
多跳水声传感器网络性能分析∗
2017-11-28 01:57田向阳
舰船电子工程 2017年10期
田向阳 刘 漩
(91388部队 湛江 524022)
多跳水声传感器网络性能分析∗
田向阳 刘 漩
(91388部队 湛江 524022)
在多跳水声传感器网络中MAC协议的性能有所抑制,同时由于存在较长的网络传播延时RTS-CTS协议的效能也大大折扣。论文建立了基于竞争的MAC协议模型,用来分析在简单线性拓扑水声传感器网络中Aloha协议的性能。对该模型的评估显示Aloha协议对通信负荷和网络规模都极为敏感。
多跳水声传感器网络;Aloha协议;介质访问控制
1 引言
水声传感器网络受到传输带宽和传播延迟两方面的限制。在网络中,传感器把本身产生的以及来自上级节点的信息发送到网关,然后通过网关把水声传感器网络和外部网络联结起来。用于这种网络的MAC协议必须考虑到其特有的传输模式、带宽限制以及传输延时。传统的RTS-CTS机制即使在跳跃数不多的网络中也是低效的。除非使用巨大的数据帧,否则当网络传输延时极为严重时基于竞争MAC协议也是低效的[1-3]。
水声传感器网络的特性在于网络中的信息倾向于一种特殊的传输模式。因为所有感应器产生的信息都流向网关,所以感应器中的来自于别的节点的信息量和它与网关之间的跳数成反比。这导致信息越靠近网关它产生堵塞的可能性就越大。
在一个多跳拓扑结构中,除了网络信息传输特性外其他的一些因素也使得对MAC协议性能分析变得复杂。这些因素包括半双工传输的特性,信息时间和空间的不同产生传输损耗也不同。这使得对误码率和线路连通性建模变得困难,同时也带来了评估上的限制,比如可靠性和复杂拓扑评估[4]。本文定义了问题空间并且建立一个研究在简单多跳拓扑结构(如图1)中Aloha协议性能的模型。该模型可以扩展到更为复杂的拓扑结构,例如多分枝树形拓扑结构。
该模型提供了一种计算网络预期通信量和任意传感器的帧传到网关的概率的方法。同时也提供了为各种拓扑结构确定合适Aloha协议的有用依据。这个模型的评估表明Aloha协议在简单小负荷水声系统具有适用性。

图1 线性拓扑图
2 问题空间
2.1 目标协议
基于竞争MACMAC协议会限制介质访问控制的性能,所以一个节点接入网络不需要事先和其他节点调试。这些协议大体上分为两类:Aloha协议,这一类协议不考虑介质目前状态,另一类是载波监听多路访问协议(CSMA),这类协议则考虑介质目前状态。为了使CSMA能有效的工作,传感器在它所传输的信息同其他节点的信息发生冲突的情况下必须在某种程度上能决定其正确性。无线介质的本质使得这种检测变得重要起来。在无线电广播频率(RF)范围内这个问题的解决办法是使用一类MAC协议,这类MAC协议通过使用动态访问预留表来避免碰撞,例如著名的RTS-CTS交换。这可以减少却并不能消除冲突[5~7]。
Aloha协议在传输前不考虑介质的状态,这就减少了延迟带来的影响,因此对它的分析相对简单一些。当进行帧的接收时介质的状态处于易于接受的状态是至关重要。只有当该帧需要被同一个传输过程中的多个节点接收时,相关的传播延时才会被考虑进来。因为传播延时会让显著增长节点信息易损期。
