
Control techniques of tilt rotor unmanned aerial vehicle systems:A review
2017-11-21 12:53:34LiuZhongHeYuqingYngLiyingHnJind
CHINESE JOURNAL OF AERONAUTICS 2017年1期
Liu Zhong,He Yuqing,Yng Liying,Hn Jind
aState Key Laboratory of Robotics,Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,China
bUniversity of Chinese Academy of Sciences,Beijing 100049,China
Control techniques of tilt rotor unmanned aerial vehicle systems:A review
Liu Zhonga,b,He Yuqinga,*,Yang Liyinga,Han Jiandaa
aState Key Laboratory of Robotics,Shenyang Institute of Automation,Chinese Academy of Sciences,Shenyang 110016,China
bUniversity of Chinese Academy of Sciences,Beijing 100049,China
Aircraft structures;Dynamics modeling;Flight control;Tilt rotors;Unmanned aerial vehicle(UAV)
The tilt rotor unmanned aerial vehicle(TRUAV)exhibits special application value due to its unique rotor structure.However,varying dynamics and aerodynamic interference caused by tiltable rotors are great technical challenges and key issues for TRUAV’s high-powered flight controls,which have attracted the attention of many researchers.This paper outlines the concept of TRUAV and some typical TRUAV platforms while focusing on control techniques.TRUAV structural features,dynamics modeling,and flight control methods are discussed,and major challenges and corresponding developmental tendencies associated with TRUAV flight control are summarized.
1.Introduction
Aircraft technology has developed for more than a century since the Wright brothers completed their first flight experiments of planes with motors in 1903.1Many aircraft with both conventional and novel structures have been developed to meet various tasking requirements.Fixed-wing and rotorcraft aerial vehicles,as representations of aircraft with conventional structures,have played irreplaceable roles in aviation development for a long time.Fixed-wing aerial vehicles are equipped with wings and driven forward by propellers or turbine jet engines.Therefore,they have greater flight mileage,less noise,and higher cruise speed than other aircraft,and have been widely used for commercial and military purposes.However,takeoff environment affects normal flight and they cannot hover at a fixed position.Rotorcraft aerial vehicles,such as helicopters,which are driven by propellers with a swashplate in the vertical direction,can hover in one spot,but cruise speed and flight endurance are low.To combine the advantages of both vehicles,researchers worldwide have focused on aircraft with both high-speed cruise and vertical takeoff and landing(VTOL)ability.2This led to the concept of tilt rotor aerial vehicles.A great deal of attention has been drawn to it because this type of aerial vehicle meets commercial demands3along with its new technical characteristics.4
Tilt rotor aerial vehicles are aircraft that rely on wings and rotors for generating lift.5They have three flight modes:helicopter,transition,and airplane modes,as shown in Fig.1.Because of the variable rotor tilt angle,the most attractive characteristic of tilt rotor aerial vehicles is that they possess the capability to hover in place,as helicopters,while achieving much higher cruise speeds than conventional rotorcraft in airplane mode.Since this concept was proposed,many tilt rotor aircraft have been developed,5including the XV-15 and V-22‘Osprey” (see Fig.2(a))researched and developed by Bell and Boeing;the V-22 has since become the most valuable tilt rotor aircraft in the world.As control techniques,sensors and communication technologies develop,interest grows in unmanned aerial vehicles(UAVs)with tiltable rotors.UAVs are unmanned aircraft controlled through onboard computers or wireless remote control equipment,and the tilt rotor unmanned aerial vehicle(TRUAV)is a novel UAV that combines the advantages of fixed-wing unmanned aerial vehicles(FWUAVs)with those of rotorcraft unmanned aerial vehicles(RUAVs).TRUAVs offer unique advantages that can potentially solve the problems faced by UAVs with conventional structures such as limitations imposed by airfield or flight mileage.
Compared with FWUAVs,the power surface and control surface of RUAVs coincide,so an RUAV is accompanied by poor stability and the dynamics of nonlinear coupling,under-actuation,and multi-variable properties.6TRUAVs also face the same problems as RUAVs in the helicopter mode because of their similar structures.At the same time,TRUAVs face serious aerodynamic interference between rotors and wings due to their positional relationship,7which puts forward higher requirements for aircraft structural design8and flight controller design.In addition,the transition mode includes control variables of helicopter mode and airplane mode,and has its own varying dynamics.Therefore,how to allocate control quantity and ensure safety of the transition process9–11is a long-term difficulty of TRUAV control.The technical challenges faced by TRUAVs are not limited to those faced by FWUAVs and RUAVs.Challenges in flight control techniques are particularly outstanding and have attracted lots of attention globally.
This paper,based on current available references,reviews the flight control techniques of TRUAV systems.Section 2 briefly introduces certain TRUAV platforms and analyzes their structural features with regard to flight control.Section 3 introduces the research status on TRUAV flight controls and includes typical methods,discussions,and analyses.Section 4 concludes with the main problems challenging this field and its developmental tendencies.The paper is summarized at the end.
2.TRUAV platforms and fundamental structures
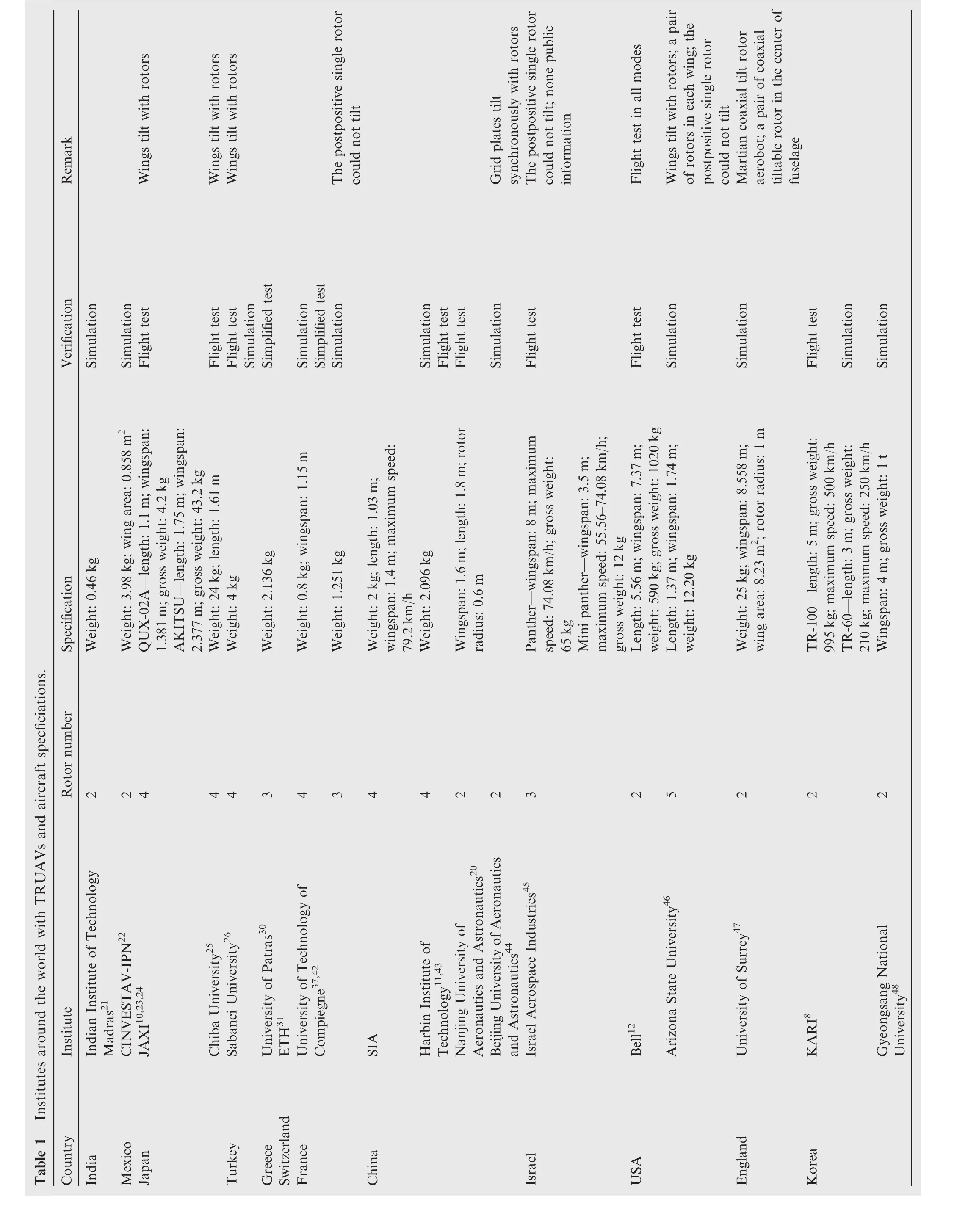
