基于无人机DEM的灌区渠系提取方法
2017-11-15 09:29:15张宏鸣韩文霆宁纪锋王美丽
农业机械学报 2017年10期
张宏鸣 李 瑶 王 猛 韩文霆 宁纪锋 王美丽
(1.西北农林科技大学信息工程学院,陕西杨凌 712100; 2.西北农林科技大学机械与电子工程学院,陕西杨凌 712100)
基于无人机DEM的灌区渠系提取方法
张宏鸣1李 瑶1王 猛1韩文霆2宁纪锋1王美丽1
(1.西北农林科技大学信息工程学院,陕西杨凌 712100; 2.西北农林科技大学机械与电子工程学院,陕西杨凌 712100)
大范围灌区渠系的制图对于现代节水灌溉技术以及合理配水、安全输水具有重要意义。但目前所获得的灌区遥感影像分辨率不高,渠系提取较难。本文以无人机航空摄影测量获得的数字高程模型(DEM)为基础,根据渠系特征,使用灌区坡度数据,采用改进的霍夫变换方法,实现了对灌区渠系网络的提取。与面向对象、监督分类方法和手绘结果进行对比,该方法提取的渠系连续、提取完整度可达85.61%。误差主要集中在无衬渠系中土壤沉积较多(坡度变化不明显)的位置以及相交渠系处理时保留渠堤位置而造成。该方法根据灌区地形特征,基于高精度高程数据进行渠系提取,是数字地形分析结合图像处理在精细农业中的一次有益探索。
灌溉渠系; 数字高程模型; 无人机遥感; 数字地形分析
引言
随着农业灌溉中水资源短缺问题的日益加剧,精准灌溉成为研究重点[1]。在灌溉排水过程中,渠系是输送能力最大、成本最低、综合功能最突出的工程设施[2],如何准确并快速地提取渠系、完成渠系制图成为灌区管理的一个难点。而现有的灌区渠系识别研究中,主要以中低分辨率的遥感数据为主,受精度的限制,准确率较低。
通常渠系可分为自然渠系和人工渠系[3]。自然渠系通常由地表径流汇流形成,该类渠系多通过数字高程模型(Digital elevation model,DEM)的汇流计算获得[4]。METZ等[5]对LCP(Least cost path)算法[6]进行改进,极大地降低了渠系提取的时间和空间复杂度;CAVALLI等[7]基于等值线[8]以及坡度变化阈值方法完成复杂地形中自然渠系的半自动化提取。SCHWANGHART等[9]改进了Carving algorithm算法,并结合Least cost auxiliary topography(LCAT)方法[10]完成低地势山区中渠系的提取,然而该方法在算法初期需要人为提供大量准确的渠系位置信息。但灌区干渠、支渠等渠床大部分低于耕地,因此以上汇水方法较难在灌区的人工渠系中应用。
