江口水电站转轮改造后的静平衡试验
2017-12-02 02:15:39石茂国高金林
水电与抽水蓄能 2017年3期
石茂国,高金林
(国家电投集团重庆江口水电有限责任公司,重庆市武隆区 408506)
江口水电站转轮改造后的静平衡试验
石茂国,高金林
(国家电投集团重庆江口水电有限责任公司,重庆市武隆区 408506)
江口水电站1号水轮机转轮在运行中产生大量裂纹,为此对转轮进行了改造。为降低转轮制造过程中出现的不平衡量,新转轮在制造厂采用三点称重式静平衡装置进行了静平衡试验。本文详细论述了三点称重式静平衡装置静平衡试验原理及江口水电站1号水轮机转轮静平衡试验过程,通过试验及配重,使转轮的不平衡量小于设计允许值,从而保证了水轮机安全、稳定运行。
水轮机;转轮;静平衡
1 概述
江口水电站1号水轮机转轮改造后的型号为HLS186-LJ-343.6,重25342kg,共15个叶片,额定转速214.3r/min。为消除或降低转轮制造过程中出现的不平衡量,转轮加工完毕后在制造厂采用三点称重式静平衡装置进行静平衡试验,根据试验数据精准配重,试验周期短。
2 静平衡试验的目的及许用剩余不平衡量
2.1 静平衡试验的目的
水轮机转轮在制造加工过程中,特别是在焊接过程中,难免出现质量偏心,质量偏心的存在使机组在运行过程中产生一个附加离心力,如果该力较大,很可能导致水轮机转轮的主轴摆度增大,轴承偏磨以及不同形式、不同程度的机组振动等不良现象,影响机组安全稳定运行。为此应通过静平衡试验检查转轮偏重是否超过允许值,并通过试验数据进行配重或平衡车,使转轮的不平衡量达到允许值。
2.2 许用剩余不平衡量的计算
根据《水轮机基本技术条件》(GB/T 1546—2006)中的规定,转轮应做静平衡试验,静平衡后应符合GB/T 9239 中的G6.3级的要求。查阅《机械振动 恒态(刚性)转子平衡品质要求 第一部分:规范与平衡允差的检验》(GB/T 9239.1—2006)得许用剩余不平衡量Uper

