
Start-up current adaptive control for sensorless high-speed brushless DC motors based on inverse system method and internal mode controller
2017-11-21 12:54:22HeYnzhoZhengShiqingFngJincheng
CHINESE JOURNAL OF AERONAUTICS 2017年1期
He Ynzho,Zheng Shiqing,*,Fng Jincheng
aSchool of Instrumentation Science and Opto-electronics Engineering,Beihang University,Beijing 100083,China
bBeijing Engineering Research Center of High-Speed Magnetically Suspended Motor Technology and Application,Beijing 100083,China
Start-up current adaptive control for sensorless high-speed brushless DC motors based on inverse system method and internal mode controller
He Yanzhaoa,b,Zheng Shiqianga,b,*,Fang Jianchenga
aSchool of Instrumentation Science and Opto-electronics Engineering,Beihang University,Beijing 100083,China
bBeijing Engineering Research Center of High-Speed Magnetically Suspended Motor Technology and Application,Beijing 100083,China
Adaptive control;Brushless DC motors;Inverse systems;Internal model controller;Neural networks;Start-up;Support vector machines
The start-up current control of the high-speed brushless DC(HS-BLDC)motor is a challenging research topic.To effectively control the start-up current of the sensorless HS-BLDC motor,an adaptive control method is proposed based on the adaptive neural network(ANN)inverse system and the two degrees of freedom(2-DOF)internal model controller(IMC).The HS-BLDC motor is identified by the online least squares support vector machine(OLS-SVM)algorithm to regulate the ANN inverse controller parameters in real time.A pseudo linear system is developed by introducing the constructed real-time inverse system into the original HS-BLDC motor system.Based on the characteristics of the pseudo linear system,an extra closed-loop feedback control strategy based on the 2-DOF IMC is proposed to improve the transient response performance and enhance the stability of the control system.The simulation and experimental results show that the proposed control method is effective and perfect start-up current tracking performance is achieved.
1.Introduction
The high-speed brushless DC(HS-BLDC)motor has been used extensively in pumps,blowers,compressors and control moment gyroscopes due several distinct advantages offered in areas such as power density,efficiency,and magnetic bearing system.1–5To ensure that the motor can be operated in high-speed environments and reduce the hardware circuit cost,an investigation into sensorless control is essential for further development of HS-BLDC motor drive systems.6,7Extremely small stator inductance and resistance characteristics are not conducive to controlling the start-up current of sensorless HS-BLDC motors.6,8Consequently,sensorless HS-BLDC motor start-up current control is a challenging research topic.Highly precise start-up current control without a large ripple is required in the motor drive system.6,8Without this,a largestart-up current is harmful for the power circuit and motor,8–10and can even cause motor start-up failure.10Recently,a common commutation instant detector based on back electromotive force(BEMF)zero crossing point(ZCP)detection has been utilized,11,12the improved BEMF integration method13and BEMF change rate calculation14were proposed for the sensorless motor control.However,BEMF information is too small to detect the ZCP information until the motor accelerates to a certain motor speed.11–15To overcome the problem,a special start-up technique is required.The current frequency(I/f)limit control strategy1,10and the optimized voltage frequency(V/f)scale digital control strategy15–17are used to start and accelerate the motor.These conventional methods usually work well,but are used under a specific set of known model parameters.