Since the effectiveness of tilt rotor aircraft was verified by Bell USA through the XV-15 and V-22,this company began the Eagle Eye project to research TRUAVs in 1993 and developed the first TRUAV 5 years later.The VTOL UAV designed for the United States Coast Guard in this project is shown in Fig.2(b).12In order to research novel VTOL UAVs,the Korea Aerospace Research Institute(KARI)designed and completed similar TRUAVs,9,13,14TR-100 and a scaled-down version TR-60(see Fig.2(c)),15since 2002,8and began control method research.It also researched ground test platforms15and optimal aircraft structure design16–18to improve the flight performance.The research conclusions of KARI are shown in Ref.19.The two TRUAVs shown in Fig.2(b)and(c)are Dual-TRUAVs,whose rotors are installed on the wingtips like the‘Osprey” tilt rotor aircraft.This structure was the earliest,and China’s Nanjing University of Aeronautics and Astronautics,20the Indian Institute of Technology Madras,21and Mexico’s Center for Research and Advanced Studies of the National Polytechnic Institute(CINVESTAV-IPN)22also focused on similar kinds of TRUAVs.
With the development of UAV design and control techniques,many TRUAVs with novel structures appeared in last 10 years.A quad tilt wing unmanned aerialvehicle(TWUAV)AKITSU(see Fig.2(d))displayed in Ref.23was developed by Japan Aerospace Exploration Agency(JAXA).It is a TRUAV with a novel tilt rotor structure in which rotors are assembled at the center of wings,and rotors and wings can tilt together24to reduce the impact caused by downwash as compared to structures in which the rotors tilt alone.Similar TWUAVs were also developed by Japan’s Chiba University25and Turkey’s Sabanci University.26–29The University of Patras30in Greece and Switzerland’s Federal Institute of Technology Zurich(ETH)31proposed a Tri-TRUAV(see Fig.2(e))32that separates rotors and wings,and consists of prepositive double tilt rotors and a postpositive single tilt rotor.33–36To reduce aerodynamic interference,rotors are mounted on both sides of the fuselage in front of and behind the wings.Fig.2(f)displays a Quad-TRUAV designed by the Shenyang Institute of Automation(SIA),Chinese Academy of Sciences.This aircraft has two pairs of tiltable rotors mounted at the front and back of the fuselageto reduceaerodynamic interference.A similar TRUAV was also developed by the University of Technology of Compiegne,France.37–40
A list of institutions and structural features of their current TRUAV platforms are showed in Table 1.If these TRUAVs are separated according to rotor number,they can be divided into two categories,Dual-TRUAV and Multi-TRUAV.The Dual-TRUAVs,such asTR-100,possesscomplicated structures with swashplates like a helicopter to adjust the longitudinal and lateral flapping angle of the rotor disc.Because the rotor is mounted on the wingtip,if the rotor-tilt angle is not large and the air speed is low,the aircraft can get caught in its own rotor downwash.Thus,the wing can be divided into two areas due to aerodynamic interference:a free stream area that is not affected by downwash and a slip stream area that is affected41(see Fig.3),which consequently influences the wing lift.Multi-TRUAVs use more rotors with a much more simple mechanical structure.They are usually driven by electric motors and implement flight control through regulating rotor spin rate.
Based on whether or not wings tilt with rotors,Multi-TRUVs can be further divided into two categories.The wings of some Multi-TRUAVs tilt with their corresponding rotor,and these TRUAVs are so-called TWUAVs.This novel tilt rotor structure can reduce the aerodynamic interference caused by rotor downwash effectively,but the lift coefficient of every wing changes with modification of the rotor-tilt angle.Moreover,other wings will not tilt with rotors,and rotors are usually not mounted on wings anymore,partly to reduce such interference.
Observation 1.Through the summary and analysis above,Dual-TRUAVs are badly affected by rotor downwash,which makes trouble for their dynamics modeling.By comparison,Multi-TRUAVs will always have less aerodynamic interference because of the actuating unit’s reduction of structural complexity.The more symmetrical aircraft structure can increase freedom in the physical design,which leads to lots of Multi-TRUAVs springing up in recent years.However,the actuators of different flight modes are different for both Dual-TRUAVs and Multi-TRUAVs.Especially in the transition mode,the aircraft will be controlled by rotors and the control surfaces of wingsand empennagestogether,making flightcontrol difficult.
?
3.Research status of TRUAV control techniques and main methods
This section discusses the research status of TRUAV control techniques.Considering flight safety and stable transition between different modes,Section 3.1 introduces the calculation methods of a special flight envelope called the tilt corridor.Then,TRUAV dynamics modeling methods are introduced in light of the close connection between dynamics modeling and controller design.TRUAV control methods are introduced in Section 3.3 based on different dynamics models.
3.1.Tilt corridor of TRUAVs
The rotors of a TRUAV can tilt from the vertical position to horizontal position or inversely in the transition mode for purposes of acceleration or deceleration to switch to another flight mode.At this point,the aircraft is in a varying-stated and varying-shaped procedure,and the wings and rotors can overcome both gravity and drag in the vertical direction.In the transition from helicopter mode to airplane mode,if the rotor-tilt angle is too large or the air speed is too low,the flight height can decrease,which may lead to crashes in some cases;however,greater air speed is limited by the rated power of the rotor drive mechanism and controller performance.Hence,it is necessary to limit the lowest and highest air speed of TRUAVs with a special rotor-tilt angle,and that generates a rotor-tilt angle–air speed envelope called the tilt corridor.14,20,24Fig.4 shows the tilt corridor of KARI TR-60,14in which the horizontal axis represents the air speed of the aircraft,and the vertical axis represents the rotor-tilt angle.The dotted line in the range of solid lines represents the law of rotor-tilt angle variation with air speed.To ensure flight safety and stability,the flight state,with air speed and rotor-tilt angle represented by the hollow circle,should be within the range of the tilt corridor.