式中Uper——许用剩余不平衡量,g·mm;
eper×Ω——所选用的平衡品质级别的数值,mm/s;
m——转轮的质量,kg;
Ω——转轮的角速度,rad/s。
将江口电站改造后的转轮有关数据代入式(1)得
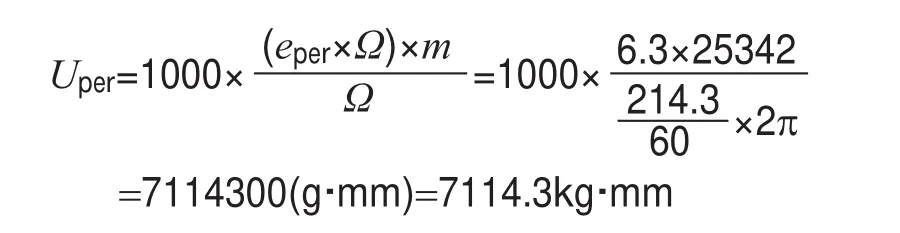
故根据上述标准及公式,江口电站改造后的转轮许用不平衡量为7114.3kg·mm。
3 转轮静平衡试验过程及计算
江口水电站改造后转轮加工制造完毕后,在制造厂采用三点称重式静平衡装置进行静平衡试验。
3.1 试验装置概述
混流式水轮机转轮三支点称重式静平衡装置,如图1~图6所示,包括通过拉板13和螺栓14固定在转轮上冠11中心孔处的圆盘状平衡板2,沿平衡板2底部圆周方向均匀设有三个压力传感器A、B、C,三个压力传感器A、B、C均通过定位销15定位在平衡板2上,三个压力传感器A、B、C位于同一均布节圆上,任意相邻两个压力传感器之间的夹角为120°,三个压力传感器A、B、C均布节圆圆心位于转轮1的中心线上,三个压力传感器A、B、C支撑于一平衡座4上,平衡座4通过调整垫铁5支撑于地面平台6上,地面平台6上还设有将转轮升起的同步顶升机构。
如图1所示,同步顶升机构包括位移传感器和液压千斤顶8,沿平衡座4四周等间距分布的四个支撑座9上均设有位移传感器和液压千斤顶8,四个支撑座9均设于地面平台6上,同步顶升机构还包括电磁阀、控制器、电脑、控制软件和连接线束,液压千斤顶8用于控制转轮的上升与下降,便于测量;位移传感器用于反馈四个液压千斤顶的同步上升与下降距离,便于电脑控制;通过电磁阀的开闭来控制进入或流出液压千斤顶的液压油量,从而操纵液压千斤顶;控制器将位移传感器的信号传输给电脑,通过对比计算控制电磁阀开闭;控制软件可控制四个液压千斤顶的上升、下降;连接线束用于控制器、电脑等的电连接。
