基于方位测量的地下管线探测系统设计与研究
2017-12-01 00:33王国方
电子设计工程 2017年22期
王国方
(陕西能源职业技术学院陕西咸阳712000)
基于方位测量的地下管线探测系统设计与研究
王国方
(陕西能源职业技术学院陕西咸阳712000)
随着现代信息化技术的发展,在当前的地下管线探测工作中,亟待应用信息化手段设计出地下管线探测系统,实现对地下管线探测工作的信息化管理;对此本篇基于方位测量技术,从系统需求分析、系统结构、系统功能设计等多个方面,优化设计地下管线探测系统。结果证实,基于方位测量下,优化设计地下管线探测系统,可以根据地下管线的形状以及位置进行探测,提升探测精度,还可以使地下管线探测免受环境影响,规避地下管线探测系统应用场合受限的缺点,发挥积极设计实现效益。结论表明,基于方位测量技术优化设计出地下管线探测系统,可以提升地下管线探测精度,降低环境对探测结果的影响,提升系统应用效益,可以在实际中推广应用该系统设计方法。
地下管线;方位测量;管线探测系统;设计
针对目前在地下管线探测系统设计中,基于方位测量下,优化设计地下管线探测系统,可以根据地下管线的形状以及位置进行探测,有助于提升地下管线探测精度[1],还有助于使地下管线探测免受环境影响,规避地下管线探测系统应用场合受限的缺点,具有积极的设计实现效益。以下本篇对此做具体分析。
1 方位测量技术
方位即地平经度,是一种两面角,即午圈所在的平面与通过天体所在的地平经圈平面的夹角,以午圈所在的平面为起始面,按顺时针方向度量[2-4]。方位的度量亦可在地平圈上进行,以北点为起算点,由北点开始按顺时针方向计量。方位的大小变化范围为 0°~360°,北点为 0°,东点为 90°,南点为 180°,西点为270°。方位测量即通过应用方位测量仪器,测量出测量物体所处地面参照物的方位。
相关计算公式如下所示:
两点间距离公式:

直线方位角
方位角:由标准方的北端起,顺时针方向旋转到直线的水平角称为该直线的方位角。
线段OB方位角≠线段BO方位角

仪器架O点,后视B点,拔β角,仪器读数为K。
OC的方位角:αOC=αBO+K(正方向拔角)=αBO+β
αOC=αBO+k-360°(反方向拔角)=αBO-β。
2 系统设计需求分析
在当前进行地下管线探测中,在复杂地质条件和深层的地下管线开挖施工过程中,若是应用传统的基于物探检测仪器以及人工测量的手段,将会存在一定的局限性,由于对既有地下管线探测数据掌握得不够准确,又缺乏对地下管线的位置与形状走向的数据,缺少精确检测手段[5-8]。若是对于被检测地下管线的管径相对较小之时,如针对地下有信息管线的情况,则在无形中将会增加探测地下管线的难度;对于在地下存在许多管线的情况,地下的管线如网状的密集交错,这样就会造成实际得出探测结果的高度耦合,降低探测结果精度;同时,在实际探测地下管线过程中,其探测信号也容易受到城市空间中的电磁干扰,也会因为地质状况、交通环境等综合的因素,影响地下管线测量数据精度,增大探测结果误差,使地下管线探测作业失去意义[9]。因此,在本次设计的地下管线探测系统中,将会基于方位测量,优化系统地下管线探测规程,可以提供地下管线三维检测数据,提升检测精度,使设计的系统满足实际应用需求。系统中可以实时采集传感器数据和里程计的数据,并对数据进行预处理后,传输到地下管线探测系统中,确保系统在接收到系统中探测传感器发生的数据之后,可以重建地下管线的三维位置图,并能够实时的显示出管线在地下的三维空间图像,使设计的系统满足实际应用需求。