Because the tilt corridor can be measured via many flight experiments,not every reference concerning the transition control of the TRUAV attaches importance to its access.14,23,46,47In consideration of the danger of flight experiments without any evidence,Song and Wang,20Muraoka24and Fang44et al.adopted an engineering method based on the trim calculation of a nonlinear dynamics model to obtain the tilt corridor.In order to guide the control of an actual aircraft,it is necessary to obtain a dynamics model with high precision,which is usually ensured by model wind tunnel experiments.20,24For one fixed rotor-tilt angle,it is possible to trim the nonlinear dynamics model and obtain researchable maximum and minimum flight speeds based on suitable initial conditions and a range of pitch angle,and the tilt corridor can be obtained.Because of the difference between the actual aircraft and a theoretical model,and the calculation error of the trim process,the results obtained above may be approximated,so the safety threshold is needed in application.
There is no extensive research on theoretical calculation methods for tilt corridor.Cao and Chen49introduced a calculation method by dividing a tilt corridor into curves of lowspeed and high-speed portions.The curve of the low-speed portion describes the minimum speed from the hover status in the helicopter mode to the status when the wings are without stall in the airplane mode,which can be calculated by analyzing the force equilibrium of the wings and rotors under the critical angle of attack as follows:
whereTis the thrust of propellers;Gis gravity;in,a1and αfare rotor-tilt angle,maximum chamfering of a rotor,and fuselage angle of attack,respectively;LandDare lift and drag related to air speed.The curve of the high-speed portion describes the maximum speed with good flight performance from helicopter mode to airplane mode,which can be obtained by analyzing the actual power and rated power,as follows:
wherePrandPnare actual power and rated power,respectively; ηpand ρ are power transmission loss coefficient and air density;rand ω are propeller radius and rotor speed;and rotor power coefficientCpis concerned with air speed.This procedure is used to calculate the tilt corridor of the XV-15 tilt rotor aircraft,and the result obtained is similar to the official data,but this calculation or similar procedure has not yet been used for TRUAVs.
Observation 2.The control safety and stable transition between different modes can be ensured within the tilt corridor to some extent,which requires access to this special flight envelope.In general,the tilt corridor can be obtained by flight experiments and a set of trim calculations,and the corresponding theoretical calculation method should be studied further.Moreover,after obtaining a tilt corridor,a reasonable transition curve is needed within the range of the corridor to indicate the law of rotor-tilt angle variation with air speed,and this curve should be optimized in flight tests to improve the flight performance,especially in the transition mode.
3.2.Flight dynamics modeling
The TRUAV is an under-actuated system.Hence,the controller design is always based on the dynamics model.An accurate dynamics model with suitable complexity is essential for dynamic response analysis and tilt corridor calculation.
As shown before,the wing of Dual-TRUAVs can be divided into two areas(see Fig.3).The slip stream area will induce partial loss of lift and affect the payload of the TRUAV,and this effect varies with rotor-tilt angle and air speed,which was a challenge in the research and development process of the V-22.As far as the Multi-TRUAVs are concerned,the impact caused by the rotor downwash has been alleviated by changing the aircraft structure,but has not been completely eliminated.At the same time,some new issues caused by the novel aircraft structure,such as the dynamic wing lift,should also be considered in the dynamics modeling.Earlier,to accurately represent the dynamics properties of a tilt rotor aircraft,such as XV-15 and V-22,several look-up tables,correlation factors,50or complex aerodynamic calculations51,52were needed that improved the complexity of the dynamics model and increased the difficulty of control design.A dynamics model with a suitable complexity that accurately reflects dynamic characteristics is the basis of the TRUAV control algorithm,but a problem of the control technique.
Thus far,most of current available studies obtained the TRUAV 6-DoF nonlinear model via the first-principles approach,and the model always consists of an aircraft rigid body dynamics model and aerodynamic models that consists of further rotor dynamics,wing dynamics,and empennage dynamics models.In the aircraft rigid body dynamics model,theaircraftisassumed to bea rigid body in threedimensional space,and the dynamic equations are as follows according to the Newton-Euler method53:
where×is the cross product of two vectors;mand J are mass and inertia matrix respectively;Vband Ωbare velocity vector and angular velocity vector in the body coordinate system;Fband Mbare the resultant force vector and moment vector in the body coordinate system.Most of the propellers of current TRUAVs are actuated by direct current motors.Hence,the rotor dynamics model can be simplified as follows54:
whereTrandQrare the thrust and reaction torque generated by one rotor;Ais the rotor disc area;CTandCQare the thrust and torque coefficients,respectively.The dynamics model of the wing and empennage is based on aerodynamics.By using the wing as an example,the lift and drag produced by one wing are as follows26,55:
where α is the wing angle of attack;vis the air speed of the wing;Sis the wing area;CL(α)andCD(α)are lift coefficient and drag coefficient,respectively,that are related to the angle of attack.Further considering the interference for wings and empennage caused by the rotor downwash,the calculation of the aerodynamic coefficient would be more complicated compared with that for a normal fixed-wing aircraft,51,52and some references consider this aeromechanical problem.56,57In this way,a few references for tilt rotor aircraft, such as the XV15,58some references for Dual-TRUAVs,59,60and almost all references for Multi-TRUAVs25,26,31,37,44,46consider wings and rotors as two independent units and ignore the complicated aerodynamic interference to reduce the complexity of the dynamics model,and carry out simulation tests of different control methods.To set up an accurate Dual-TRUAV dynamics model or improve the veracity of a Multi-TRUAV dynamics model further,some institutes set up a mathematical model based on aerodynamic coefficient curves of the wing and empennage by performing model wind tunnel experiments under different conditions.10,20,24The dynamic response of the theoretical model and actual aircraft can be compared.20This method can take the aerodynamic interference into account implicitly and improve the model accuracy without further increasing the calculation complexity.Based on above 6-DoF nonlinear model,the tilt corridor can be calculated,24,28and it can also be linearized20,22,27,28,46,47or simplified into a longitudinaldynamicsmodel37,39,40to design different flight controllers.
Compared with the first-principles approach,it is easier to acquire an accurate response model of a UAV at a stable operating point with system identification.61Papachristos et al.36and Fu62combined the first-principles approach and system identification to obtain the position response to flight attitude and rotor-tilt angle of the Tri-TRUAV at different operating points and system response to control variables of the Quad-TRUAV,respectively.However,considering the differences in dynamics of this variable-structured aircraft under different rotor-tilt angles,it is hard to determine the whole dynamics characteristics using one or few identification models at operating points.63Therefore,there are not many references for this modeling method.
Observation 3.The complex aerodynamic interference of a TRUAV is always ignored by current dynamics models to simplify the calculations of aircraft aerodynamic coefficients.These models can be applied to simulation tests of control algorithms,but there are no references verifying whether these models can be used for controlling an aircraft.Actually,because of the direct disregard of the mutual influence between rotors and wings,the stability and safety of an aircraft are not supposed to be protected.In recent years,great importance has been attached to modeling based on model wind tunnel experiments and system identification.Because several flight experiments are required under different rotor-tilt angles and modes,aerodynamics coefficients do not have explicit mathematical expressions,and the linear state equation reflects part of the dynamics characteristics only;although these methods can improve model accuracy,it is hard to apply them to the design of actual controllers.In general,dynamics modeling,especially in the transition model,is still the major issue in this field.