每个压力传感器A、B、C和平衡座4之间均设有等高垫铁10(见图2),平衡板2和平衡座4之间还设有多个转轮垫高块12(见图3和图4),当不进行检测时,可用于对转轮1承重。
3.2 江口电站转轮静平衡工艺及步骤
3.2.1 保证试验精度的措施
传感器中心与转轮中心的距离精确测量是保证静平衡试验精度的关键,为此在转轮泄水锥连接的平衡板至关重要。加工平衡板时,在数控机床上与转轮同时找中心,传感器和平衡板之间通过销块固定,因此传感器的安放位置由平衡板上的孔来定位,该孔要求位置度φ0.05mm,以保证直径和角度。另外传感器的精度为万分之五,为民用级别最高。
3.2.2 安装调整试验装置
(1)安放平衡座4于地面平台6上,并通过调整垫铁5调水平,安装同步顶升机构于地面平台6上,使得转轮1重量能均匀分布在同步顶升机构上,同步顶升机构包括液压千斤顶8和位移传感器,在地面平台6上安装四个支撑座9,四个支撑座9等间距分布在平衡座4四周,每个支撑座9上均设有上述液压千斤顶8和位移传感器。
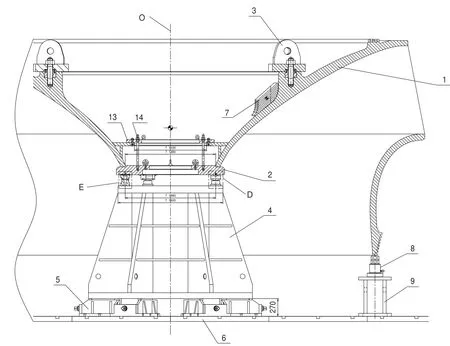
图1 混流式水轮机转轮三支点称重式静平衡装置Fig. 1 Three-points supporting weighing static balance device of Francis Turbine Runner

图2 图1中D处局部放大图Fig. 2 Local enlarged drawing at D in Figure 1
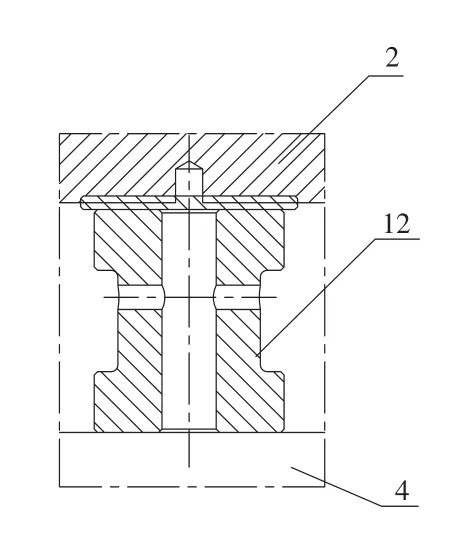
图3 图1中E处局部放大图Fig. 3 Local enlarged drawing at E in Figure 1
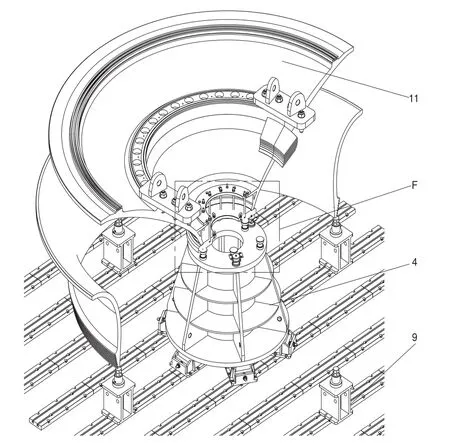