2.2 使网络复杂的因素
分析一个应用于多跳水声传感器网络中的基于竞争MACMAC协议性能时有几个因素是必须考虑的。
信息模式和信息流:一个传感器会在不相关的时间随机的或者周期性的生成信息。报告罕见或极端事件使用前一个生成模式,而报告流向监视则使用后一个生成模式。如果信息是随机产生的,那么它到来的过程可以按照泊松分布建模。如果各个传感器产生信息是独立的,那么信息的合成也将是一个泊松分布[8]。如果信息产生是周期性的,那么两个节点之间信息到达时间的不同将会严格取决于节点之间传播延时的不同。也许有人会认为一个节点开始产生信息的时间是一个随机变量。然而,信息产生过程一旦开始,那么除非被外力或者信息产生算法所改变,否则帧的托付周期在此节点的工作期限内将会固定下来。因此,在周期性的信息传输模式中一旦发生了一次冲突,那么接下来的所有和这一来源点相关的帧都会继续冲突下去。
另外一个问题是信息流模式自身的问题。如上所述,在水声传感器网络中所有的信息都流向唯一的目的地即网关。因此,在信息流向网关的过程中将会出现聚集现象。这一现象会增加所有信息生成策略发生冲突的可能性,但在周期性信息生成策略中它会增加一些传感器永久丢失帧的可能性。这说明对于周期性信息生成模式的水声传感器网络来说基于竞争MAC协议也许不是一个好的选择[9]。
可靠性服务要求:很多应用要求信息能确保送达。像这样的可靠性服务需要一直进行帧的缓冲和转发直到收到应答为止。从数学分析上看,缓冲和转发也许推翻了泊松分布关于节点信息传输模式的假设。进一步说来,进行应答接收就增加了一个额外的信息易损期,因此潜在的冲突就增加了。
信道模型:水通道的几个特性使建立清晰的性能模型成为困难。除了上面谈到的传播延时外,人们必须考虑到半双工通信的性质,时间和空间不同导致的信息损耗和单向性联接的可能影响[10]。
在半双工通信中,节点发送信息的优先级比接受信息的优先级要高。也就是说,如果发送信息工作和接受信息工作是同时进行的,或者有一帧到达节点而该节点正在发送信息工作,那么对于帧信息的接收工作就会一直处于失败状态。而在信息发送方面,除非在下级链路该帧同来自其他节点的帧发生冲突,否则对发送工作没有影响。如果帧到达节点时同其他的帧重叠,那么对于该节点来说这些帧就丢失了。然而,既然这些帧的其中之一来源于下级节点(拓扑如图1),那么拓扑对下级节点发出的信息将会比较有利。因为只有当它与来自该节点下级节点的帧发生冲突时该帧才会丢失。
到目前为止我们仅仅讨论了由冲突引起的帧丢失。帧也可能由于传输错误而丢失,这些错误的产生主要是由于信息在信道传输过程中的信息衰减。在水声传感器网络环境中,信息衰减由于时间和空间不同导致了信息损失模式变化很大且复杂,这使得为这些网络传输错误建立一个精确的静态模型成为一个巨大的挑战。