3 基于方位测量优化设计地下管线探测系统
3.1 本次系统的结构设计
基于本次设计的方位测量地下管线探测系统设计之中,应该能够从整体上对系统进行优化设计,优化系统的结构设计工作,确保系统中的各组成部分之间可以相互协调,并且可以相互配合完成对底线管线的探测工作[10]。系统设计原理是通过测量管线内离散点上管线中心线的切线方位角,然后利用离散点上的这些信息来重建整个管线的形状位置[11-13]。在系统的总体设计中,通过分析被测地下管线的特征,然后在此基础上优化总结出系统的相关设计指标,可以将系统分为若干个不同的模块,并针对各模块开展功能设计,确保设计的系统发挥实用价值。对于本次系统结构设计中,系统将会被分成三大不同的子系统,分别是“控制与可视化子系统”、“介入式探测头子系统”以及“牵引与拖曳子系统”。系统结构主要参见图1所示。
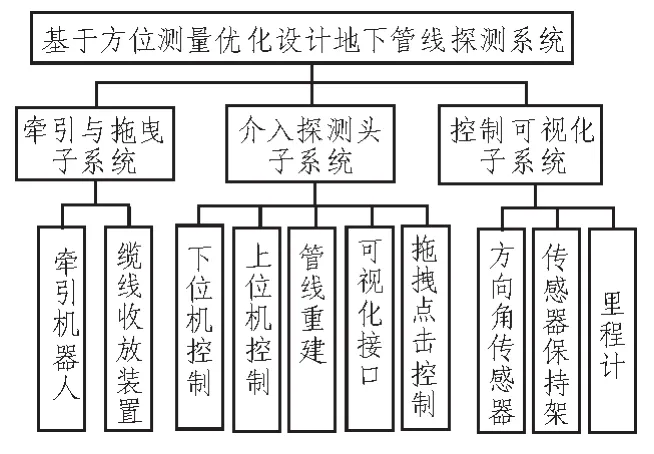
图1 系统的总体结构图
3.2 系统功能设计
在实际设计基于方位测量的地下管线探测系统中,对于其牵引与拖曳子系统的功能,利用管线外部缆线的拖曳装置,以此能够驱动地下管线探测中探测头可以沿管线来前进,并能够感知同地下管线地下方位相关的三维几何参数。应用牵引机器人,并保证可以在30分钟之内完成对100 m长探测头缆线的牵引工作,在完成缆线牵引工作之后,可以由牵引机器人自动把钢缆移交到缆线收放装置中,然后可以控制地下管线探测头运动,从而实现对缆线收放以及地下管线探测头启停的管控功能。
系统中的介入式探测头子系统设计中,其功能主要就是可以对测量对象的空间形状结构进行实时分析,然可以便于更精确地获得地下管线的方位测量信息。主要负责管线内相关数据的采集、测量及传输,以保证系统探测底线管线的精度。
设计基于方位测量的地下管线探测系统中,对于其控制与可视化系统部分的功能,可以负责调控系统的整体探测过程,并可以根据探测头得到的地下管线信息,而重建出整个管线在地下的形状位置,并在系统的人机交互界面中实时显示出来,以供施工单位以及相关市政规划部门参考。
3.3 系统硬件设计
基于方位测量优化设计地下管线探测系统设计中,对于其方位测量中,应用英国雷迪RD4000管线探测仪作为地下管线三维位置探测仪器,探测仪器性能参数满足本系统的设计指标,如表1所示。
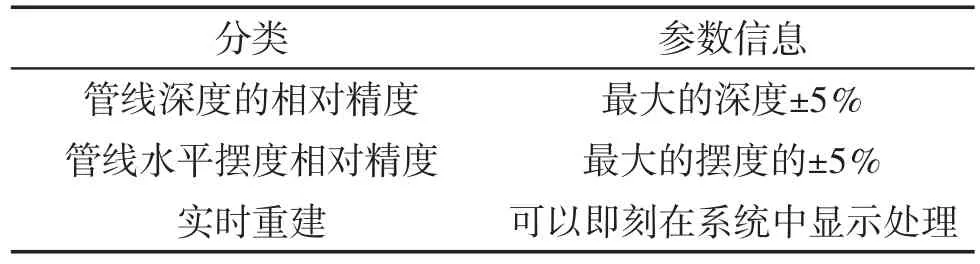
表1 仪器的参数
基于方位测量技术,优化设计系统,对于系统中的方向角传感器采用可测量翻滚、俯仰和偏摆角的三轴电子罗盘。同时,在地下管线探测系统设计中,应用单片机ATMEL80C51系列控制系统的下位控制盒以及拖曳电机单元,构成控制系统CPU部分;同时采用基于RS485的通讯协议与系统中的上位控制器进行通讯[14-16]。在系统设计中,能够应用计数器设备对光编脉冲计数,并且能够在系统Mcu中保存计数器的数值,最后可以通过串行通讯的方式将数字传送给系统的上位机,这样可以测量采样点间的位移变化[17],从而使设计的系统满足应用的需求。