3.3.Flight control
Based on the linear model from the linearization of a nonlinear model or system identification,the simplified nonlinear model,or intelligent algorithms such as artificial neural network(ANN),the linear controller,nonlinear controller,or controller based on the intelligent algorithm can be designed respectively to enable the hover in the helicopter mode,cruise in the airplane mode,or transition between modes.The TRUAV control algorithms are summarized in Table 2,which lists different control methods by available references and realizations of mode transition.This subsection discusses them emphatically.
3.3.1.Linear control
(1)PID control
In the classical control theory based on the frequency domain response and root-locus method,PID control is the most widely researched method in theory and engineering.Because the design of this method does not rely on accurate dynamics models,the parameters of this controller can be modified according to the control effect of the actual aircraft,the 6-DoF nonlinear model,or the transfer function of a single control channel.Therefore,many researchers have built controller structures based on PID control,and the stable flights of TRUAVs on experimental platforms have been achieved in different modes.
Oner et al.29developed a 6-DoF nonlinear model based on the developed Quad-TRUAV,and translated actual control variables into pseudo control variables for every control channel as follows:
where ωi(i=1,2,3,4)is the rotation speed of every rotor;kis a defined thrust coefficient;λ is a specific value of the defined thrust coefficient and torque coefficient;lsandllare the distances from the rotor to the center of gravity in they-direction andx-direction of the body coordinate system,respectively.These pseudo control variables decouple the flightcontrol,and PID controllers with gravity compensation,which realize attitude control in the helicopter mode,are as follows:

Table 2 Summary of TRUAV control methods.
wheregis gravitational acceleration;Ixx,IyyandIzzare the inertia in three directions of the body coordinate system;zis the vertical position;φ,θ and ψ are Euler angles;Kp,KiandKdare PID parameters;ez,eφ,eθandeψrepresent tracking errors.Indoor and outdoor flight tests show that the aircraft stability and flight height tracking can be ensured by this angle loop controller.Papachristos et al.30and Wang43based on the transfer functions of pitch,roll,and yaw control channels,designed a PID controller,and graphic methods,such as root locus method and bode diagram,were used to analyze the control performance.The effectiveness of these controllers is also tested by hover experiment on the actual flight platform.
Due to the poor performance of the PID controller faced with a plant with nonlinear coupling and uncertain complex structures,decoupling analysis like Eq.(10)is necessary for the TRUAV,which is an under-actuated multiple-input multiple-output(MIMO)system.Moreover,the transition mode requires the coordination of multiple sets of controllers,10,23,24,31which will be introduced below in detail.
(2)Eigenvalue assignment and optimum control
Eigenvalue assignment and optimum control are common methods of modern control theory,and eigenvalues of the system matrix are assigned via a feedback gain.64Their resolvable problems are more than classical control methods because they are time domain methods based on state space equations and more suitable for computer calculations.
Song20,Hernandez-Garcia22,Nonami25and Oner27et al.used the above-mentioned methods to study the control of a TRUAV under different rotor-tilt angles.Song and Wang20obtained a piecewise affine(PWA)system model of a TRUAV by linearization at many trim points,and designed the angular rate loop controller using eigenvalue assignment for every linear model.In this way,the outer-loop controller by PID could be obtained for tracking the attitude angle under a fixed rotortilt angle.Oner et al.27made use of the optimal control theory to design LQR,and stabilized the nonlinear model near a trim point.
Flight control based on the eigenvalue assignments or optimal control demands an accurate linear model of the controlled plant, which is acquired by linearizing the corresponding nonlinear model.For a nonlinear plant,the control range of a controller is limited near a trim point.Controllers based on the PWA system model can stabilize this nonlinear model in a large-ranged flight envelope.20,22
(3)Robust control
The design procedure of a robust flight controller is similar to the procedure of above eigenvalue assignment methods.They are all based on the TRUAV linear model,and the controller may be applied to a relevant nonlinear plant.The difference is that robust flight control improves system robustness against dynamic uncertainties,such as the position change of the center of gravity in the TRUAV transition mode46and the inaccuracy of the aerodynamic coefficient because of the dynamics modeling.47Designing controllers against uncertain factors and analyzing the robustness of the close-loop system are absolutely beneficial to improve the TRUAV control safety and flight performance.
(4)Model predictive control
As a control method for systems with long delay times,non-minimum phases,or unstable ones,MPC has been used to control various processes.65Mehra66,67and Kvaternik68et al.discussed the feasibility of applying MPC to the aircraft control augmentation systems of XV-15 and V-22,and simulation results show control effectiveness and aeroelastic stability augmentation in airplane mode.
Based on above references,Papachristos et al.34–36studied the MPC control performance for min Tri-TRUAV,and a hierarchical controller structure was designed for the test platform.Considering the fast response characteristics of the rotor-tilting servos in directly providing translationcontrolling forces,the rotor-tilt angle is regarded as a control variable.Based on the linear model of position response,minimize the MPC cost function with multivariable constrained quadratic form by receding horizon optimization to track the reference position34and the outer-loop of the controller is obtained.The inner-loop employs a proportional derivativedouble derivative(PD-dD)controller32to control the aircraft attitude,and the structure of the controller is shown in Fig.5,wherexandyrepresent longitudinal and lateral positions;X is position vector;variables with subscript “r”represent corresponding reference values. Based on this hierarchical structure,considering the dynamics changing with the rotor-tilt angle,a PWA system model is applied to approximate the nonlinear model,and an MPC controller can be designed for every sub-model.Comparing the values of cost functions under different rotor-tilt angles,the MPC controller of the sub-model with a minimum value of the cost function is regarded as the optimal MPC controller.35The details of this hierarchical controller can be found in Ref.36.
In the common hierarchical controller of the RUAV,69the pitch angle is always regarded as the pseudo control variable of the longitudinal position.However,above studies regard both the pitch angle and rotor-tilt angle as pseudo control variables for ‘dual-authority” control of the longitudinal position,and the longitudinal position response to these two variables can be acquired by system identification.Trajectory tracking under a slight rotor-tilt angle is achieved eventually.Because the above test platform lacks an aerodynamic structure,the whole transition from helicopter mode to airplane mode cannot be evaluated.
(5)Transition control based on gain scheduling
In the transition model,rotors can tilt from the vertical to horizontal position or inversely,the direction of the propeller thrust can change constantly,and the aircraft is in a special flight phase with varying dynamics.Undoubtedly,the linear controller based on a linear model under a special rotor-tilt angle cannot stabilize the aircraft in the three flight mode.In addition,the aircraft is controlled by rotors and control surfaces of wings and empennages together.Hence,determining the control quantity and ensuring the safety of the transition process are challenging for TRUAV control.
Most of the references adopt the concept of gain scheduling(GS)to deal with the varying dynamics characteristics.Muraoka et al.10,24and Verlling and Zilly31implemented the same control idea in which two sets of controllers,including attitude angle loop PID control and angular rate loop PID control,are designed for the helicopter mode and airplane mode respectively.In the transition mode,the control variables from the two are mixed by a control weight concerned with the rotor-tilt angle,which can be represented as follows31:
whereWrepresents the control weight of helicopter mode control variables.In the transition mode,if the helicopter mode and airplane mode control variable vectors are URand UF,WURand(1-W)UFwould control the TRUAV simultaneously.This method is called smooth switch control in some papers70and is a special GS control method.The control structure is shown in Fig.6.This control concept is also employed by the open source flight control system PixHawk to control an aircraft with tiltable rotors.