图4 混流式水轮机转轮三支点称重式静平衡装置立体结构Fig. 4 Three dimensional structure of weighing static balance device of three-points supporting of Francis Turbine Runner
(2)安装平衡板2于转轮上冠11中心孔处,并固定牢靠。
(3)在图1中吊板3处吊装转轮1于平衡座4上,并用同步顶升机构将转轮升起,使得转轮完全承重在同步顶升机构上。
(4)安装压力传感器A、压力传感器B、压力传感器C于平衡板2底部圆周上,位于同一均布节圆上(江口转轮为φ460),并且均布节圆圆心位于转轮1的中心线上,压力传感器A装在Y轴方向上,压力传感器A、压力传感器B、压力传感器C之间两两夹角为120°;各压力传感器与数据显示仪表连接到位。
(5)分别在压力传感器A和平衡座、压力传感器B和平衡座、压力传感器C和平衡座之间设置等高垫铁10,以及在平衡板和平衡座之间设置多个转轮垫高块12。
安装结束后,确保所有机电仪器安装到位,所有功能均调试正常。
3.2.3 进行转轮粗平衡
(1)控制软件下达指令,控制同步顶升机构使整个转轮下降承重于压力传感器A、压力传感器B、压力传感器C上。
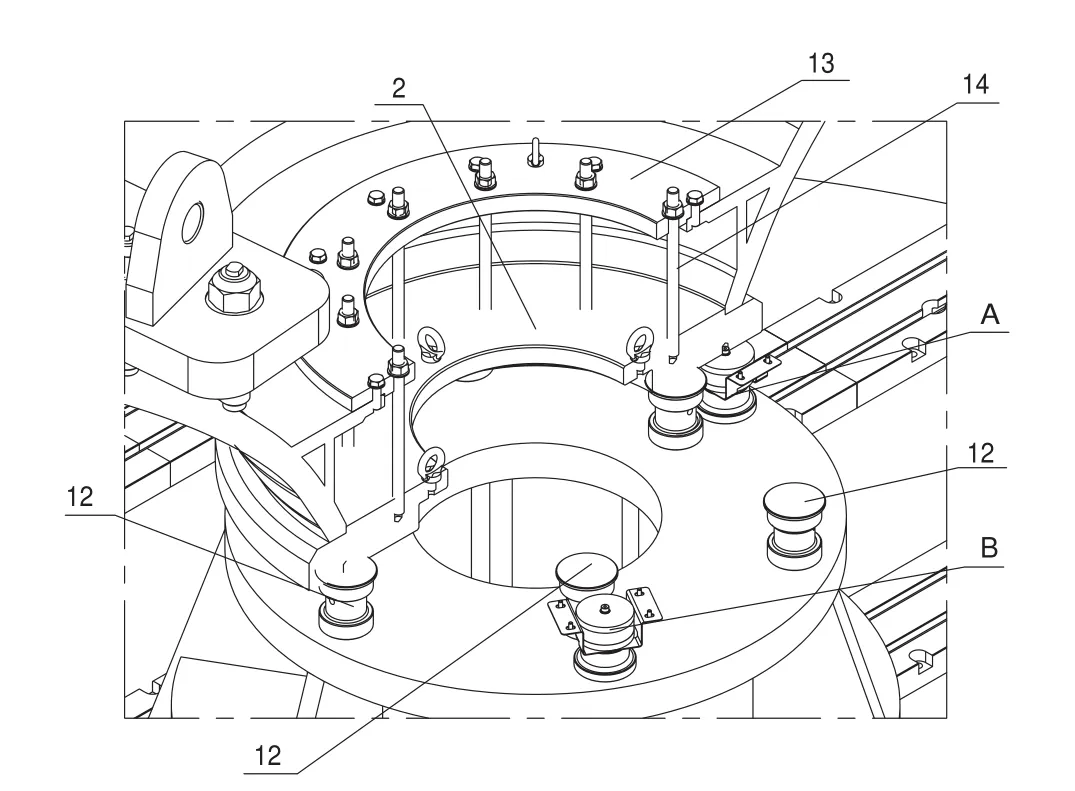
图5 图4中F处局部放大图Fig. 5 Local enlarged drawing at F in Figure4
(2)检查并调整转轮水平,然后转轮升起,使压力传感器A、压力传感器B、压力传感器C归零位。
(3)转轮再次下降承重于压力传感器A、压力传感器B、压力传感器C上,记录压力传感器A、压力传感器B、压力传感器C读数分别为FA、FB、FC,作为第一组数据。
(4)分别依次重复步骤(2)、(3)二次,再记录两组数据,总共记录三组数据。
(5)将三个压力传感器A、B、C位置绕平衡板中心旋转180°,重复步骤(2)、(3)和(4),再记录三组数据