对于人工渠系,按照渠系级别,可分为干、支、斗、农、毛等多级。现有的研究方法主要分为对遥感影像及DEM两种数据源进行处理。吴健生等[11]、乔哲贤等[12]、张超等[13]、顾振伟等[14]分别采用面向对象、边缘检测以及遥感影像和边缘检测相结合的方式进行分析。然而遥感影像分辨率不足,无法识别宽度较小的农、毛渠,且在少水或无水的条件下较难获得渠系信息。边缘检测算法对提取物的长度较为敏感,无法提取长度较短的渠系。韩文霆等[15]使用基于面向对象的特征组合分类分层方法对灌区渠系进行提取,但针对结果中出现的断开以及渠系与道路分布相似所造成的错误提取等问题并未给出很好的解决办法。从地形差异性角度,鉴于DEM数据比影像能更好地表达地形高低起伏的信息[16],因此CAZORZI等[17]基于光学雷达(Light detection and ranging)获得DEM,使用平滑过的DEM与原始DEM做差,得到相对地形模型信息,同时设置相应的阈值来得到一个小范围的渠系信息。HUTTUNEN[18]认为CAZORZI的方法会产生多余的地形信息,并且算法的应用区域受限,因此使用稀疏逻辑回归以及多项式模型的方法完成沼泽地区中渠系的提取,但该方法较为耗时。RAPINEL等[19]使用面向对象方法对渠系进行识别,基于LiDAR高程数据,与eCognition软件结合,完成渠系的提取。但水域以及植被的存在都会对结果产生较大的影响。
随着无人机技术的不断发展,高精度地形数据的获取成为可能[15]。本文针对以上研究方法中数据精度不高、识别精度不高以及人工干预较多等问题,基于无人机获取灌区正射影像及DEM,结合灌区渠系特征,生成坡度数据,应用改进的霍夫变化方法,连接断点并提取线性渠系,同时以手绘渠系为标准,与前人研究中[11,12,15,20]使用的面向对象方法以及监督分类方法进行对比。
1 数据来源与研究区域
1.1 数据来源
本研究使用的数据拍摄于2016年3月,通过无人机拍摄的立体像对,基于AgisoftPhotoscan软件,获取该区域DEM[21]。无人机型号为AF1000 UAV(图1),它是MAVinci固定翼飞机,翼展2.7 m,速度为14 m/s。拍摄时,无人机每飞行一次可获得约1 000幅航拍图像,在飞行前使用华策实时动态定位(Real-time kinematic,RTK)接收机测量了5个地面检查点(Ground check points,GCPs),RTK是一种GPS工具,用于确定当前飞行的位置和海拔高度,精度高达1 cm[22]。RTK使用GPS与参照点相结合来确定位置,每个位置的地形特征都不尽相同,因此GCPs须分布在不同位置来进行误差评估。数据获取基于西安80地理坐标系。