Considering that the motor is a multivariable and strong coupling nonlinear system,the force of the high-speed motor start-up current control was decoupled and linearized from the original motor drive system.18As a kind of direct analysis feedback linearization method,the inverse system theory has focused on constructing the inversion of the original system,and then linearizing and decoupling the original system by cascading with it.18–23The artificial neural network(ANN)has strong learning capabilities and good approximation performance for nonlinear functions,and the ANN αth-order inversesystem method wasproposed to approximately decouple the controlled multi-input multi-output(MIMO)nonlinear system into a number of independent single input single output(SISO)linear subsystems.19–21The neural network mode was utilized to construct the inverse model,and a feed-forward controller based on the ANN inverse method was proposed for arm control.19An improved neural network inverse model was utilized in a feedback control.20A speed observation scheme using the ANN inverse method was proposed for the bearing-less induction motor.21Technically,the built inverse model parameters should be adaptively adjusted by the real-time model identifier so as to construct an optimal pseudo linear system.Meanwhile,the support vector machine(SVM)theory can provide an effective method for pattern recognition,22system identification24and control25based on statistical theory and the minimizing structural risk principle.In Ref.24,nonlinear modeling for the precise motor motion control was achieved based on the least squares support vector machine(LS-SVM).A SVM based controller was proposed to control the nonlinear plant.25A more accurate model and perfect control performance may be achieved if the SVM parameters are updated in real time.Therefore,the HS-BLDC motor system identifier based on the online least squares support vector machine(OLS-SVM)could be utilized to adapt the parameters of the constructed inverse system.Admittedly,for the complexity of this HS-BLDC motor system,high performance startup current control is hard to achieve by only using the inverse system theory.An extra controller is expected in combination with the developed inverse system control method so as to enhance control performance.18,26–28Nowadays,many advanced control techniques,such as,internal model control,18,26predictive control,27and particle swarm optimization,28are used to improve the robustness of the control system.The two degrees of freedom(2-DOF)internal model control(IMC)method can achieve tracking and disturbance rejection performance in a completely independent way.29–34
The objective of this paper is to achieve a start-up current adaptive control for the sensorless HS-BLDC motor based on the proposed ANN inverse and OLS-SVM identifier.The HS-BLDC motor drive system is identified by the OLS-SVM algorithm,and the adaptive ANN inverse controller parameters are tuned in real time by the system identifier.Considering the transient response performance in parameter regulating process,a 2-DOF IMC is utilized to design the extra controller so as to improve control performance in the initial stage.
The paper is organized as follows.In Section 2,the HSBLDC motor system model is described and its invertibility is analyzed.The HS-BLDC motor system identifier based on the OLS-SVM algorithm is introduced in Section 3.The novel parameter adaptive ANN inverse controller and the 2-DOF IMC scheme are designed in Section 4.The tracking control simulation and experimental results are reported in Section 5.Finally,conclusions are drawn in Section 6.
2.Invertibility analysis of HS-BLDC motor
For the magnetic bearing suspended HS-BLDC motor,7the damping coefficient is ignored.8,12,26,35The mathematical model can be represented as the following equations:
whereUa,UbandUcare the terminal voltages;ia,ibandicare the phase currents;Ea,EbandEcare the BEMFs;Rsis the phase resistance;Lis the phase inductance;Mis the mutual inductance;TLis the load torque;ω is the rotor electrical angular speed;Jis the motor rotating inertia;Unis the neutral voltage.
Phase current and speed are chosen as the state variables,then x=[x1,x2,x3]T=[ia,ib,ω]T.The system output variables are y=[y1,y2]T=[ia,ω]T,and the control variables are u=[u1,u2,u3]T=[Ua,Ub,Uc]T.Consequently,Eq.(1)can be rewritten as
According to the inverse system theory,output variables are differentiated until the derivatives visibly contain input u.The reversibility of the original system is analyzed byn-order differential expressions of the system output variable:
A quasi current source inverter based on the DC/DC bucktype power converter was used in the HS-BLDC motor drive system.36The input dc-link voltageUdcand the cycle duty ρ are utilized to support the power of the inverter.Under the traditional six-step square wave control method,the self-defined control variable u mentioned earlier can be rewritten as a function ofUdc,ρ and BEMFs.Take b-phase,for example,the derivatives in Eqs.(3)and(5)can be rewritten as
According to Eqs.(6)and(7),the two-order derivative of the output clearly contains the input.The relative order of the system is α ={α1,α2}={1,2}.Thus,the order of the systemn= α1+ α2=3,i.e.,the system is reversible.A generalized inverse system exists and can be given as
wherea10,a11,a20,a21anda22are the coefficients.The integrator pseudo linear system can be built by cascading the αth-order inverse system with the original HS-BLDC motor system.The simplest first-order system and an optimal second-order system were built,and pseudo linear subsystems constructed.Control performance research of the rotor electrical angular speed ω was carried out simultaneously,but is not introduced in detail.For start-up current tracking control,the obtained simplest first-order pseudo linear subsystem is constructed in Eq.(10)by choosing coefficients.
The built first-order pseudo linear system is convenient for extra controller design,but the inverse system should be updated in real time for pseudo linear system correction.To accomplishreal-timeupdates,anHS-BLDCmotorsystemidentifier based on the OLS-SVM is proposed in the next section.