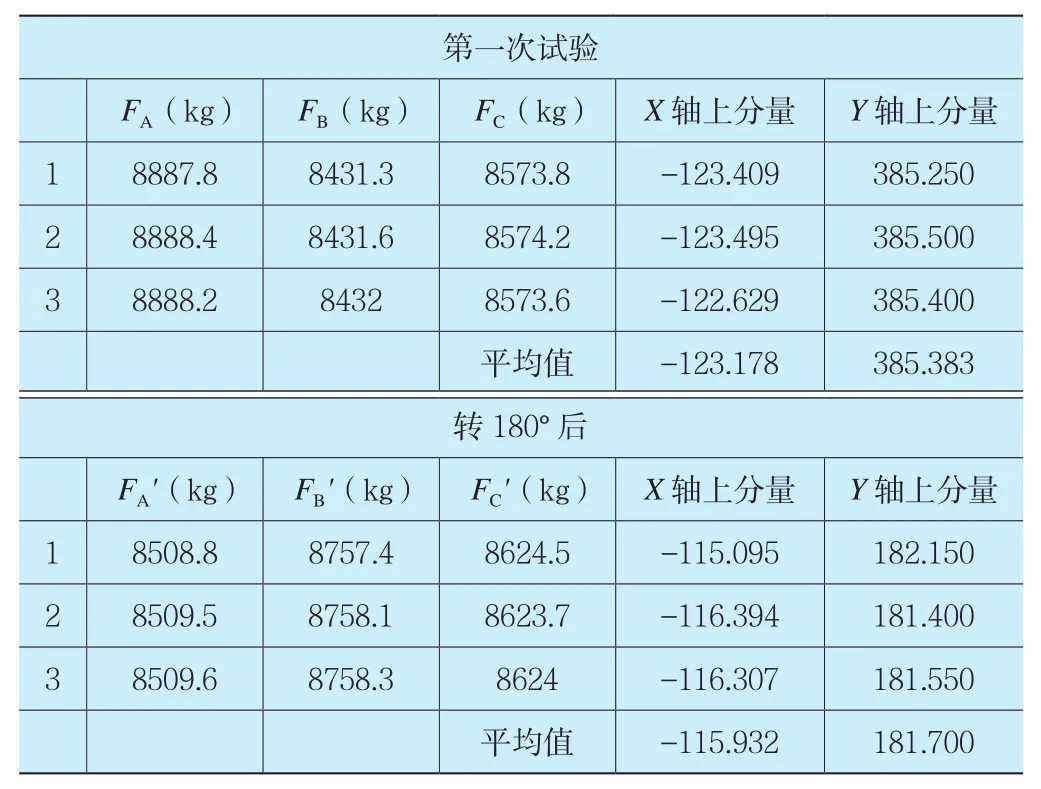
转轮粗平衡试验数据见表1。
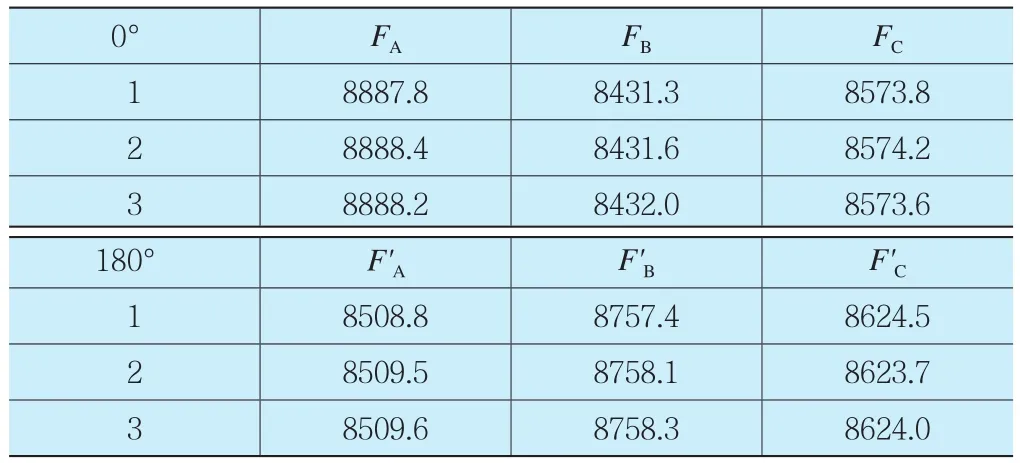
表1 江口转轮第一次静平衡试验数据 kgTab. 1 The first static balance test data of Jiangkou runner
3.2.4 计算转轮配重力F的大小和转轮配重的位置与X轴的夹角a
计算方法如下:如图6所示。
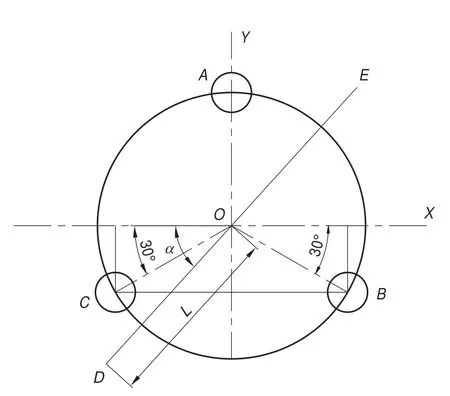
图6 压力传感器位置分布图Fig. 6 Distributing condition of weighing sensors
假设偏重点在位置E处,则配重设在与转轮中心O处中心对称点D处,则加了配重后,则D处的配重力F与压力传感器A、B、C处承受的力相对于X轴、Y轴的力矩平衡,于是由力矩平衡得到以下公式:
由A、B、C、D各点相对于X轴的力矩平衡,可得

由A、B、C、D各点相对于Y轴的力矩平衡,可得

由(2)2+(3)2可得

由(2)/(3)可得

以上式中FA——压力传感器A的读数,kg;
FB——压力传感器B的读数,kg;
FC——压力传感器C的读数,kg;
R——三个压力传感器所确定的均布节圆的半径,mm;
L——转轮配重的位置距离转轮中心线的距离,mm;
F——转轮配重力,kg;
α——转轮配重的位置与X轴的夹角,(°)。一般的,L与R有以下关系

将式(6)代入式(4)中,可得

当α=1时,转轮配重正好加在均布节圆的圆周上。
试验取得数据后,利用计算机的计算功能,只需输入六组试验数据及有关参数,即可计算出转轮的不平衡力和方位,并进行配重。
江口水电站转轮粗平衡试验结果见图7。
江口水电站转轮粗平衡结果

