;δt为卫星的钟差;λ为波长;N为相位组合观测值的模糊度(不具有整数特性);M为投影函数;T为天顶方向对流层延迟误差;εp和εφ分别为两种组合观测值的多路径、观测噪声等未模型化误差。对于动态定位,位置是随时间不断变化的,当无周跳产生时,N为常数,T可采用模型改正,其残余部分可用参数估计。将未知数分为两类:一类是随时间变化的坐标未知数,另一类是不随时间变化的模糊度和随时间缓慢变化的天顶对流层延迟残差,式(1)线性化可得到观测值的误差方程式,以矩阵形式表示为
V=AX+BY+LP
(2)
式中,V为距离观测值残差向量;X为接收机天线相位中心坐标改正数向量;Y为模糊度参数和天顶对流层延迟残差向量;L为常数向量;A、B为相应未知数的系数矩阵;P为观测值的权矩阵。
根据最小二乘平差原理,建立法方程即可求出坐标未知数改正数向量X,A和L的计算需用到精密星历和卫星钟差产品。
2 动态精密单点定位摄站坐标获取
无人机航空摄影时,GNSS接收机与数码相机的工作相互独立,飞控系统将信号同时发送给相机和GNSS接收机,脉冲信号通过GNSS接收机的EventMark接口将曝光时刻写入时标文件,完成一次摄站位置的记录,摄站坐标解算过程如图1所示。
动态精密单点定位使用的精密星历和精密钟差由国际GNSS服务组织(International GNSS Service,IGS)提供,当前IGS可提供的观测数据产品见表1。利用精密的观测模型可以单站计算出GNSS接收机的精确位置、钟差、模糊度及对流层延迟等参数。虽然IGS提供的精密星历和卫星钟差精度较高,但是数据的采样间隔为15 min或5 min,而航空摄影时GNSS接收机的采样间隔要求小于1 s,要得到曝光时刻的GNSS摄站坐标,需要根据时标文件用线性内插方法由两个相邻GNSS历元的位置内插出曝光时刻的坐标。精密单点定位的摄站位置是ITRF框架下的坐标,需要转换到空三加密使用的工程坐标系。
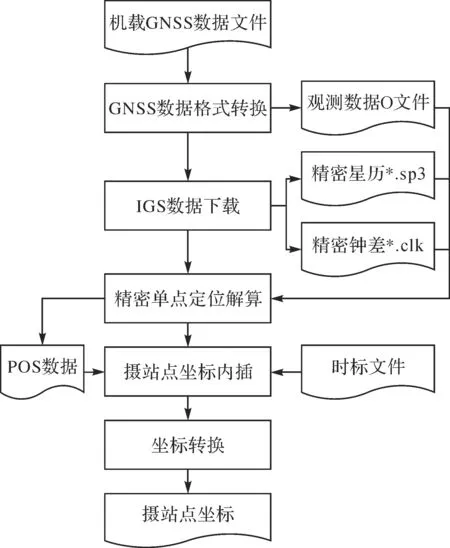
图1 GNSS摄站坐标解算过程
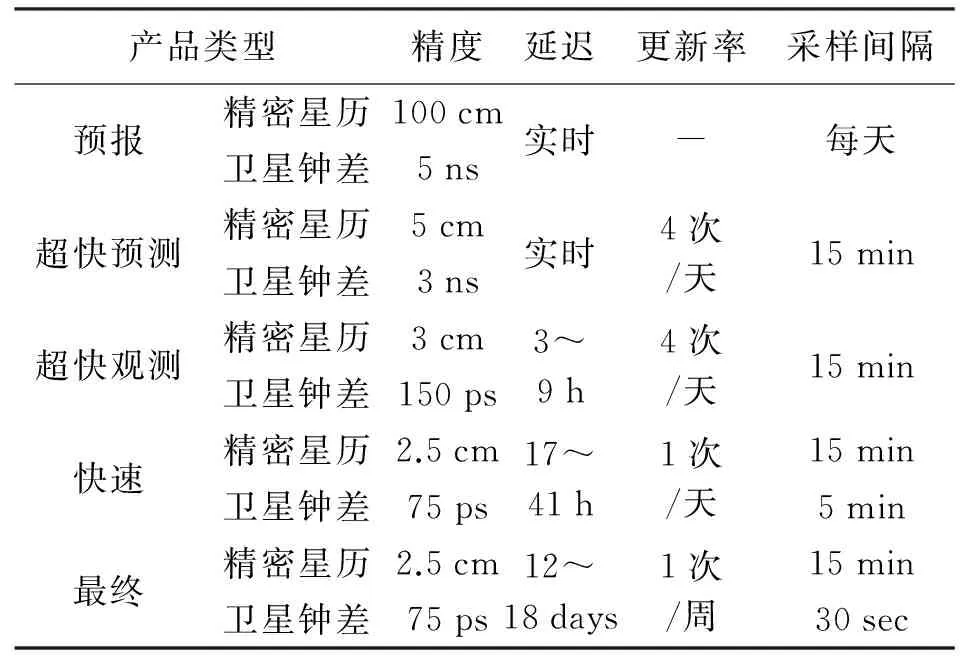