3.OLS-SVM based HS-BLDC motor system identifier
The SVM has been successfully applied in system modeling for its high generalizability and global optimization properties since it was proposed by Vapnik.37OLS-SVM is introduced and described as a modified algorithm of a standard SVM in this section and utilized to identify the HS-BLDC motor model.
The LS-SVM adopts the least squares loss function and equality constraints.Analytical solutions can be obtained by solving the linear equations.The traditional LS-SVM is an offline algorithm,and the HS-BLDC motor system model cannot be updated continuously for model correction.Suggested solutions to this problem come from classification learning algorithms,38SVM training,39system identification algorithms,40and reliable observation model realization.41Here the OLSSVM based on a rectangular window algorithm is utilized.
For the given training dataset,the LS-SVM model for nonlinear function estimation can be represented as37
whereCis a regularization factor;Ω is the kernel function matrix.The Mercer condition has been applied here,and the radial basis function(RBF)kernel is written as
where σ is the RBF kernel width.
According to the rectangular window algorithm,the forgotten factor β and a big enough real ζ are introduced.The weight vector of the OLS-SVM can be regulated by the online recursion function.40Considering the multi-input-single-output(MISO)mapping of the OLS-SVM,the duty and phase currents are constructed in a high-dimensional space by the following:
The phase current model based on the OLS-SVM can be written accordingly as
With the obtained inverse system model parameters ξiandb,the inverse model is obtained by Eq.(11).
Inductively,the procedure of the proposed HS-BLDC motor system identifier based on the OLS-SVM is given in Fig.1.
4.Controller design
For the sensorless HS-BLDC motor start-up current control,an ANN inverse system is utilized.The inverse system parameters are regulated in real time by the OLS-SVM system identifier.To achieve excellent tracking performance and disturbance rejection performance independently,a 2-DOF IMC is investigated as the extra controller to construct closeloop control in this section.
4.1.Adaptive inverse controller design
A diagram of the adaptive inverse control based on ANN and the OLS-SVM system identifier is shown in Fig.2.The control objective is to make the system outputiktrack the desired signalrkwith the adaptive controller;eis the error of system output and identifier output.
A single neuron network controller is utilized as the inverse controller.With the network weight W and input R,the adaptive controller can be expressed with the hyperbolic tangent function:
In the start-up current control scheme,the system tracking error is defined asek=rk–ik.A square function is used as the tracking error performance index function θk.
The model output phase current based on the OLS-SVM is utilized to regulate the ANN inverse controller parameters in real time.According to Eqs.(11)and(13),the HS-BLDC motor model output phase current is obtained as
According to the least-square algorithm,neuron weights can be updated by minimizing the tracking error performance index Θkas follows:.
where μ is the learning rate.For thejth controller,weightwj(j=1,2,...,t)can be updated adaptively according to the steepest descent algorithm and the initial weightw0.The phase current model output is utilized to calculate an approximation for the gradient information.
With Eqs.(19)and(20),the ANN controller weights will be regulated and updated.
A flow diagram of the overall ANN inverse controller parameter real-time regulation based on the OLS-SVM model identification information is presented in Fig.3.
By regulating the adaptive parameters,an adaptive inverse system is built based on the ANN inverse model and the OLSSVM system identifier.A pseudo linear subsystem is constructed as shown in Fig.4,wherevk,ukandykare the input variable,control variable and output variable,respectively.
4.2.Extra 2-DOF IMC design
Since the developed pseudo linear system is an open-loop system,the 2-DOF IMC is utilized as an extra controller to improve transient response performance and enhance control system stability.The HS-BLDC motor current closed-loop control structure is shown in Fig.5,whereGp(s)is the pseudo linear system;^Gp(s)is the internal model;Q1(s)andQ2(s)constitute the IMC;i*kis the current reference input;anddkis the disturbance input.
According to Fig.5,the current output is derived as
Given^Gp(s)=Gp(s),Eq.(22)can be rewritten for the exact model
From Eq.(23),it can be seen that the internal model control system is closed-loop stable.Q1(s)is mainly used to adjust the system tracking performance whileQ2(s)is mainly related to the disturbance rejection performance.According to IMC design principles,the I-type simplest low-pass filtersF1(s)andF2(s)are introduced separately intoQ1(s)andQ2(s).

Hence,the equivalent structure of Fig.5 is a 2-DOF controller as shown in Fig.6.