图7 江口转轮第一次静平衡结果Fig. 7 The first static balance result of Jiangkou runner
从粗平衡数据看不平衡量为70774.714kg·mm远大于许用剩余不平衡量7114.3kg·mm,根据设计图纸要求需在转轮上冠L650mm处以试验前确定的0点顺时针67.137°配重约109kg。
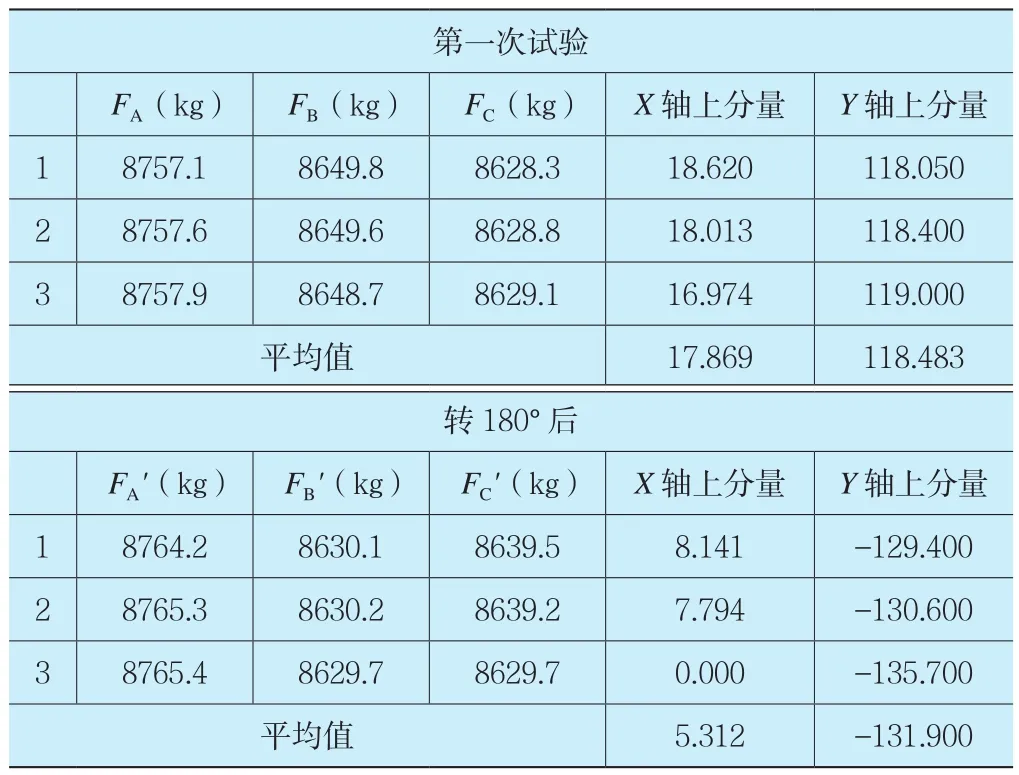
配重后,再次重复上述步骤,取得试验数据见表2。

表2 江口转轮第二次静平衡试验数据 kgTab. 2 The second static balance test data of Jiangkou runner
将试验数据输入程序,得出转轮精平衡试验结果,见图8。
江口电站转轮精平衡结果
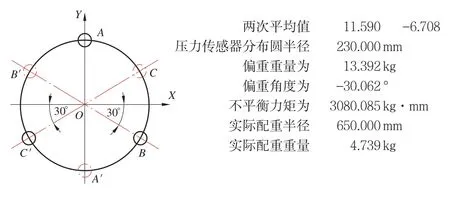
图8 江口转轮第二次静平衡结果Fig. 8 The second static balance result of Jiangkou runner
从图8可看出,转轮的不平衡量为3080.085kg·mm,小于许用剩余不平衡量7114.3kg·mm。转轮静平衡试验通过。
4 结论
江口水电站1号水轮机转轮改造运行后,未进行动平衡试验再次配重,机组各处振动、摆幅小于《水轮发电机组安装技术规范》(GB8564—2003)中的允许值,且运行稳定,达到了静平衡试验的目的,为机组稳定运行打下了良好基础。
[1] 于兰阶.水轮发电机组的安装与检修[M].北京:中国水利电力出版社,1995.YU Lanjie. Installation and Maintenance of Hydroturbine Generator set [M]. Beijing :China Water Conservancy and electric power press,1995.