产品类型精度延迟更新率采样间隔预报超快预测超快观测快速最终精密星历100cm卫星钟差5ns精密星历5cm卫星钟差3ns精密星历3cm卫星钟差150ps精密星历2.5cm卫星钟差75ps精密星历2.5cm卫星钟差75ps实时-实时4次/天3~9h4次/天17~41h1次/天12~18days1次/周每天15min15min15min5min15min30sec
3 稀少控制条件下无人机空三加密
3.1 试验资料及方案
本文以湖北黄梅和云南昌保高速1∶2000比例尺成图项目数据为例,分析了稀少控制条件下利用动态精密单点定位的无人机空三加密精度水平,两个试验区的航摄资料参数见表2。
试验测试了4种不同的区域网布点方案:图2(a)为传统公路航空摄影布点方案;图2(b)、(c)、(d)为稀少控制条件下区域网布点方案,在区域网的四角布设4个控制点,航线首末两端加摄两条构架航线或布设两排平高控制点。
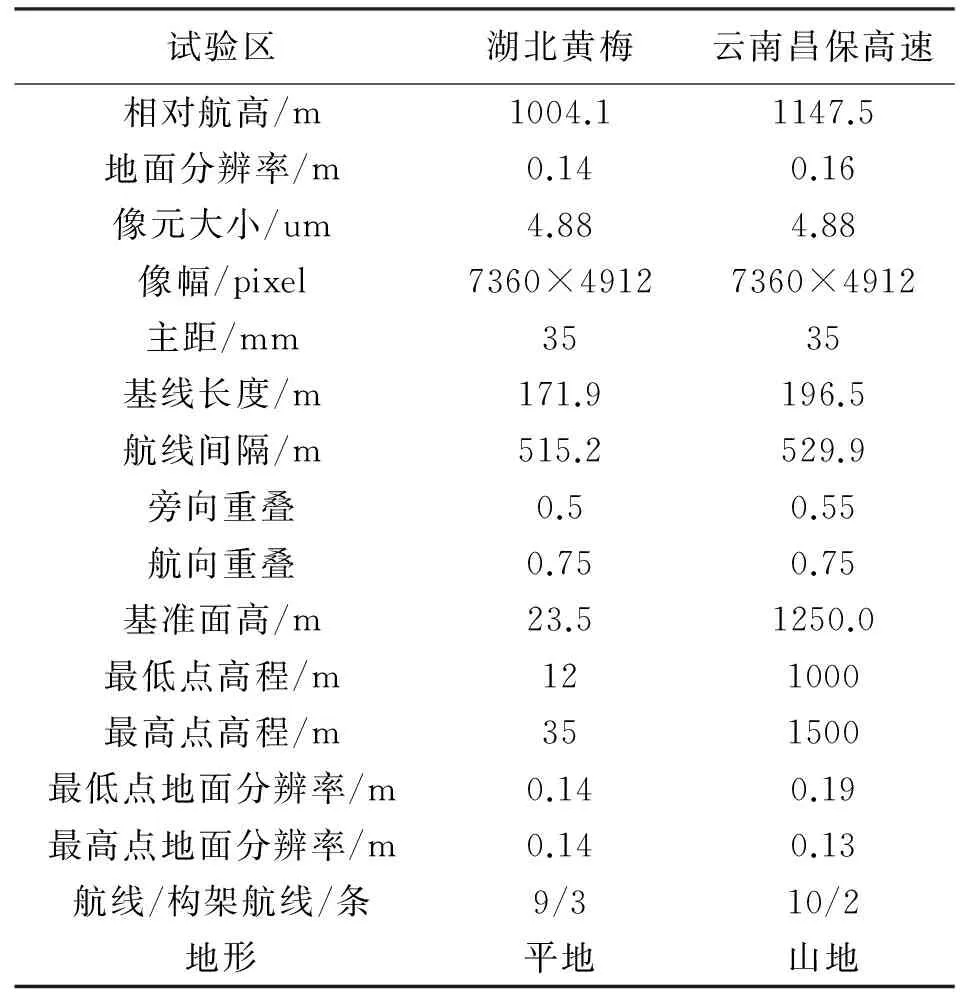
表2 试验区航摄资料参数
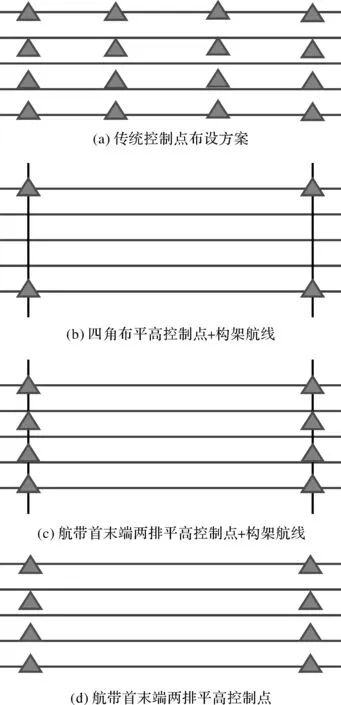
图2 区域网布点方案

3.2 平原地区试验及分析
湖北黄梅试验区地形属于平地,基于4种布点方案设计了7组试验,测试GNSS观测值、构架航线、区域网大小对空三加密精度的影响。试验1—5的区域网面积约40 km2,航线数9条,航线平均长度10 km,覆盖像片数量545张;试验6和试验7的区域网面积约80 km2,航线数9条,平均长度20 km,覆盖像片数量1027张。
表3列出了7组试验统计的空三加密精度,σ0最大为2.0(约0.4个像素),满足无人机影像相对定向的精度要求。试验1—2采用公路航空摄影的常规布点方式,检查点高程中误差小于1 m,仅满足《公路勘测规范》及《数字航空摄影测量空中三角测量规范》规定的山地精度要求;试验3—5的检查点平面中误差均小于1 m,高程中误差均小于0.28 m,满足平地1∶2000比例尺地形图的精度要求。试验6—7测试了区域网范围扩大时稀少控制条件下的平差精度变化,检查点的平面中误差小于1 m,高程中误差小于0.4 m,满足丘陵地1∶2000比例尺成图的精度要求。
分析表3的试验结果,可以得出结论如下:
(1) 试验1—2采用公路航空摄影的常规布点方式,加密后的高程中误差没有达到平原地区精度要求,这是因为试验中平高控制点间隔超出了规范要求的4—6基线,对于常规的无GNSS光束法区域网平差,地面控制点的数量和分布决定了区域网的加密精度。试验2的区域网虽然增加了构架航线,但高程精度未见显著改善,说明在无GNSS情况下,构架航线对于加密结果没有影响。
(2) 稀少控制条件下的无人机空三加密可以满足平原地区1∶2000比例尺地形图精度要求。GNSS辅助的区域网平差能够显著提高加密精度,尤其是高程精度,动态精密单点定位完全可以替代差分GNSS。
(3) 试验3与试验5的加密精度相当,说明构架航线和地面控制点的作用是基本相同的,构架航线相当于在区域网两端增加了两排空中控制点,但是构架航线上的摄站点坐标精度不及实测地面控制点,因此试验3加密的高程精度不及试验5。试验4在飞构架航线的同时增加了两排地面控制点,地面控制点对于补偿区域网系统误差是有益的,明显提高了区域网的加密精度,其中平面精度提高了9%,高程精度提高了21.6%。
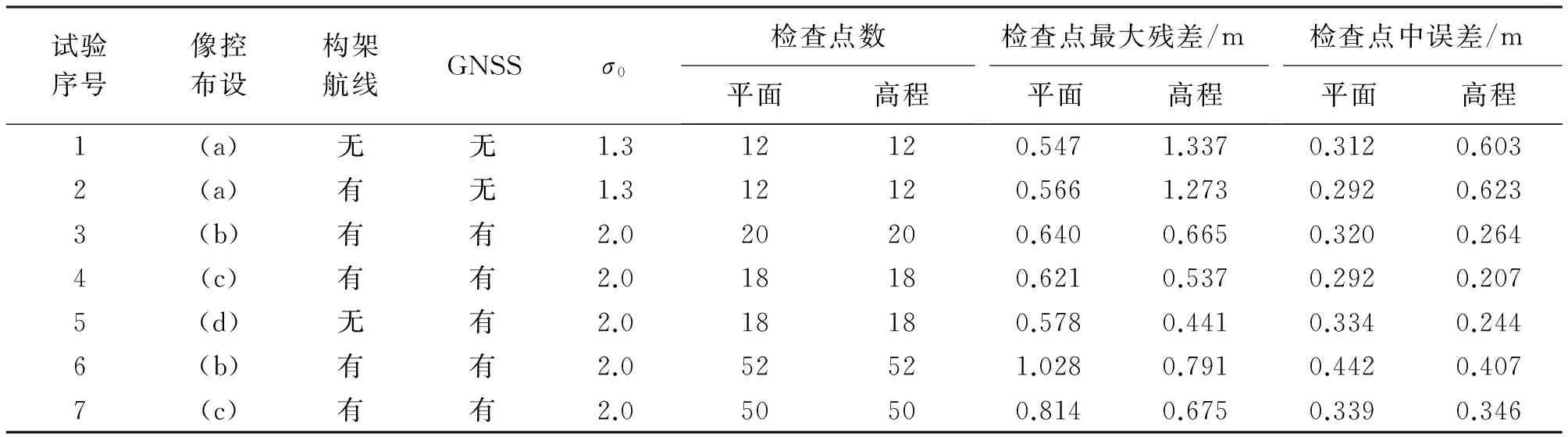
表3 湖北黄梅试验区空三加密结果
(4) 对于试验3,分别做了两组关于GNSS漂移改正的试验,试验结果如图3所示,在未作GNSS漂移改正的情况下,空三加密的平面和高程中误差远超出1∶2000比例尺地形图的精度要求。要提高区域网加密的精度,在区域网平差中引入GNSS漂移误差改正是必需的。动态精密单点定位解算出的GNSS摄站坐标,经过坐标转换后与工程坐标系之间仍然存在一定的误差。在区域网四角测量地面控制点,可使用GNSS漂移改正模型,将GNSS摄站坐标中的系统误差分离出来,仅保留偶然误差,然后通过最小二乘平差使其得到最合理的分配,从而使加密精度得到极大的提高。
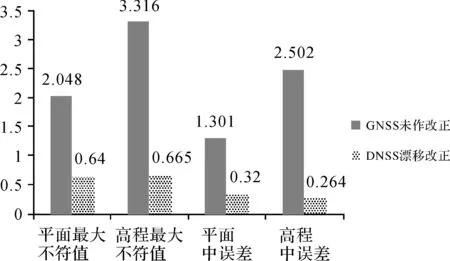
图3 GNSS漂移改正对加密精度的影响