The control performance for tracking and disturbance rejection can be controlled by the parameters λ1and λ2,respectively,and robustness can be improved by regulating the parameter λ2.Assuming the model is exact anddk(s)is zero,the error transfer function is achieved according to the control structure in Fig.6.
The tracking performance is related to the parameter λ1only.TheE1(s)converges toward a small neighborhood around zero if λ1is small enough,i.e.,the feedback control system is stable.
Similarly,the error transfer function of the disturbance rejection is given by

By introducing the above described 2-DOF IMC into the developed pseudo linear subsystem as an extra controller,a diagram of the proposed control strategy of HS-BLDC motor start-up current control can created,as shown in Fig.7.
5.Simulation and experimental validation
In order to demonstrate the effectiveness and superiority of the proposed adaptive control strategy,simulation and experiments have been developed,and testing of a magnetic bearing suspended HS-BLDC motor is considered.
5.1.Simulation and experimental setup
The motor start-up current control simulation based on MATLAB(R2011a)/Simulink was carried out according to Fig.7.In the experiment,a test motor is driven by a digital signal processor (DSP) based voltage source inverter.TMS320F28335 is a 32-bit float point DSP produced by Texas Instruments(TI).The proposed algorithm is realized by software that is operated by the DSP chip.The power inverter circuit is mainly constructed by an Infineon STACK module(6PS18012E4FG35689),which contains the necessary components for the current,voltage and temperature measurements.DC filtering metallized film capacitors are utilized for the inverter DC-link smooth filtering circuit.All test parameters for the magnetic bearing suspended HS-BLDC motor,OLSSVM identifier,ANN inverse controller and 2-DOF IMC are given in Tables 1 and 2.
5.2.Simulation verification
In the simulation,comparative studies between ANN inverse controller only and the complete controller are carried out.Furthermore,tracking control is performed at different load conditions.
First,the start-up current tracking control simulation based on ANN inverse controller only is carried out.The motor rotational speed response,phase current response and current tracking error ratio under the rated load are shown in Fig.8.The measured(red dot dash line)and desired(blue solid line)phase current responses at the start-up stage are shown in detail.
Owing to the existence of the optimization process and the non-optimal controller parameters in the beginning stage,the tracking curve shows that tracking capability is poor in the initial stage.By introducing the extra feedback controller,the proposed controller is utilized and validated with the same simulation conditions mentioned earlier;the simulation results are shown in Fig.9.
The maximum current tracking error ratio is 0.5123 with the ANN inverse controller only and 0.1194 with the complete controller.Start-up speed is smoother in Fig.9 compared with Fig.8.Obviously,the control drawbacks brought by the parameter optimization process are overcome by the proposed control strategy.
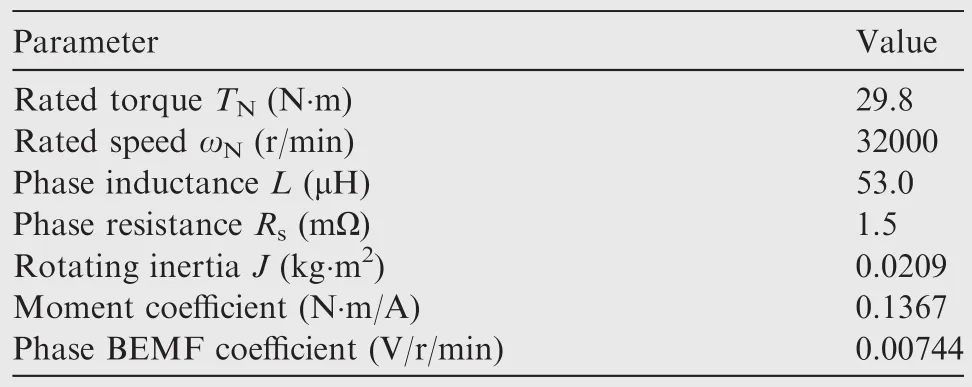
Table 1 Parameters of HS-BLDC motor.

Table 2 Parameters of OLS-SVM identifier,ANN inverse controller and 2-DOF IMC.
In order to further verify the control performance of the proposed control strategy,the start-up current control verification at different load conditions are carried out in simulations.Normally,the HS-BLDC motor is used in a vane load,such as pump,blower and compressor loads.Fig.10 shows the startup current at no load condition and vane load condition with the proposed control strategy.