[2] 刘大凯.水轮机[M].北京:中国水利水电出版社,1997.LIU Dakai. Hydroturbine[M]. Beijing: China Water Conservancy and Hydropower Publishing House,1997.
[3] 陈烈元.大型水轮机转轮立式静平衡工艺比较和分析[J].大电机技术,2011,02:34-36.CHENG Lieyuan. Comparison and Analysis of Vertical Static Balancing Methods for Large Hydroturbine Runner[J]. Large Electric Machine and Hydraulic Turbine,2011,02:34-36.
[4] 李友平,李建斌.三支点压力传感器称重静平衡法试验误差分析实例[J].西北水电,2012.增刊1:6-7.LI Youping,LI Jianbin. Practice On Error Analysis of Test by Static Balance Method of Weighing with Three-point Pressure Sensor[J]. Northwest Hydropower,Suppl.1: 6-7.
[5] 陈秀芝.水轮发电机机械检修[M].北京:中国电力出版社,2002.CHENG Xiuzhi. Mechanical Overhaul of Hydro Generator[M].Beijing;China Electric Power Press,2002.
2016-11-30
2017-05-11
石茂国(1969—),男,工程师,主要研究方向:水电站运行管理、水轮发电机组及辅助设备、金属结构的安装、调试与检修管理。E-mail:shi690707@163.com
高金林(1977—),男,高级工程师,主要研究方向:水轮发电机组及辅助设备、金属结构的安装、调试与检修技术管理。E-mail:13983399771@163.com
On Static Balancing Test for New Runner of Jiang Kou Hydro Power Plant
SHI Maoguo,GAO Jinlin
(State Power Investment Corporation Chong Qing Jiang Kou Hydro Power Co. LTD, Wulong Chongqing 408506,China)
Cracks were found on the runner of Jiang Kou HPP unit 1 under operation; to solve this problem,modification of the runner was applied to the unit. To minimize the residual unbalance,“3 pivots weighting”balancing method was applied to the runner during manufacturing at the manufacturer. It was detailed described in this paper for the basic principle of “3 pivots weighting” balancing method as well as the routines of the balancing for Jiang Kou U1 new runner. The balancing test reduced the unbalance to meet the allowable design value by means of balancing weight to ensure the turbine unit operating safely and smoothly.
hydro turbine;runner;static Balancing
TV74
A学科代码:410.25
10.3969/j.issn.2096-093X.2017.03.020
猜你喜欢
疯狂英语·读写版(2024年4期)2024-05-15 09:13:20
文史春秋(2022年4期)2022-06-16 07:13:26
考试与评价·高二版(2021年4期)2021-09-10 07:22:44
艺术品鉴(2020年3期)2020-07-25 01:53:42
四川工商学院学术新视野(2020年1期)2020-07-24 09:05:42
学生天地(2020年22期)2020-06-09 03:07:40
东坡赤壁诗词(2019年5期)2019-11-14 10:36:10
中国修船(2017年6期)2017-12-22 00:45:01
上海大中型电机(2017年3期)2017-11-13 03:38:54
中国石油大学学报(自然科学版)(2015年2期)2015-11-10 06:08:07