3.4 系统软件设计
设计基于方位测量的地下管线探测系统中,采用VC++语言编写管线重建软件及可视化人机接口,确保设计的系统满足实际用户应用需求。通过测量管线内离散点上管线中心线的切线方位角,然后利用离散点上的这些信息来重建整个管线的形状位置。其中切线方位角指的在管线截面中心线曲线在离散点上的切线方向,即相对于水平面的倾角和水平面内投影的摆角,采用重力倾角传感器和磁阻传感器分别测得。同时,应用软件编程方法,在系统中设置地下管线探测技术指标:
①可以探查地下管线中隐蔽管线点的精度:确保其平面位置的限差达到δts=0.10h,埋深限差达到δth=0.15h(其中,应用h表示地下管线的中心埋深,其计量单位是厘米,若是h<1 m时,则能够应用100㎝来代入计算精度)。
②对地下管线埋深量的探测精度:若是管线的埋深<2 m之时,其量测埋深限差为5㎝,当埋深为2~4 m时,其量测埋深限差为8㎝,当管线埋深≥4m时,确保其量测埋深的限差达到10㎝。
③地下管线点的测量精度:确保临近控制点的平面测量误差不大于±5㎝,高程测量误差不能够大于±3㎝。
④电缆根数(包括总孔数与已用孔数)计数错误率<3%。
⑤管线规格(包括管径和方沟断面尺寸)的量测限差为±5 cm。
3.5 应用探测
为验证本次设计系统的应用价值,进行系统应用探测试验。被测管线为实际非开挖工程中使用的地下管线。探测管线总长度63 307.215 m,管线明显点1 641个、隐蔽点1 102个。为能够模拟出在实际中地下管线可能会出现的各形状,因此,可以沿管线每隔一定距离设置一个数据采集点,详见表2。

表2 地下管线探查工作量统计表
实际中,可以将介入式探测头在收放线机构的拖曳下能够沿管线进行移动,并且可以应用里程计实施自动的记录下在管线内探测头的移动距离。然后,在采集到探测头的所有数据点信息之后,就可以完成对整个管线的重建工作。与此同时,可以在系统中显示出关于地下管线的三维城建图像,也可以输出在水平面、竖直平面内中管线的投影图与坐标值。最后,就可以根据地下管线的长度,优化设置管线探测点,满足施工需求。系统的性能参数,参见表3。

表3 系统的性能
对于本次设计的地下管线探测系统,将其应用到实际管线探测中,可以降低探测深度的相对误差,比例达到2.8%,而起水平摆度的相对误差比例则是5.7%,该探测误差能够满足预先对系统探测精度设定的需求,提升系统设计之后的可用性。
4 系统设计效益分析
基于方位测量下,优化设计地下管线探测系统,可以根据地下管线的形状以及位置进行探测,提升探测精度,还可以使地下管线探测免受环境影响,规避地下管线探测系统应用场合受限的缺点,发挥积极设计实现效益。同时,基于方位测量技术优化设计出地下管线探测系统,可以提升地下管线探测精度,降低环境对探测结果的影响,提升地下管线探测系统的实际应用效益,可以在实际中推广该设计方法。
5 结 论
综上所述,基于方位测量技术优化设计出地下管线探测系统,可以提升地下管线探测精度,降低环境对探测结果的影响,提升系统应用效益,可以在实际中推广应用该系统设计方法。
[1]李均瑶.基于方位传感器的非开挖地下管线探测的应用研究[D].上海:上海大学,2007.