(5) 稀少控制条件下,无人机影像的加密精度会随着区域网的增大而降低。以试验6为例,航线长度较试验5增长了一倍,高程精度下降了54.17%。高速公路具有长距离、大跨度特点,航摄过程中GNSS的观测环境是不断变化的,对于动态精密单点定位模型,对流层天顶延迟的估计并不能完全符合实际观测情况,并且观测值中可能存在未探测出的小周跳,均会造成一定的定位偏差。像片数量的增多导致摄站坐标观测值中不可避免地存在未被完全剔除的粗差,对平差精度产生影响。通过在构架航线上增加地面控制点,有助于提高区域网加密的精度。
3.3 山区试验及分析
云南昌宁至保山高速公路试验的目的是验证稀少控制条件下无人机空三加密在山区的精度。测区面积30 km2,地形最大高差500 m,根据路线走向共飞行10条航线,2条构架航线,有效像片692张。试验在区域网四角布设了双控制点,测试四角布双控制点时的空三加密精度。测区内均匀分布了28个高程控制点、15个平高控制点,空三加密结果见表4。

表4 云南昌保高速试验区空三加密结果
分析表4的试验结果,得出如下结论:
(1) 在区域网四角布设4个平高地面控制点时,检查点高程中误差小于0.4 m,完全满足山地1∶2000比例尺地形图的精度要求,达到了丘陵地高程精度。
(2) 在区域网四角布设双控制点时(每个角点布两个控制点),检查点的平面、高程中误差未见明显改善。究其原因,两个点之间相距很近,相当于提高了局部基本定向点的权重,对GNSS漂移误差改正不明显。
4 结 语
本文提出的稀少控制条件下无人机空三加密,基于动态精密单点定位测定摄站点的三维坐标,作为非摄影测量观测值纳入到区域网平差,地面无需架设GNSS基准站,解决了无人机航空摄影测量地面控制点多的问题。通过对几种典型布点方案进行试验和对比分析,表明本文提出的方法满足平地、山地等不同地形高速公路1∶2000比例尺地形图的成图要求。
实际作业中有几点建议:①区域网四角布点时,在正常航线与构架航线的交点附近布设双地面控制点,确保4个角控制点的高精度、高可靠性;②在区域网内部均匀布设少量平高控制点,一方面可用于检查区域网平差精度,另一方面可以提高区域网平差的整体精度;③当航线较长时,用构架航线+两排平高控制点的布点方案,可以提高区域网的平面、高程精度。
[1] 毕凯,李英成,丁晓波,等. 轻小型无人机航摄技术现状及发展趋势[J].测绘通报,2015(3):27-31,48.