To ensure the robustness and stability range of the close-loop system,Sato and Muraoka23designed multiple sets of controllers for the helicopter mode and airplane mode according to different rotor-tilt angles.Based on the smooth switch control,the controller set consisting of a helicopter mode controller and an airplane mode controller could be switched.Thecontrollerrobustnessofevery modelis guaranteed by
where k is control gain matrix;K denotes the admissible domain of k to avoid the saturation of actuators;andfcost(·)is the cost function.This equation minimizes the cost among all supposed models.Introducing divide and conquer(DC)gain scheduling in smooth switch control could help combine a set of linear and time-invariant controllers and acquire a nonlinear controller eventually.DC gain scheduling control as a classical gain scheduling design approach71has been widely employed for the transition control of a TRUAV.For example,Hernandez-Garcia and Rodriguez-Cortes22,Dickeson et al.46,and Zhao and Underwood47linearized the nonlinear model at many trim points,and designed corresponding linear and time-invariant controllers for every linear model.Based on a rotor-tilt law,the suitable linear controller could be switched according to the flight state,and the mode transition would be achieved.Zhao and Underwood47presented the controller structure based on DC gain scheduling,as shown in Fig.7 whereVcrrepresents the cruise speed of the TRUAV.The controller structure of other studies is similar to this,and the switch logic is set by the tilt corridor.Zhao and Underwood47pointed out that to stabilize the close-loop system,the dwell-time(generally denoting the settling time after controller switching)should be less than the variation of the parameter to ensure that the current controller has stabilized the plant before switching to another controller.Dickeson et al.46also evidenced this requirement:a faster rotor-tilt angular rate is beneficial to accelerate longitudinally,but the control performances of the vertical position and pitch angle are compromised.
Observation 4.Based on the summary listed in Table 2,smooth switch control and DC gain scheduling are usually utilized in linear control for mode transition of a TRUAV.The essence of the two methods is to combine the controllers of different conditions,and control the plant with the transitional condition between above-mentioned special conditions.Undoubtedly,the method based on controller combination could control TRUAV well,and has been applied in most engineering applications and several parts of theoretical study.This method depends on the stability range of different systems with different controllers.Hence,it is important to determine how to ensure the optimal stability range of whole TRUAV transition mode based on smooth switch control and DC gain scheduling abstractly,and how to analyze the robustness under some disturbances.
Observation 5.In the flight test of TRUAV,linear controllers are seldom applied aside from the PID method because most of them rely on the accurate dynamics models,which is still a challenging problem.The hierarchical PID controller is common,and smooth switch control has been widely used for the transition mode.Furthermore,most of the current research is only verified through simulations,and real flight tests are rare(see Table 1).That means there may be many more practical problems that greatly influence the control performance of TRUAVs,for example,the sensitivity of control performance with respect to rotor speed errors.This would be a serious problem for the Dual-TRUAVs with swashplates.
3.3.2.Model-based nonlinear control
The nonlinear control method analyzing system stability based on the Lyapnov method can deal with nonlinear dynamics effectively.In this way,many nonlinear feedback control tools,such as backstepping,sliding mode control,and feedback linearization,have been considered for TRUAV control in different flight modes.
Chowdhury21and Oner28et al.combined backstepping with PID and sliding mode control with LQR,respectively,for the helicopter mode,and performed the simulation tests.Flores et al.37,38realized position tracking in the helicopter mode via a Lyapunov design and feedback linearization,and designed the airplane mode controller based on backstepping.
Flores and Lozano39,40tried to implement transition control of the Quad-TRUAV using the nonlinear feedback control tool.The simplified TRUAV longitudinal dynamics model is as follows:
whereTtandTdare the total thrust and the difference of forward and back thrusts,respectively;δ anduiare the elevator deflection and the virtual control variable of the rotor-tilt angle;CM(α)represents pitch moment coefficient.According to above model,the outer-loop of controller is based on the nested saturation control,39and total thrust and rotor-tilt angle are regarded as control variables to make the longitudinal speed˙xand vertical positionztrack the reference values.Analyzing vertical forces by Eq.(14),for the flight safety,rotor-tilt angle should fulfill the following equation when the pitch angle is stable.
whereuzis the nested control variable.The inner-loop is based on backstepping,40and the difference of forward and back thrusts and virtual control variableuiare regarded as control variables to control the pitch angle and rotor-tilt angle.uiis with the unit of torque,and Eq.(16)is with the structure of strict feedback system,which is required by backstepping method.This transition controller is also with hierarchical structure for position control and attitude control.Compared with the common hierarchical controller of the RUAV,rotortilt angle rather than pitch angle takes the role of the pseudo control variable of position loop to hold the flight altitude for flight safety.
Observation 6.Nonlinear feedback control tools are usually used for helicopter mode control of a TRUAV.Some simplif ication is needed for transition control,such as considering the longitudinal dynamics model only,to simplify the controller design procedures.Such design procedures and stability analysis of a nonlinear controller are more complicated compared with those of a linear controller,so there are still few studies on this topic.The transition control methods of TRUAV especially require further study.In addition,it is still hard to verify the nonlinear control techniques in real flight tests because of their strong dependence on the accuracy of nonlinear models.
3.3.3.Control base on the intelligent algorithm
Some intelligent algorithms,such as ANN,genetic algorithms,and particle swarm optimization(PSO)method,can be used to solve several complicated engineering problems,and combing these algorithms with typical control methods70,72has provided a new direction for the development of control techniques and also revealed a new path for TRUAV control.Peng et al.73introduced the ANN into a PID controller to improve the robustness of the smooth switch control,and utilized the strong nonlinear mapping characteristics of the ANN to adopt to the model variation in the transition mode of the tilt rotor aircraft.In addition,the requirement for extensive gain scheduling from tilt rotor aircraft linear control can also be alleviated by using intelligent algorithms.For example,Rysdyk and Calise74and Yu et al.75adopted the ANN to compensate for the dynamic inversion error and external disturbances for the control of tilt rotor aircraft without gain scheduling.The former method has been utilized in the control of a TRUAV by Kim et al.48Considering the multi-layer ANN is complex with so many states in the input layer and hidden layers,Fang et al.44chose to estimate the model error by a state observer and compensate the dynamic inversion error to control a Dual-TRUAV.There are also parts of references optimizing the gain scheduling control by intelligent algorithms.Lee et al.13made use of PSO method to obtain the gain of every linear controller by converting an autopilot design problem to a parameter optimization problem.
Some methods such as ANN have been used to improve the adaptability of traditional control methods to handle the variation of dynamics in the transition mode.Introducing intelligentmethodsinto a traditionalcontrollercould help improve the control performance,but the structure of the controller becomes more complicated,and the offline training required by ANN,etc.,also complicates the design procedure of controllers.In addition to the simulation tests,flight tests for these control methods are also essential.
4.Major problems and prospects
4.1.Major challenges faced by TRUAV control techniques
TRUAV control techniques have been studied for more than 20 years,but are still in initial stages.Although extensive research on large tilt rotor aircraft and UAVs could provide some reference techniques,there are still several issues retiled to TRUVs,mainly including the reasonable TRUAV dynamics modeling method,multiple control functions as a result of advanced aircraft structures,safe transition between flight modes,and flight planning methods faced with tasks.