信息损失在时间和空间上的不同可能会导致一些本来应该是全双工的网络变成单工的。网络可能因此被隔离开来了,在这种情况下上级节点部分和网关就处在了隔离状态。在一些典型的拓扑中,这也许不会导致网络的隔离,但是在需要可靠性服务的情况下将会需要通过其他的路径来传回应答信息。
2.3 性能度量
在评价网络性能时通信量和延时是典型的参考值。通信量必须考虑典型的信息流。既然在水声传感器网络中所有的信息都流向网关,那么只有到达网关的信息才反应网络的通信量。信息内容的性质决定了网络特定性能要求。如果信息对时间敏感,那么把信息的延时变为最小就显得重要起来。然而如果信息对时间没有严格要求,那么传输可靠性就比等待时间更为重要了。
因此,有三个参考值对传感器网络的性能有明显的影响:通信量,帧延时和传感器节点发送信息的概率。这三项因素都依赖于每一跳帧的接收成功率[11]。
3 具体分析
作为分析Aloha协议在水声传感器网络适用性的第一步,我们需要建立该协议在一个简单多跳线性拓扑结构中的性能模型。我们假设每个节点的有效传输范围只是到达它临近节点的一跳,并且冲突范围比任何一个两跳临近节点的距离都要近。每一个节点立刻发出它所接受到来自上级临近节点的每一帧[12]。该分析不考虑可靠性服务模式,也不考虑可能出现的捕获效应,如果一个帧和其他帧冲突的话就认为此帧丢失。
3.1 问题方程
传输模式:假设每一个传感器以平均λ帧每秒的速率产生数据的事件是随机的,传感器之间产生信息是独立的。再假设每一个传感器产生的帧都会遵循泊松分布。我们进一步假设所有传感器产生的帧的大小都是恒定的并且速率始终如一,这样帧的传输时间就会是恒定,标记为T。那么每一个传感器的提供负荷(原始帧)就表示为λT。
性能度量:在本文分析中我们注重网络的通信量。同时我们也关注每个节点的帧发送到网关的概率。
既然网络的有效通信量是网关接收到的来自线性链路终点节点的信息量,那么我们在分析通信量的时候必须关注此链路最后一个节点On和网关之间能达到的最大通信量。网络的通信量U(n)来表示,同时它也表示链路最后一个节点的通信量。通信量多少依赖于网关能成功接收来自于On的帧的多少。
Oi+1能否成功接收Oi的帧取决于Oi+1的状态,是空闲的,正在查看它的下游临近节点Oi+2发送的帧,还是自己本身正在发送帧。这些制约条件都是独立存在的。Oi的传送成功率Pi就是Oi+1的帧接收成功率,可写作如下表达:
Pi=Pr{Oi+1节点成功接收帧数|Oi节点传送的帧数}
问题现在就变为导出各个Pi并把它们和网关的信息量联系起来。一旦获得了这些数据,那么Oi的帧到达网关的概率就是。同时这也是所有下级节点能成功接收此帧的概率。由此,帧的端到端延时可以通过帧成功穿过网络的概率,累积传输量以及它到网关的传播延时推导出来。
3.2 得到Pi和U(n)的方法
因为一个节点在发送信息前并不考虑在它一跳范围内的临近节点是否正在进行信息接收工作,因此当临近节点正在进行帧接收工作时,信息易损期就变为发送时间的两倍,也就是2T。为了得到Oi+1的接收成功率,我们必须确定所有可能的冲突源。我们假设冲突范围比任意一个两跳临近节点对之间的距离都要近。只有距离接收节点一跳的距离的相关节点产生的信息才必须被考虑进来,如图2。因此,我们必须确定冲突节点集合Ci={Oi+Oi+1+Oi+2}中的所有节点发送信息概率,这样它能在接收相关帧的任意时间内到达它的接收点。