With the proposed controller,the measured phase current adapts well to track the desired phase current,and stable start-up at different load conditions is accomplished.According to Fig.10,it is clear that the proposed start-up current control strategy has little phase current ripple and is robust under different load conditions.
5.3.Experimental verification
The experimental platform consisting of the test magnetic bearing suspended HS-BLDC motor components,vane load,power inverter circuits,and DSP control board is shown in Fig.11.The experiment for vane load HS-BLDC Motor start-up current control is carried out in this section.The common start-up of sensorless control methods has 3 steps,which include typical force synchronization and acceleration operations.In the experiment,a comparative study on the two aspects of current spike amplitude and harmonic content are researched.
Large-range phase current and current harmonics are caused by the conventional open-loop 3-step method.The large phase current ripple is shown in Fig.12,and the FFT analysis of the measured phase current harmonics is shown in Fig.13.The fundamental component accounts for only 27.4%.The large start-up current and harmonics are harmful to hardware circuits and the motor.
The motor rotational speed,start-up current(blue dashed line is the desired current;red solid line is the measured current),current tracking error and load torque in detailed responses under the vane load condition shown in Fig.14.Figs.9,10 and 14 demonstrate that perfect current tracking performance is achieved during simulation and experimental verification with the proposed control strategy.
The FFT analysis of the above measured start-up phase current harmonics under vane load conditions is shown in Fig.15.The most prominent harmonic is the 5th,whose normalized root mean square(RMS)value is decreased to approximately 7.5%and is negligible.The fundamental component accounts for up to 55.2%.Compared with the analysis in Fig.13,the harmonic content is greatly reduced by the proposed method,and small harmonic losses can be achieved.
In order to further verify the control performance for tracking,disturbance rejection and robustness for the proposed control method,a sudden load impact is imposed on the system.Under the rated load stable condition,and at 2 s,the 3-N·m load impact is applied suddenly,which lasts for 0.2 s.The motor response results with different values of λ1and λ2for the proposed controller are performed in Fig.16.
The decrease in the filter time constant can decrease overshoot and response time simultaneously.Concretely speaking,all the transient conditions are convergent,but with different time adjustment,as shown in the red ovals.The tracking performance is enhanced through decreasing λ1from 1 × 10-3to 1×10-4,as shown in Fig.16(a),but the disturbance rejection waveforms are almost the same,as seen in the red rectangles.Similarly,the disturbance rejection performance is improved with a smaller λ2without any impact on tracking performance,as shown in Fig.16(b).
The simulation and experimental results clearly show that the proposed control method is effective,and perfect control performance of the sensorless HS-BLDC motor start-up current is achieved.
6.Conclusions
(1)An adaptive controlstrategy for the sensorless HS-BLDC motor start-up current was proposed based on the ANN inverse system and the 2-DOF IMC.A pseudo linear system was developed by the ANN inverse system method and the OLS-SVM algorithm.The 2-DOF IMC is utilized as an extra feedback controller for the developed pseudo linear system.
(2)The start-up current tracking error is limited by the proposed controller. Performance for fast tracking response,disturbance rejection and robustness are verified,and the parameter value adjustment of the extra feedback controller is simpli fied.
(3)The HS-BLDC motor is usually used in a vane load,and the experiment is performed and compared with the traditional force start-up method.The large-range current ripple and high current harmonics are greatly reduced by the proposed control method.
Acknowledgement
This study was co-supported by the National Major Project for the Development and Application of Scientific Instrument Equipment of China(No.2012YQ040235).
1.Morimoto M,Aiba K,Sakurai T,Hoshino A,Fujiwara M.Position sensorless starting of super high-speed PM generator for micro gas turbine.IEEE Trans Ind Electron2006;53(2):415–20.
2.Cheng M,Hua W,Zhang J,Zhao W.Overview of statorpermanent magnet brushless machines.IEEE Trans Ind Electron2011;58(11):5087–101.
3.Cao R,Mi C,Cheng M.Quantitative comparison of fluxswitching permanent-magnet motors with interior permanent magnet motor for EV,HEV,and HEV applications.IEEE Trans Magn2012;48(8):2374–84.
4.Fang JC,Zheng SQ,Han BC.AMB vibration control for structural resonance of double-gimbal control moment gyro with high-speed magnetically suspended rotor.IEEE/ASME Trans Mechatronics2013;18(1):32–43.