图1 UAV装备Fig.1 Equipment of UAV
1.2 研究区域特征
研究区域位于内蒙古西部临河区海丰县,地处黄土高原北部(图2a),全境为黄河冲击平原,地面开阔平坦,隶属河套灌区,灌区内灌排系统纵横。为减小试验区地表覆盖物的影响,在接近无植被覆盖的河套灌区冻土期,进行无人机飞行及数据采集,生成分辨率为0.25 m地表高程数据。图2是研究区域位置、高程。由于拍摄时几乎没有地表植被,因此可近似看作DEM。本文从研究区中选择3块包含渠系的区域(图2b),其中测试区1仅有渠系信息,测试区2包含房屋以及渠系信息,测试区3包含房屋、道路及渠系信息。测试区1、2用于算法测试及修正,测试区3用于算法改进后的验证。3个区域坡度数据分别如图3所示。
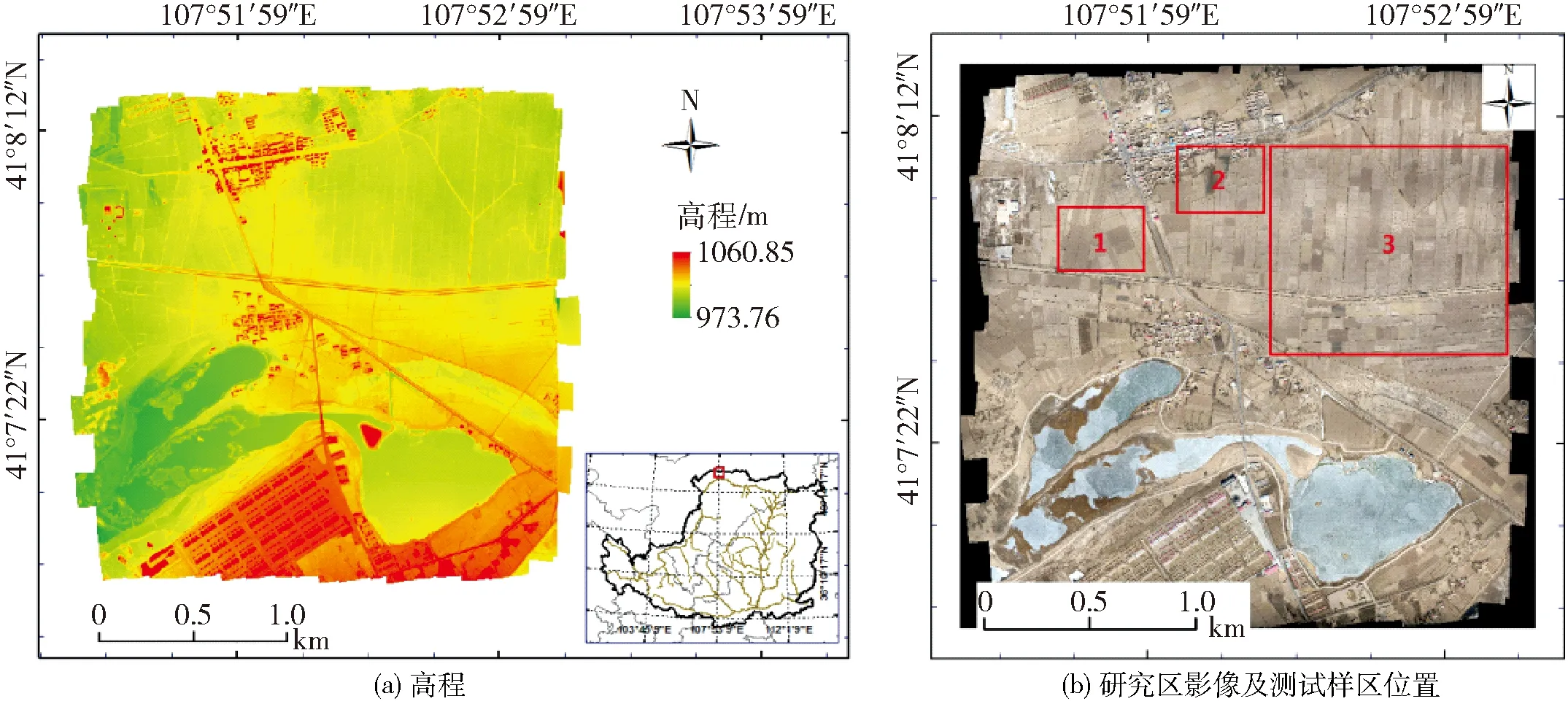
图2 研究区域高程、影像及测试样区位置Fig.2 DEM, RGB image and location of test area
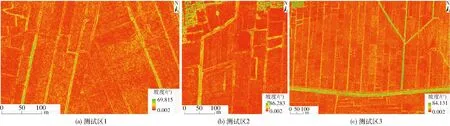
图3 各测试区坡度信息Fig.3 Slope information of test areas
一般在土地整理规划时不考虑毛渠,同时鉴于数据分辨率的限制,本文未对渠宽小于1 m的毛渠进行提取及验证。在所选研究区中,根据渠系情况,可分为两类:有衬渠系(支渠、斗渠)(图4a),渠系高程变化较明显;无衬渠系(农毛渠)(图4b),侵蚀沉积较强烈,不易识别。