(1)Reasonable aircraft dynamics modeling
The reasonability of dynamics modeling is emphasized here.The wings and rotors are mounted to control different flight modes of TRUAVs.Hence,different layouts result in different aerodynamic interference levels by rotor downwash.On the one hand,an accurate aircraft dynamics model may requireseveralcomplexaerodynamiccomputationsand flight experiments.On the other hand,ignoring the interference may create large model errors between the dynamics model and the actual aircraft,which adversely affect the flight test.Hence,a compromise point of accurate modeling and model simpli fication is required to build a mathematical model describing the dynamics well and with less modeling dif ficulty,which should be the most important issue in this field.
(2)Multiple and isomerous control functions as a result of advanced aircraft structures
The design of aircraft with advanced structures is a potential trend in the development of aircraft that exhibit multiple and isomerous control functions.4The transition mode of TRUAVs incorporates the multiple control functions of rotors and control surfaces that not only affect the aerodynamic coefficients,but also lead to a great deal of control coupling.The combination of many sets of controllers is utilized for this coupling,and acceptable performance is reached,but the research on controller robustness and control gain optimization methods is still lacking.
(3)Safe transition between different flight modes
The safety of transition control based on DC gain scheduling,vertical force analysis,or model inversion can all be ensured essentially by the tilt corridor,which describes the relationship between the air speed and rotor-tilt angle.At present,most tilt corridors are obtained by trim calculations or actual flight tests in which trim conditions and test safety should be focused on.The mathematical derivation of the TRUAV tilt corridor has not been implemented by any institute.
(4)Flight planning methods faced with task objects
The TRUAV has the functions of VTOL and high-speed cruising that make it more suitable for complicated external environments and task demands compared with RUAVs and FWUAVs.In a structured environment,and even unstructured environments,how to plan routes in reasonable flight mode according to actual environmental factors to meet constraints with an appropriate flight state is an essential factor that affects the actual application of TRUAVs.Furthermore,how to rely on the large control redundancies to improve flight safety is also worth considering.
4.2.Developmental tendencies in this field
The control techniques of TRUAVs need to be perfected,and current problems associated with it need to be solved.According to the research status and major associated problems,developmental tendencies can be listed as follows:
(1)A reasonable flight dynamics model is the basis of control methods.Hence,it is necessary to focus on accurate TRUAV modeling,model simplification,and compromise between model accuracy and complexity.Simultaneously,system identification combined with the active modeling technique would result in a more accurate dynamics model,and combining the model error correction technique with traditional control design would improve the controller adaptability in the transition mode.
(2)The transition mode of TRUAVs has complicated and varying dynamics.Hence,the stability range of nonlinear systems and controller robustness against dynamic uncertainties should be emphasized in this mode.It would also be worthwhile considering optimal control gains and controller weights by optimization algorithms based on stability range analysis,or increasing controller adaptability by intelligent algorithms and online correction for stable and safe transition between flight modes.
(3)Further study of TRUAV planning problems based on current achievements is required.The path-planning algorithm in different environments and the flight mode planning methods of this aircraft should be considered to improve task execution ability.
(4)At present,most research achievements have been verified by simulation experiments.Many types of control algorithmsrequirefurther flighttestsin different TRUAV flight platforms.Flight planning methods faced with task objects should also be verified later.
(5)TRUAV control techniques should keep up with the overall developmental tendencies of flight control.4The nonlinear dynamics owing to innovative aircraft layouts should be focused on,and the innovative,hybrid,and isomerous control methods and theories should be studied to improve aircraft autonomy in unstructured environments.
5.Conclusions
Focusing on control techniques,this paper outlines the essential concepts and structural features of some TRUAV platforms and presents the research status of dynamics modeling and flight control methods in detail.The major problems in the development process and the corresponding developmental tendencies are also discussed.
With the advancement of modern science and technology,UAVs with conventional structures can no longer meet certain mission requirements;hence,the TRUAV has been developed to make up for this and shows broad prospects for application relying on its varying structure.However,research is still in its initial stage,and TRUAV dynamics modeling and controller design face several problems.With the devotion of global institutes to the accuracy of the mathematical models,the safety of transition control,and other TRUAV-related areas,new ideas and methods are continuously introduced that can overcome existing challenges and ensure TRUAVs play an increasingly important role in the UAV world.
Acknowledgements
This study was co-supported by the National Natural Science Foundation of China(Nos.61503369 and 61433016).
1.Wright brothers[Internet].Florida:Wikimedia Foundation,Inc.;2001[updated 2016 Apr 14;cited 2016 Apr 21].Available from:<https://en.wikipedia.org/wiki/Wright_brothers>.
2.Dugan DC.Trust control of VTOL aircraft-part deux.Proceedings of the 5th decennial AHS aeromechanics specialists’conference;2014 Jan 22-24;San Francisco.Washington,D.C.:NASA;2014
3.Unger G,Alexander H.Research needs for a commercial passenger tiltrotor[Internet].Washington,D.C.:NASA Technical Reports Server;1991[cited 2016 Apr 21].Available from:<http://ntrs.nasa.gov/search.jsp?R=19920073674>.
4.Chen ZJ,Zhang RL,Zhang P,Zhou R.Flight control:Challenges and opportunities.Acta Autom Sin2013;39(6):703–10[Chinese].
5.Tilt rotor[Internet].Florida:Wikimedia Foundation,Inc.;2001[updated 2016 Mar 28;cited 2016 Apr 21].Available from:<https://en.wikipedia.org/wiki/Tiltrotor>.
6.He YQ,Han JD.Acceleration-feedback-enhanced robust control of an unmanned helicopter.J Guid Control Dynam2010;33(4):1236–50.
7.Yeo H,Johnson W.Performance and design investigation of heavy lift tilt-rotor with aerodynamic interference effects.J Aircraft2009;46(4):1231–9.
8.Park JS,Jung SN,Lee MK,Kim JM.Design optimization framework for tiltrotor composite wings considering whirl flutter stability.Compos Part B-Eng2010;41(4):257–67.
9.Choi S,Kang Y,Chang S,Koo S,Kim JM.Development and conversion flight test of a small tiltrotor unmanned aerial vehicle.J Aircraft2010;47(2):730–2.
10.Muraoka K,Okada N,Kubo D.Quad tilt wing VTOL UAV:Aerodynamic characteristics and prototype flight test.Proceedings of AIAA infotech@aerospace conference and AIAA unmanned unlimited conference;2009 Apr 6–9;Seattle.Reston:AIAA;2009.p.6–13.
11.Ge WZ.Control system design on the transition stage of quad tilt rotor aircraft[dissertation].Harbin:Harbin Institute of Technology;2014[Chinese].
12.Bell eagle eye[Internet].Florida:Wikimedia Foundation,Inc.;c2001[updated 2016 Jan 22;cited 2016 Apr 21].Available from:<https://en.wikipedia.org/wiki/Bell_Eagle_Eye>.
13.Lee JH,Min BM,Kim ET.Autopilot design of tilt-rotor UAV using particle swarm optimization method.Proceedings of 2007 international conference on control,automation and systems;2007 Oct 17-20;Seoul,Korea.Piscataway(NJ):IEEE Press;2007.
14.Kang Y,Park B,Yoo C,Kim Y,Koo S.Flight test results of automatic tilt control for small scaled tilt rotor aircraft.Proceedings of 2008 international conference on control,automation and systems;2008 Oct 14-17;Seoul,Korea.Piscataway(NJ):IEEE Press;2008.