5.Zheng SQ,Li HT,Han BC,Yang JY.Power consumpti on reduction for magnetic bearing systems during torque output of control moment gyros.IEEE Trans Power Electron;http://dx.doi.org/10.1109/TPEL.2016.2608660;Forthcoming.
6.Rho MS,Kim SY.Development of robust starting system using sensorless vector drive for a microturbine.IEEE Trans Ind Electron2010;57(3):1063–73.
7.Zheng SQ,Han BC,Guo L.Composite hierarchical antidisturbance control for magnetic bearing system subject to multiple externaldisturbances.IEEETransIndElectron2014;61(12):7004–12.
8.Fang JC,Li WZ,Li HT.Self-compensation of the commutation angle based on dc-link current for high-speed brushless dc motor with low inductance.IEEETrans PowerElectron2014;29(1):428–39.
9.Zwyssig C,Round SD,Kolar JW.An ultrahigh-speed,low power electricaldrive system.IEEETransIndElectron2008;55(2):577–85.
10.Kan KS,Tzou YY.Adaptive soft starting method with current limit strategy for sensorless BLDC motors.Proceedings of IEEE international symposium on industrial electronics(ISIE).2012 May 28-31;Hangzhou,China.Piscataway(NJ):IEEE Press;2012.p.605–10.
11.Kim TY,Lyou J.Commutation instant detector for sensorless drive of BLDC motor.Electron Lett2011;47(23):1601–7.
12.Cui CJ,Liu G,Wang K,Song XD.Sensorless drive for high-speed brushless dc motor based on the virtual neutral voltage.IEEE Trans Power Electron2015;30(6):3275–85.
13.Wang DF,Qi J,Zhu C,Liao JM,Yuan YC.Strategy of starting sensorless BLDCM with inductance method and EMF integration.Math Problems Eng2013;2013(5):1–8.
14.Kim JH,Kim SK,Lim J.Commutation point estimation for sensorless brushless dc motor using back electromagnetic force change rate by least square method.Electron Lett2015;51(1):31–3.
15.Chun TW,Tran QV,Lee HH,Kim HG.Sensorless control of BLDC motor drive for an automotive fuel pump using a hysteresis comparator.IEEE Trans Power Electron2014;29(3):1382–91.
16.Zhao L,Ham CH,Han Q,Wu XT,Zheng L,Sundaram KB,et al.Design of optimal digital controller for stable super-high-speed permanent-magnet synchronous motor.IEE Proc Electric Power Appl2006;153(2):213–8.
17.Wu Z,Lyu H.Terminal-voltage-based starting strategy for brushless dc motors without position sensors.Electron Lett2014;50(14):990–2.
18.Liu GH,Chen LL,Zhao WX,Jiang Y,Qu L.Internal model control of permanent magnert synchronous motor using support vector machine generalized inverse.IEEE Trans Ind Informat2013;9(2):890–9.
19.Blana D,Kirsch RF,Chadwick EK.Combined feedforward and feedback control of a redundant,nonlinear,dynamic musculoskeletal system.Med Biol Eng Comput2009;47(5):533–42.
20.Waegeman T,Wyffels F,Schrauwen B.Feedback control by online learning an inverse model.IEEE Trans Neural Netw Learn Syst2012;23(10):1637–48.
21.Sun XD,Chen L,Yang ZB,Zhu HQ.Speed-sensorless vector control of a bearingless induction motor with artificial neural network inverse speed observer.IEEE Trans Mech2013;18(4):1357–66.
22.Ernesto VS,Jaime GG,Jose´Carlos GR,Jose´Fernando DH.A new method for sensorless estimation of the speed and position in brushless dc motors using support vector machines.IEEE Trans Ind Electron2012;59(3):1397–408.
23.Liu ZL,Zheng EH,Sun J,Le C.Decoupling control based on support machines αth-order inversion for the boiler-turbine coordinate systems.Proceedings of the Chinese control and decision conference(CCDC 2011).2011 May 21-23;Mianyang,China.Piscataway(NJ):IEEE Press;2011.p.2620–3.
24.Huang SD,Cao GZ,He ZY,Pan JF,Duan JA,Qian QQ.Nonlinear modeling of the inverse force function for the planar switched reluctance motor using sparse least squares support vector machines.IEEE Trans Ind Informat2015;11(3):591–600.
25.Gedikpinar M.The speed control of dc motors with support vector machine.Electrical Rev2011;87(5):269–71.