[2]陆麒.基于方位测量的地下管线探测系统总体设计与装置研究[D].上海:上海大学,2007.
[3]金洪日,沈林勇,章亚男,等.基于方位传感的地下管线探测系统的研制[J].上海大学学报(自然科学版),2008,14(1):26-30.
[4]王树申,张嵩,赵延升,等.基于地磁成像的管线探测系统[J].工矿自动化,2010,36(4):25-28.
[5]龚大利,张嵩,李辉,等.基于磁异常信号的油田地下管线探测方法[J].大庆石油学院学报,2011,35(6):102-106.
[6]吴金锋.地下通信管线探测方法的探讨[J].城市建设理论研究(电子版),2013(6).
[7]王敬欣.地下通信管线探测方法[J].科技传播,2012,(14):169,168.
[8]吴庐山.基于地下管线轨迹测量系统的光纤陀螺振动特性研究[D].上海工程技术大学,2014.
[9]朱青松,叶如燕,李宏昭等.一种地下金属管线探测器测深补偿算法研究[J].测控技术,2016,35(8):6-9.
[10]欧石生.电子标识系统在非金属材质管线的探测应用与研究[J].城市建设理论研究(电子版),2014(2).
[11]江周勇.RD-PCM管线电流测绘系统在重庆市地下管线探测中的特殊应用[J].地球,2015(4):305-306.
[12]范娟娟,鞠建荣.基于Android的管线移动采集更新系统设计与实现[J].城市勘测,2016(1):98-100.
[13]葛轶洲,张小蓟,王大龙,等.基于DFT算法的地埋金属管线探测仪研究[J].电子测量与仪器学报,2013,27(10):986-991.
[14]徐桂芳.移动GIS在城市基础设施探测中的开发与应用[J].新材料新装饰,2014(10):504.
[15]向乾,党幼云,张周熊,等.智能变电站温升在线监测IED的设计与实现[J].陕西电力,2013(7):59-64.
[16]张利平,张武军,郑望.西门子RS485中继器在风机控制系统中的应用[J].工业仪表与自动化装置,2014(3):88-89,97.
[17]龚大利,刘得军,叶珲,等.基于OpenGL的油田地下管线探测数据三维成像方法[J].大庆石油学院学报,2011,35(6):97-101.
Design and research of underground pipeline detection system based on azimuth measurement
WANG Guo⁃fang
(Shaanxi Energy Institute,Xianyang712000,China)
With the development of modern information technology,in the current underground pipeline detection,using the means of information to design underground pipeline detection system,realize the information management of underground pipeline detection;this article based on range measurement technology,many aspects from the system requirements analysis,system structure,system function design,optimization design of underground pipeline detection system.The results confirmed that based on azimuth measurement,optimization design of underground pipeline detection system can detect according to the shape and position of underground pipelines,improve the detection accuracy,but also can make the detection of underground pipeline from environmental influences,to avoid the detection of underground pipeline system applications limited shortcomings,design play a positive benefit.Conclusion shows that the range measurement technology to optimize the design of underground pipeline detection system based on underground pipeline can improve the detection accuracy,reduce the environmental impact on the detection results,enhance the effectiveness of the application system,the system design method can be applied in practice.
underground pipeline;azimuth measurement;pipeline detection system;design
TN99
A
1674-6236(2017)22-0054-04
2016-09-09稿件编号:201609106
王国方(1987—),女,山西运城人,硕士,讲师。研究方向:电子商务,地球物理勘查技术教学和科研。
猜你喜欢
幼儿园(2021年12期)2021-11-06
民用飞机设计与研究(2019年4期)2019-05-21
成都信息工程大学学报(2018年4期)2019-01-23
电子制作(2018年23期)2018-12-26
传感器与微系统(2018年7期)2018-08-29
石油化工建设(2017年2期)2017-06-05
电子制作(2017年10期)2017-04-18
电子制作(2017年9期)2017-04-17
中国修辞(2016年0期)2016-03-20
幼儿100(2016年28期)2016-02-28