15.Hwang S,Choi S.Ironbird ground test for tilt rotor unmanned aerial vehicle.International Journal of Aeronautical and Space Sciences2010;11(4):313–8.
16.Lee HY,Jung JS,Hwang IS,Kim SJ,Jung SN.A new VTOL UAV cyclocopter with cycloidal blades system.Proceedings of the American helicopter society 60th annual forum;2004 Jun 7-10;Baltimore.Alexandria:AHS;2004.
17.Lim J,Kim T,Shin SJ,Kim DH.Structural integrity design of a composite wing in a tiltrotor aircraft.Proceedings of the 18th international conference on composite materials;2011 Agu 21-26;Jeju Island,Korea.2011.
18.Kim T,Lim J,Shin SJ.Structural design optimization of a tiltrotor aircraft composite wing to enhance whirl flutter stability.Compos Struct2013;95(1):283-94.
19.Ahn OS,Kim JM,Lim CH,Eve E.Smart UAV research program status update:achievement of tilt-rotor technology development and vision ahead.Proceedings of 27th congress of the international council of the aeronautical sciences;2010 Sep 19-24;Nice,France.Bonn,Germany:ICAS;2010.
20.Song YG,Wang HJ.Design of flight control system for a small unmanned tilt rotor aircraft.Chinese J Aeronaut2009;22(3):250-6.
21.Chowdhury AB,Kulhare A,Raina G.A generalized control method for a tilt-rotor UAV stabilization.Proceedings of the 2012 IEEE international conference on cyber technology in automation,control,and intelligent systems;2012 May 27-31;Bangkok,Thailand.Piscataway(NJ):IEEE Press;2012.
22.Hernandez-Garcia RG,Rodriguez-Cortes H.Transition flight control of a cyclic tiltrotor UAV based on the Gain-Scheduling strategy.Proceedings of the 2015 international conference on unmannedaircraftsystems;2015 Jun 9-12;Denver,USA.Piscataway(NJ):IEEE Press;2015.
23.Sato M,Muraoka K.Flight Controller design and demonstration of quad-tilt-wing unmanned aerial vehicle.J Guid Control Dynam2014;38(6):1071–82.
24.Muraoka K,Okada N,Kubo D,Sato M.Transition flight of quad tilt wing VTOL UAV.Proceedings of the 28th congress of the international council of the aeronautical sciences;2012 Sep 23-27;Brisbane,Austrilia.Bonn,Germany:ICAS;2012.
25.Nonami K,Kendoul F,Suzuki S,Wang W,Nakazawa D.Development of autonomos quad-tilt-wing(QTW)unmanned aerial vehicle design,modeling,and control.Autonomous flying robots.Berlin:Springer;2010.p.77–93.
26.Cetinsoy E,Dikyar S,Hancer C,Oner KT,Sirimoglu E,Unel M,et al.Design and construction of a novel quad tilt-wing UAV.Mechatronics2012;22(6):723–745.
27.Oner KT,Cetinsoy E,Unel M,Aksit MF,Kandemir I,Gulez K.Dynamic model and control of a new quadrotor unmanned aerial vehicle with tilt-wing mechanism.World Acad Sci Eng Tech2008;45:58–63.
28.Oner KT,Cetinsoy E,Sirimoglu E,Hancer C,Ayken T,Unel M.LQR and SMC stabilization of a new unmanned aerial vehicle.World Academy of Science,Engineering and Technology2009;3(10):367–72.
29.Oner KT,Cetinsoy E,Sirimoglu E,Hancer C,Unel M,Aksit MF,et al.Mathematical modeling and vertical flight control of a tiltwing UAV.Turk J Elec Eng&Comp Sci2012;20(1):149–57.
30.Papachristos C,Alexis K,Tzes A.Design and experimental attitude control of an unmanned tilt-rotor aerial vehicle.Proceedings of the 15th international conference on advanced robotics;2011 Jun 20-23;Tallinn,Estonia.Piscataway(NJ):IEEE Press;2011.
31.Verlling S,Zilly J.Modeling and control of a VTOL glider[dissertation].Zurich:Swiss Federal Institute of Technology Zurich;2013.
32.Papachristos C,Alexis K,Tzes A.Towards a high-end unmanned tri-tiltrotor:Design,modeling and hover control.Proceedings of the 2012 20th mediterranean conference on control and automation;2012 Jul 3-6;Barcelona,Spain.Piscataway(NJ):IEEE Press;2012.
33.Papachristos C,Alexis K,Tzes A.Linear quadratic optimal trajectory–tracking control of a longitudinal thrust vectoringenabled unmanned tri-tiltRotor.Proceedings of the 39th annual conference of the IEEE industrial electronics society;2013 Nov 10-13;Vienna,Austria.Piscataway(NJ):IEEE Press;2013.
34.Papachristos C,Alexis K,Tzes A.Model predictive hoveringtranslation control of an unmanned tri-tiltrotor.Proceedings of the2013 IEEE international conference on robotics and automation;2013 May 6-10;Karlsruhe,Germany.Piscataway(NJ):IEEE Press;2013.
35.Papachristos C,Alexis K,Tzes A.Technical Activities Execution with a TiltRotor UAS employing explicit model predictive control.Proceedings of the 19th world congress the international federation of automatic control;2014 Aug 24-29;Cape Town,South Africa.Vienna,Austria:IFAC;2014.
36.Papachristos C,Alexis K,Tzes A.Dual-authority thrust-vectoring of a tri-tiltRotor employing model predictive control.Journal of Intelligent&Robotic Systems2015;81(3):1-34.
37.Flores G,Lugo I,Lozano R.6-DOF hovering controller design of the quad tiltrotor aircraft.Proceedings of the 53rd IEEE annual conference on decision and control;2014 Dec 15-17;Los Angeles.Piscataway(NJ):IEEE Press;2016.
38.Flores GR,Escareno J,Lozano R,Salazar S.Quad-tilting rotor convertible mav:Modeling and real-time hover flight control.Journal of Intelligent&Robotic Systems2012;65(1-4):457–71.
39.Flores GR,Lozano R.Transition flight control of the quad-tilting rotor convertible MAV.Proceedings of the 2013 international conference on unmanned aircraft systems;2013 May 28-31;Atlanta.Piscataway(NJ):IEEE Press;2013.
40.Flores G,Lozano R.A nonlinear control law for hover to level flight for the quad tilt-rotor uav.Proceedings of the 19th world congress the international federation of automatic control;2014 Aug 24-29;Cape Town,South Africa.Vienna,Austria:IFAC;2014.
41.Carlson EB.Optimal tiltrotor aircraft operations during power failure[dissertation].Minneapolis:University of Minnesota;1999.
42.Ta DA,Fantoni I,Lozano R.Modeling and control of a tilt trirotor airplane.Proceedings of the American control conference;2012 Jun 27-29;Montre´al,Canada.Boston:ACC;2012.
43.Wang Y.Control system research on the VTOL stage of quad tilt rotor UAV[dissertation].Harbin:Harbin Institute of Technology;2013[Chinese].
44.Fang XX,Lin Q,Wang Y,Zeng LL.Control strategy design for the transitional mode of tiltrotor.Proceedings of the 2012 10th IEEE international conference on industrial informatics;2012 Jul 25-27;Beijing.Piscataway(NJ):IEEE Press;2012.
45.O’Gorman R,Abbott C.Remote control war-Unmanned combat air vehicles in China,India,Israel,Iran,Russia and Turkey.London:Bloomsbury;2013.p.51–2.