26.Fang JC,Ren Y.High-precision control for a single-gimbal magnetically suspended control moment gyro based on inverse system method.IEEE Trans Ind Electron2011;58(9):4331–42.
27.Chen Y,Liu TH,Hsiao CF,Lin CK.Implementation of adaptive inverse controller for an interior permanent magnet synchronous motor adjustable speed drive system based on predictive current control.IET Electr Power Appl2015;9(1):60–70.
28.Sun XD,Zhu HQ,Yang ZB.Nonlinear modeling of flux linkage for a bearingless permanent magnet synchronous motor with modified particle swarm optimization and least squares support vector machines.J Comput Theoretical Nanosci2013;10(2):412–8.
29.Chou MC,Liaw CM.Development of robust current 2-DOF controllers for a permanent magnet synchronous motor drive with reaction wheelload.IEEETransPowerElectron2009;24(5):1304–20.
30.Rupp D,Guzzella L.Iterative tuning of internal mode controllers with application to air/fuel ratio control.IEEE Trans Control Syst Technol2010;18(1):177–84.
31.Gillella PK,Song XY,Sun ZX.Time-varying internal modelbased control of a camless engine value actuation system.IEEE Trans Control Syst Technol2014;22(4):1498–510.
32.Mehrdad Y,Ali MS.Internal model-based current control of the RL filter-based voltage-sourced converter.IEEE Trans Energy Convers2014;29(4):873–81.
33.Qiu Z,Santillo M,Jankovic M,Sun J.Composite adaptive internal model control and its application to boost pressure control of a turbocharged gasoline engine.IEEE Trans Control Syst Technol2015;23(6):2306–15.
34.Khoshnevisan L,Salmasi FR.Adaptive rate-based congestion control with weighted fairness through multi-loop gradient projection internal model controller.IET Control Theory Appl2015;9(18):2641–7.
35.Fang JC,He YZ,Wang ZY.Decoupling control strategy for high speed permanent magnet synchronous motor based on inversion system method.Proceedings of IEEE workshop on advanced research and technology in industry application(WARTIA).2014 Sep 29–30;Ottawa,Canada.Piscataway(NJ):IEEE Press;2014.p.895–8.
36.Ai SY,Liu G,He YZ,Mao K.Research on starting method based on QCSI for HS-BLDCM.Micromotors2013;46(4):61–5[Chinese].
37.Vapnik VN.The nature of statistical learning theory.New York:Springer-Verlag;1995.p.187.
38.Xu J,Tang YY,Zhou B,Xu Z,Li LQ,Yang L.The generalization ability of online SVM classification based on Markov sampling.IEEE Trans Neural Netw Learn Syst2015;26(3):628–39.
39.Shiton A,Palaniswami M,Ralph D,Tsoi AC.Incremental training of support vector machines.IEEE Trans Neural Netw2005;16(1):114–31.
40.Wang ZY,Zhang Z,Mao JQ.Adaptive tracking control based on online LS-SVM identifier.Int J Fuzzy Syst2012;14(2):330–6.
41.Yang T,Li B,Meng MQH.Robust object tracking with reacquisition ability using online learned detector.IEEE Trans Cybernet2014;44(11):2134–42.
3 March 2016;revised 13 May 2016;accepted 7 October 2016
Available online 21 December 2016
Ⓒ2016 Chinese Society of Aeronautics and Astronautics.Production and hosting by Elsevier Ltd.This is anopenaccessarticleundertheCCBY-NC-NDlicense(http://creativecommons.org/licenses/by-nc-nd/4.0/).
*Corresponding author.
E-mail address:zhengshiqiang@buaa.edu.cn(S.Zheng).
Peer review under responsibility of Editorial Committee of CJA.
 CHINESE JOURNAL OF AERONAUTICS2017年1期
CHINESE JOURNAL OF AERONAUTICS2017年1期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Anti-plane problem of four edge cracks emanating from a square hole in piezoelectric solids
- Stress analysis and damage evolution in individual plies of notched composite laminates subjected to in-plane loads
- Drilling load modeling and validation based on the filling rate of auger flute in planetary sampling
- An adaptive attitude algorithm based on a current statistical model for maneuvering acceleration
- Spacecraft attitude maneuver control using two parallel mounted 3-DOF spherical actuators
- Angular velocity determination of spinning solar sails using only a sun sensor