
一种水面漂浮垃圾清扫机器人
2017-11-29 00:46王居鑫吴佳霖刘达夏长春辛绍杰
大陆桥视野·下 2017年12期
关键词:机器人
王居鑫+吴佳霖+刘达+夏长春+辛绍杰

【摘 要】针对目前公园等景区水面上的漂浮垃圾的清扫难题,提出并研制一种水面漂浮垃圾清扫机器人。该型机器人在行进过程中能将水面漂浮垃圾聚集收容,还能根据需要扩展打捞面积,实现了高效、省时、省力地实现水面垃圾打捞的效果,有很好的市场化前景。
【关键词】机器人;水面垃圾清扫;伸展单元;无线控制
引言
环保清洁设备是随着人们对环境保护要求的提高而发展起来的一类设备。目前公园景区里的湖面有许多诸如湖边树木的落叶等轻质的漂浮物,对环境景观造成不美观,更会形成一定的污染。目前树叶等漂浮物大多是采用人工打捞或者是使用简易的打捞船,人工打捞费时费力,需要工人划船进行地毯式的打捞,现有的遥控打捞船对于打捞面积相对局限,两种方案的工作效率较低,打捞工作费时费力。
1.水面垃圾清扫机器人基本功能与单元设计
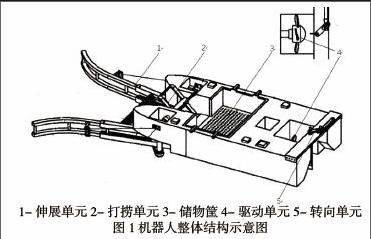
打捞作业要求水面垃圾清扫机器人应具有高效、省时、省力地实现水面漂浮垃圾的清扫的特点。根据需要,本文提出并研制的水面垃圾清扫机器人包括船身以及安装在船身上的储物筐、打捞单元、伸展单元、驱动单元、转向单元和控制单元等,如图1所示。
在打捞作业时,操作者通过控制单元实现对打捞单元、伸展单元、驱动单元和转向单元的控制。打捞单元可将水面垃圾打捞至储物筐内;驱动单元则驱动船身水面运动;转向单元实现船身转向;伸展单元可以在船身移动时,将漂浮物收容于伸展单元内侧,并与打捞单元协同进行打捞工作。
2.水面垃圾清扫机器人各单元的结构设计与功能实现
2.1打捞单元
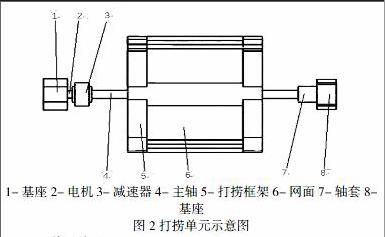
图2所示的打捞单元设有电机、主轴、打捞框架、网面、轴套和基座,基座和电机分别安装在主轴的两端,主轴通过基座和电机安装在船身上,主轴的另一端通过轴套与基座连接,打捞框架安装在主轴外侧,网面固定在打捞框架上。
机器人作业时,打捞网在水中打捞,电机带动主轴旋转,当打捞网下降至水面以下时,将水面垃圾捞起,打捞网离开水面时,电机驱动其翻转,将水面垃圾送至储物筐。
2.2伸展单元
图3所示的伸展单元设有两套伸缩杆装置和两套尾部固定装置。伸缩杆装置采用四杆机构,并对称设置于船体的两侧,两套伸缩杆装置之间设有弹簧,并与船身之间设有与电机连接的滑轮和拉绳。尾部固定装置采用两个固定销和一个长条状固定环套配合的方案,伸缩杆装置架固定在环套上,固定销顶部固定在船体后部的下侧。
伸缩杆的分为主杆部和副杆部,主杆部的两个主杆内设有电动推杆,主杆外设有打捞网;副杆部的两个副杆和支撑轴平行布置在主杆上,副杆上设有打捞网。伸缩杆装置中副杆插入主杆中,电动推杆推动副杆沿主杆内壁滑动。伸展杆不工作时平行紧贴于箱体的外侧,滑轮旋转带动拉绳伸缩,从而拉动两套伸缩杆装置,伸展杆伸出时与箱体成60度夹角。
固定环套两端设有两个固定环,固定环上设有两个固定销,固定销与船身铰接,船身移动时,装置在固定销之间伸展和闭合,伸展杆的上、下杆之间的网面对船体前部的漂浮物进行预收集,漂浮物与船相对运动沿着伸展杆、箱体的前部集中至打捞船的前部中间,进行集中处理。
2.3驱动单元和转向单元
驱动单元采用电机、传动轴和螺旋桨配合的方案,单元两端架设于船身两侧的箱体上,并通过导轨封闭安装,电机固定在船身上,传动轴的两端分别与电机和螺旋桨连接,螺旋桨固定在船身后侧,如图1所示。
转向单元如图4所示,在船身上设有电动伸缩杆和固定片,与摆杆、丝杠螺母机构和叶片相连,转向单元的底部与两侧的箱体上部设有封闭的移动副。
螺旋桨的旋转由电机通过传动轴驱动,实现推动机器人运动;电动伸缩杆的伸缩端固定在连板锁定套上,摆杆中段和连板固定,摆杆的另一端设有丝杠螺母机构,螺母的底部与转向叶片固定连接,电动伸缩杆伸缩带动摆杆,通过丝杠螺母机构传动带动转向叶片的左右摆动,摆杆自转,从而实现航向的变化。
2.4控制单元
控制单元包括若干无线通讯模块,分别为伸展杆无线模块、转向无线模块、打捞无线模块、驱动无线模块,打捞单元、伸展单元、驱动单元、转向单元分别通过无线通讯模块与陆上的控制设备连接,各模块布置在船身各处。
船身前部的右侧设有伸展杆无线模块,可控制伸展杆伸缩并通过距离传感器检测与障碍物距离;船身后部的右侧设有转向无线模块,控制电机转动从而控制叶片摆动;船身前部的左侧设有打捞无线模块,控制打捞电机转动,打捞网从水中将垃圾打捞至储物筐;船身后部的左侧设有驱动无线模块,控制电机转动,带动螺旋桨转动推动机器人前进。
3.水面垃圾清扫机器人的具体作业方式
操作人员在岸边进行全程操作,通过控制驱动无线模块打开电机,驱动螺旋桨前进,并结合转向无线模块的控制进行转向驶至所需的作业区,控制伸展杆无线模块打开电机,兩侧的主杆就会打开,并通过控制主杆上杆内部的电动推杆,将副杆伸出,此时控制打捞无线模块打开电机,打捞单元开始工作,将漂浮物打捞至置物框内,直至将湖面的所有的水面漂浮垃圾清扫干净,最后关闭伸展单元、打捞单元,驶回岸边,再将储物筐提出,将内部的垃圾清扫掉,作业完毕。
参考文献:
[1]李林冬,辛绍杰等.漂浮物打捞船.国家发明专利.ZL 201410398395.5endprint
猜你喜欢
小哥白尼(趣味科学)(2022年4期)2022-06-30
娃娃乐园·综合智能(2022年6期)2022-06-17
趣味(数学)(2021年6期)2021-11-06
疯狂英语·新读写(2021年8期)2021-11-05
少先队活动(2021年5期)2021-07-22
金桥(2019年10期)2019-08-13
大社会(2016年3期)2016-05-04
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