46.Dickeson JJ,Miles D,Cifdaloz O,Wells VL,Rodriguez AA.Robust LPVH∞gain-scheduled hover-to-cruise conversion for a tilt-wing rotorcraft in the presence of CG variations.Proceedings of the 2007 46th IEEE conference on decision and control;2007 Dec 12-14;New Orleans.Piscataway(NJ):IEEE Press;2007.
47.Zhao W,Underwood C.Robust transition control of a Martian coaxial tiltrotor aerobot.Acta Astronautica2014;99(1):111–29.
48.Kim BM,Choi K,Kim BS.Trajectory tracking controller design using neural networks for tiltrotor UAV.Proceedings of the AIAA guidance,navigation and control conference and exhibit;2007 Aug 20-23;Hilton Head.Reston:AIAA;2007.
49.Cao YY,Chen RL.Investigation on nacelle conversion envelope analysis method of tiltrotor aircraft.J Aerosp Power2011;26(10):2174–80.
50.Ferguson SW.A mathematical model for real time flight simulation of a generic tilt rotor aircraft.Washington,D.C.:NASA;1988.Report No.:NASA CR-166536.
51.Dong LH.Research on aeroelastic dynamics of tiltrotor-wing coupled system[dissertation].Nanjing:Nanjing University of Aeronautics and Astronautics;2011[Chinese].
52.Cao YY.Research on mathematical modeling method for tilt rotor aircraft flight dynamics[dissertation].Nanjing:Nanjing University of Aeronautics and Astronautics;2012[Chinese].
53.Cai G,Chen BM,Lee TH.Unmanned rotorcraft systems.Berlin:Springer Science&Business Media;2011.p.98–102.
54.Pounds P,Mahony R,Corke P.Modelling and control of a large quadrotor robot.Control Eng Pract2010;18(7):691–9.
55.Klein GD.Linear modeling of tiltrotor(in helicopter and airplane mode)for stability analysis and preliminary design[dissertation].Monterey:Naval Postgraduate School;1996.
56.Barkai SM,Rand O,Peyran RJ,Carlson RM.Modeling and analysis of tilt-rotor aeromechanical phenomena.Mathl Gomput Modelling1998;27(12):17–43.
57.Li H,Qu X,Wang W.Multi-body motion modeling and simulation for tilt rotor aircraft.Chinese J Aeronaut2010;23(4):415–22.
58.Kleinhesselink KM.Stability and control modeling of tiltrotor aircraft[dissertation].City of College Park:University of Maryland;2007.
59.Kendoul F,Fantoni I,Lozano R.Modeling and control of a small autonomous aircraft having two tilting rotors.IEEE Transactions on Robotics2006;22(6):1297-302.
60.Sanchez A,Escareno J,Garcia O,Lozano R.Autonomous hovering of a noncyclic tiltrotor UAV:Modeling,control and implementation.Proceedings of the IFAC world congress;2008 Jul 6-11:Seoul,Korea.Vienna,Austria:IFAC;2008.
61.Mettler B,Tischler MB,Kanade T.System identification of smallsize unmanned helicopter dynamics.Proceedings of the annual forum proceedings-American helicopter society;1999 May 25-27;Montreal,Canada.Fairfax(VA):American Helicopter Society;1999.
62.Fu QT.Study on mechanism and system identification modeling of unmanned tilt-rotor aircraft[dissertation].Nanjing:Nanjing University of Aeronautics and Astronautics;2011[Chinese].
63.Tischler MB,Tischler MB.Frequency-response identification of XV-15 tilt-rotor aircraft dynamics.Washington,D.C.:NASA;1987.NASA Technical Memorandum.
64.Chen CT.Linear system theory and design.3rd ed.Oxford:Oxford University Press,Inc.;1995.p.231–68.
65.Camacho EF,Alba CB.Model predictive control.Berlin:Springer Science&Business;2013.p.1–12.
66.Mehra RK,Prasanth RK,Bennett RL,Neckels M,Wasikowski M.Model predictive control design for XV-15 tilt rotor flight control.Proceedings of the AIAA guidance,navigation,and control conference and exhibit;2001 Aug 6-9;Montreal,Canda.Reston:AIAA;2001.
67.Mehra RK,Prasanth RK,Gopalaswamy S.XV-15 tiltrotor flight control system design using model predictive control.Proceedings of the aerospace conference;1998.Piscataway(NJ):IEEE Press;1998.
68.Kvaternik RG,Piatak DJ,Nixon MW,Langston CW,Singleton JD,Bennett RL,et al.An experimental evaluation of generalized predictive control for tiltrotor aeroelastic stability augmentation in airplane mode of flight.J Am Helicopter Soc2002;47(3):198–208.
69.Kendoul F.Survey of advances in guidance,navigation,and control of unmanned rotorcraft systems.J Field Robot2012;29(2):315–78.
70.Niu ZG,Zhang JM.Method of smooth-switch fuzzy PID for linear motor control.Chinese Society for Electrical Engineering2006;26(8):132–6.
71.Leith DJ,Leithead WE.Survey of gain-scheduling analysis and design.Int J Control2000;73(11):1001–25.
72.Teng WF,Pan HP,Ren J.Neural network PID decoupling control based on chaos particle swarm optimization.Proceedings of the 33rd Chinese control conference;2014 Jul 28-30;Nanjing.Beijing:TCCT,CAA;2014.
73.Peng C,Wang XM,Chen X.Design of tiltrotor flight control system in conversion mode using improved neutral network PID.Advanced Materials Research2013;850–851:640–3.
74.Rysdyk RT,Calise AJ.Adaptive model inversion flight control for tilt-rotor aircraft.J Guid Control Dyn1999;22(3):402–7.
75.Yu C,Zhu J,Sun Z.Nonlinear adaptive internal model control using neural networks for tilt rotor aircraft platform.Proceedings of the 2005 IEEE mid-summer workshop on soft computing in industrial applications;2005 Jun 28-30;Helsinki,Finland.Piscataway(NJ):IEEE Press;2005.
3 May 2016;revised 26 July 2016;accepted 13 September 2016
Available online 21 December 2016
Ⓒ2016 Chinese Society of Aeronautics and Astronautics.Production and hosting by Elsevier Ltd.This is anopenaccessarticleundertheCCBY-NC-NDlicense(http://creativecommons.org/licenses/by-nc-nd/4.0/).
*Corresponding author.
E-mailaddresses:liuzhong@sia.cn (Z.Liu),heyuqing@sia.cn(Y.He),yangliying@sia.cn(L.Yang),jdhan@sia.cn(J.Han).
Peer review under responsibility of Editorial Committee of CJA.
 CHINESE JOURNAL OF AERONAUTICS2017年1期
CHINESE JOURNAL OF AERONAUTICS2017年1期
- CHINESE JOURNAL OF AERONAUTICS的其它文章
- Anti-plane problem of four edge cracks emanating from a square hole in piezoelectric solids
- Stress analysis and damage evolution in individual plies of notched composite laminates subjected to in-plane loads
- Drilling load modeling and validation based on the filling rate of auger flute in planetary sampling
- An adaptive attitude algorithm based on a current statistical model for maneuvering acceleration
- Spacecraft attitude maneuver control using two parallel mounted 3-DOF spherical actuators
- Angular velocity determination of spinning solar sails using only a sun sensor