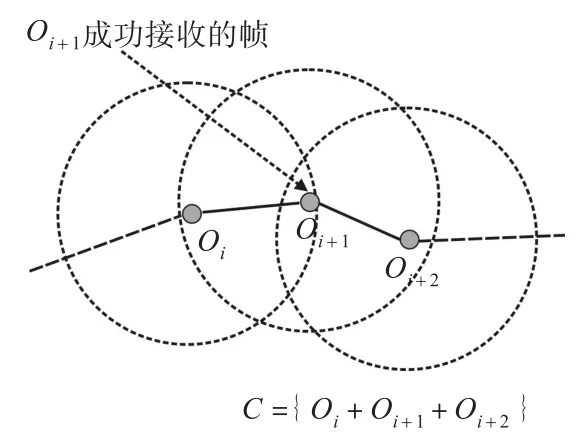
图2 冲突节点集
假设每一个节点以速率λ生成的帧信息是独立的,完全分布式的,同时节点间在产生帧的时候是独立的,节点Oj聚集的信息量可以以泊松分布建立模型。我们用λj表示节点Oj聚集的信息量。在一个帧信息易损期内Oj没有信息产生的概率是:

假设每一个节点以相同的速率产生帧,我们分别得到:
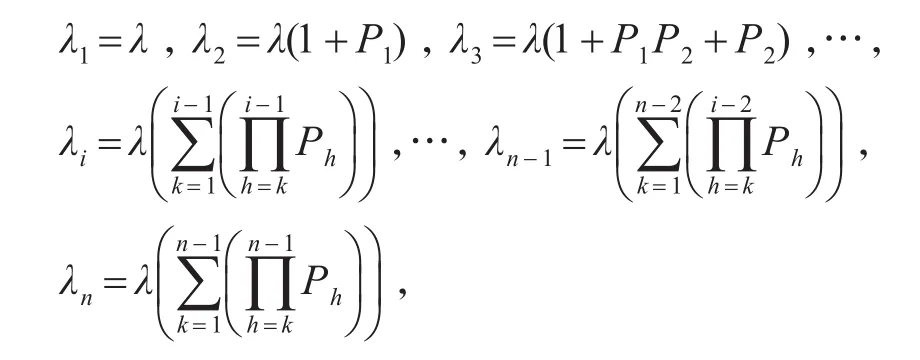
由此,我们得到

O1的成功传输率和相应的O2的接收成功率都依赖于冲突节点集合C1。该概率是

式(3)反映在一个信息易损期,只有在没有O1或O3的其他帧到达O2,并且O2没有进行传输以致链路堵塞的情况下,O1的帧才会被成功接收。一般来说Oi的帧被成功接收的概率取决于Ci如下所示。
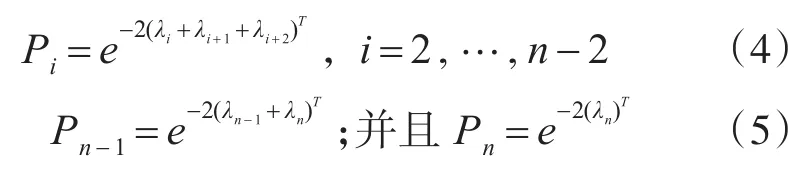
结合式(2),(4)和(5)我们得到关于 n个变量λ1,λ2,...,λn的 n 个非线性方程。用 Ui表示 Oi到Oi+1的链路通信量,那么,Ui=λn⋅Pn⋅T 。该网络的通信量可以简单表示为

每一次向网关的继续跳跃都会导致节点负荷增加,直到不能支持更多的负荷为止,在这种情况下,每产生一帧新信息都会导致至少另外一帧信息在一个或者更多的冲突节点集中由于冲突而丢失。因此,每多一次跳跃节点的成功接收率就会随之减少。然而线性链路的最后两个节点除外,因为它们的冲突节点集较小。两个相邻节点的接收成功率之比如下。
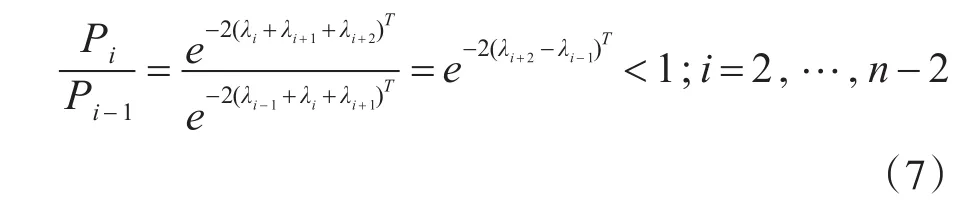
因此,每个节点可以承受的聚集负荷随着网络规模的增长会呈指数减少。这样在给定信息产生速率λ后,根据它们之间相互依靠关系可以迭代得出 λi和 P1,P2,…,Pi的值。
水声传感器网络的有效通信量或者说网络有用通信量用S(n)表示,其表达如下

在等式中L表示以字节单位的数据帧的平均大小,α表示网关收到的每一个数据帧中数据部分的平均比值。
4 性能评估
在得到线性链路中信息负荷值和传感器数量后,通过解决式(2)给出的n个非线性方程,我们可以得到每一个节点的聚集信息负荷。这也可以通过解决下面这个最简化的问题来得到。

等 式 中 Λ=(λ1,λ2,…,λn) , Fi(Λ)=,在后一个等式中Ph是Λ的函数。
得到每一个 λi值就可以直接计算出 Pi和U(n)。接下来我们给出不同网络大小n值时相应的传感器平均负荷λ⋅T。

图3 在不同的线性规模下节点信息负荷(λi)和节点号(i)所成的曲线关系