[2] 史华林. 无人机航测系统在公路带状地形测量中的应用[J].测绘通报,2014(6):60-62.
[3] 狄桂栓,沈彪群,高波,等.免像控无人机航摄系统在公路带状地形测量中的应用与精度分析[J].测绘通报,2017(2):159-160.
[4] 袁修孝,李德仁.GPS辅助空中三角测量的若干探讨[J].测绘学报,1997,26(1):14-19.
[5] 袁修孝,高宇,邹小容.GPS辅助空中三角测量在低空航测大比例尺地形测图中的应用[J].武汉大学学报(信息科学版),2012,37(11):1289-1293.
[6] 张小红. 动态精密单点定位(PPP)的精度分析[J].全球定位系统,2006,31(1):7-11.
[7] 付建红,张云峰.组合精密单点定位在航空动态测量中的应用[J].测绘科学,2014,39(3):124-126.
[8] 袁枫,张继贤,齐维君,等.非量测数字相机实验室几何标定[J].测绘学报, 2016,45(5):601-607.
[9] 陈仲怀,廖超明,宋传峰,等.基于PPP的CGCS2000坐标计算方法研究[J].测绘通报, 2014(2):10-12.
[10] 任晓东,张柯柯,李星星,等.BeiDou、Galileo、GLONASS、GPS多系统融合精密单点[J].测绘学报, 2015,44(12): 1307-1313.
[11] 张春森,朱师欢,臧玉府,等.顾及曝光延迟的无人机GPS辅助光束法平差方法[J].测绘学报,2017,46(5):565-572.
[12] CH/Z 3003—2010 低空数字航空摄影测量内业规范[S].中华人民共和国测绘行业标准化指导性技术文件.
[13] 国家测绘地理信息局.数字航空摄影测量 空中三角测量规范:GB/T 23236—2009[S].北京:测绘出版社,2009.
[14] 中华人民共和国交通部.公路勘测规范:JTG C10—2007[S].北京:人民交通出版社,2007.
[15] 朱进,丁亚洲,陈攀杰,等.控制点布设对无人机影像空三精度的影响[J].测绘科学,2016,41(5):116-120.
UAVAerialTriangulationandAccuracyAnalysiswithScarceControlsinHighwayTopographicMapping
ZHENG Liang,WANG Kansheng
(CCCC Second Highway Consultants Co.Ltd., Wuhan 430056, China)
Against the UAV aerial photogrammetry ground control points problem, this paper introduces a UAV aerial triangulation method. The method is based on dynamic PPP, using a single GNSS receiver to obtain coordinates of the camera site. By highway project experiments, it analyses the control point layout method and the accuracy of adjustment with scarce ground control points. The proposed method greatly reduces the effort of field work, simplifies the workflow of UAV aerial photography.
UAV; aerial triangulation; kinematic PPP; aerial photography; highway topographic map
郑亮,王刊生.稀少控制条件下无人机空三加密及在公路地形测图中的精度分析[J].测绘通报,2017(11):139-143.
10.13474/j.cnki.11-2246.2017.0364.
P258
A
0494-0911(2017)11-0139-05
2017-07-11
中交第二公路勘察设计研究院科技研发项目(KJFZ-2015-075)
郑 亮(1980—),男,博士,高级工程师,主要从事公路摄影测量与遥感方面的工作。E-mail:zhengliang_313@163.com
猜你喜欢
导航定位学报(2022年5期)2022-10-13
资源信息与工程(2021年5期)2022-01-15
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
航空知识(2019年1期)2019-01-11
企业科技与发展(2018年5期)2018-09-10
导航定位学报(2018年3期)2018-09-03
环球飞行(2018年7期)2018-06-27
载人航天(2016年4期)2016-12-01
中国非金属矿工业导刊(2015年5期)2015-12-22