不失一般性,我们把T值设定为1。我们让传感器的平均负荷在λ=0.002,0.01,0.1或者0.5的范围内变化。图3显示每一个节点在不同的线性网络大小n值时的聚集信息量(λi,i=1,…,n)。当负荷小的时候(λ=0.002,0.01,0.1),λi值随着 i的增加而增加,而和n值无关。这点符合我们的直觉,因为每一个节点都需要把接收到的来自上游节点的帧发往下游。当负荷增加的时候,这种趋势就变弱了。最终,当λ=0.5的时候λi几乎已经变成一个和i无关的定值。这是因为,当每个节点的信息负荷越来越多后,冲突会越来越多,最终会慢慢达到饱和状态。
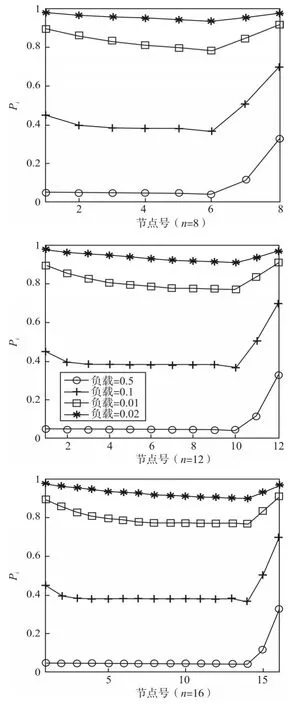
图4 在线性拓扑规模为(n)时Pi和节点号(i)的曲线图
那么我们期望,由于每个节点信息量的增加,Pi会随着i的增大而减少。图4显示无论选择多大的线性结构值,除最后两个节点由于较小的冲突节点集外,Pi均会随i的增大而减小。当负荷超过λ=0.5每个节点都达到它的饱和状态,Pi变得平滑。
图5显示当传感器的平均负荷非常小时,网络的通信量会随n值的增大而增大。我们预计只要节点没有到达它们的饱和状态,随着线性网络规模的变大越来越多的帧可以到达网关。我们也预计当线性网络规模变大时,靠近网关的节点将逐渐变得饱和。那么网关饱和后通信量将不再增加了。当λ=0.01的时候我们可以观察到上述这一点。而当λ=0.1或0.5的时候所有的节点都饱和了,或者说几乎饱和了,那么无论线性网络规模是多大,通信量的曲线也是平缓的。

图5 不同负载(λ)下通信量和节点数所成的曲线
图6显示网络在一个给定的线性网络规模为8的情况下通信量和负荷的关系曲线。最初,当传感器的平均负荷增加,但节点还没有到达它们的饱和状态时,越来越多的帧到达最后节点,最后到达网关。然而,当负荷超过一定的极限后,大量冲突就开始出现,这会致使到达网关的帧的总数减少。总结起来图6显示的内容如下:通信量最先随着负荷的增加而增加。当负荷大约是0.5的时候它到达最大点,然后它就由于大量的冲突开始减少。这也就是Aloha协议在单跳网络应用中的典型特征。

图6 通信量和负载(λ)曲线图
5 结语
本文给出了我们研究的初始结果。此项研究最终目的是建立水声传感器网络环境下基于冲突MAC协议的性能分析模型。本文确定了使分析这些协议变得复杂的因素。而后本文给出了不提供可靠性服务的简单Aloha协议的分析模型。虽然该模型做了几个简单的假设,但依然可以从该模型在线性拓扑中的评估得出几个重要结论。值得注意的是,在节点的数量或者平均传感器负荷增加的情况下,这样的网络可能会到达饱和状态,因此我们必须注意它们的应用,以确保传感器数据能够到达网关。除极小的负荷外,饱和状态会在少于五跳,或者最大负荷状态下三跳以内出现。一旦网络出现饱和,上级节点的帧到达网关的可能性就非常小了。
Aloha协议性能的限制性因素是冲突。避免冲突的目的就是为了优化这类协议。为了了解这些优化措施在水声传感器网络环境下的作用,对这个模型进一步的分析和优化就显得有必要了。
[1]郑君杰,马金钢,徐世林.海洋水声传感器网络路由机制研究[J].海洋技术学报,2014,26(6):57-59.
[2]李莉,杨丽娟,李 刚,赵 静.基于Aqua-Sim的水声传感网络MAC层协议分析[J].传感器与微系统,2015,18(5):78-90.
[3]赵静,李瑞芳,李莉刚.基于NS2的水声传感网络MAC层协议分析[J].沈阳化工大学学报,2015,20(1):185-188.
[4]徐明,刘广钟.三位水声传感器网络中高效路由协议的研究[J].计算机科学,2012,32(10):67-70.
[5]王彪,陈艳.水声传感器网络的评估实验方法研究[J].实验科学与技术,2013,24(12):69-91.
[6]刘敏,惠丽,杨力.水声传感器网络及其在海洋监测中的应用研究[J].山东科学,2010,45(4):23-25.
[7]黎作鹏,蔡绍斌,张菁.水声传感器网络节点定位技术综述[J].小型微型计算机系统,2012,78(3):90-92.
[8]郭立本,张明,高军.基于分簇的水声传感器网络多跳路由算法[J].计算机与现代化,2011,70(5):56-57.
[9]安寅,黄涛威,陈棣湘.便携式水声传感器测试系统的设计与实现[J].中国测试,2015,67(5):123-126.
[10]任超群,徐明.基于簇的水声传感器网络的安全认证协议[J].计算机科学,2016,56(10):147-149.
[11]刘胤祥,姜卫东,郭勇.水声传感器网络节点自适应加权定位算法[J].传感器世界,2014,77(6):16-18.
[12]张鸿彦,王克甫.水声传感器中数据流突发判断方法研究仿真[J].计算机仿真,2014,89(7):28-30.
Analyzing the Performance of Multi-hop Underwater Acoustic Sensor Networks
TIAN Xiangyang LIU Xuan
(No.91388 Troops of PLA,Zhanjiang 524022)
In Multi-hop underwater acoustic sensor networks the performance of medium access control protocols is constrained and the RTS-CTS protocol is degraded due to long propagation delays of such networks.In this paper,we present a model of contention-based medium access control protocols to analyze Aloha variants performance in a simple string topology.An application of the model suggests that Aloha variants are vary sensitive to traffic loads and network size.
multi-hop underwater acoustic sensor network,Aloha protocols,medium access control
TN925
10.3969∕j.issn.1672-9730.2017.10.030
Class Number TN925
2017年5月13日,
2017年6月17日
田向阳,男,助理工程师,研究方向:通信技术。刘漩,女,助理工程师,研究方向:时统技术、微波传输技术。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
纺织标准与质量(2022年2期)2022-07-12
煤气与热力(2022年4期)2022-05-23
计算机应用文摘·触控(2022年6期)2022-04-15
电子制作(2021年4期)2021-06-16
长江大学学报(自科版)(2021年6期)2021-02-16
计算机应用(2018年9期)2018-10-16
宇航计测技术(2018年3期)2018-09-08
电子制作(2017年19期)2017-02-02