图4 渠系类型Fig.4 Two types of irrigation networks
渠系高程切面示意图以及对应的坡度切面示意如图5所示。在图5b中道路部分的坡度变化几乎为零,而渠堤和渠床坡度变化则比较明显。通过对数据进行分析,无人机影像、高程中渠系与大部分道路的颜色区分度较小,很难直接通过影像或者高程将二者区分开。由于渠堤与渠床的高度差导致渠系坡度[23]具有明显的4个峰值变化(图5b),而道路与农地之间的坡度变化较弱。本文尝试通过坡度转换,剔除其他线状物体(如道路、田块)对渠系提取的影响。本文用于渠系提取的测试数据包括影像、DEM和坡度。

图5 渠系横截面示意图Fig.5 Cross section diagrams of drainage
2 改进霍夫变换的渠系提取方法
2.1 渠系提取算法
本文渠系提取方法的主要流程包括坡度转换、坡度数据灰度处理、二值化、去噪、膨胀、边缘检测和改进的霍夫变换等步骤(图6)。
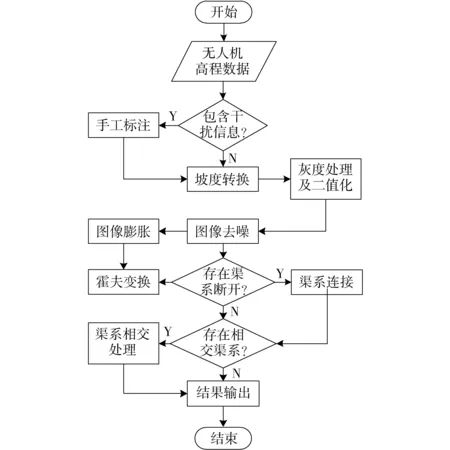
图6 方法流程图Fig.6 Flow chart of method
霍夫变换是从图像中识别出具有相同几何形状的基本方法之一[24-25],该识别过程利用了一种图像空间到参数空间的映射关系[26-27]。
在二维坐标系中,通过点(x,y)的直线表达式为
y=kx+b
(1)
但是该表达式无法表示出斜率不存在即垂直于轴的直线,因此对于这个问题引入了极坐标表达方式,即
ρ=xcosθ+ysinθ
(2)
式(2)中ρ表示直线到原点的距离,θ为线与x轴的夹角。把直线从平面坐标映射到极坐标的关系如图7所示,霍夫变换即为在参数空间中计算累计结果的局部最大值,从而得到符合条件的集合[25]。

图7 xy空间到参数空间的映射关系Fig.7 Relation between xy space and parameter space
2.2 算法改进
将基本霍夫变换应用于渠系提取后出现2个问题:原本应连续的渠系出现了断开(图8a);将DEM数据进行坡度转换之后,会出现如图5b所示的4个坡度峰值变化,因此在提取时会出现多条渠系相交现象(图8b),而本文只需要使用一条渠系来表示出该位置的渠系信息即可。为此,提出了以下解决方法。

图8 基本霍夫变换结果Fig.8 Result of Hough transform
渠系断开是由于渠堤和渠床变化不够明显导致,而通常该类渠系具有相同的斜率。因此可通过对霍夫变换的结果进行遍历,获取每一条线段的θ属性,从而判断两线段是否断开,若断开则对两条线段的4个点进行寻找,分别记录横坐标的较小值以及纵坐标的较大值,从而重新绘制出整条渠系。
渠系相交是由于数据经过边缘检测[28-29]、图像膨胀[30]操作之后表现为多像素连接的带状区域以及坡度数据的4个峰值变化。本文采用几何方法对该问题进行处理。一般渠系的相交分为两种情况:一条渠系的两端分别位于另外一条渠系的两侧(图9a);有一点位于渠系上(图9b)。在代数几何中已知直线的2个端点P1(x1,y1)和P2(x2,y2),当斜率存在时,直线的表达式可以用两点式表示为

(3)
此时y2≠y1且x2≠x1,将式(3)进行转化得
(y-y1)(x2-x1)-(x-x1)(y2-y1)=0
(4)
其中y2-y1以及x2-x1均固定,若另外一条线段的两端分别在该线段的两侧,或者其中一点在该线段上,那么式(4)的结果必然一个大于等于零,一个小于等于零,即两者的乘积小于等于零,如果两条线段满足相交情况并且斜率之差的绝对值在某个阈值范围内,则可认为这两条线段提取的是同一个区域。分别使用

(5)
计算两条渠系的长度,且选取较长的一条作为该区域的代表渠系。

图9 渠系相交情况分类Fig.9 Two types of crossing irrigation networks
经过断点连接以及相交渠系处理后,区域1、2的最终结果如图10所示。显然,渠系的断点以及相交问题得到了有效解决。

图10 改进霍夫变换结果Fig.10 Result of improved Hough transform
2.3 结果对比
为验证改进霍夫变换方法的渠系提取效果,本文对前人使用的相关方法进行整理和总结,发现大多使用监督分类[20]以及面向对象分类[11,15]方法完成渠系提取或者以这两种方法作为对比算法。因此本研究以手工绘制渠系为基础,将不同方法应用于无人机正射影像和坡度数据,分析不同方法识别渠系的完整度以及错误率。本文根据道路提取算法的精度分析研究[11,31],将渠系提取的完整度定义为

(6)
错误率定义为

(7)
式中r——与手绘渠系相比较正确的像素点数量
e——错误识别的像素点数目
A——手绘渠系的像素点数
M——该种算法所识别出来的总像素点数
本文的面向对象分类法以及监督分类方法提取渠系的过程借助于ENVI软件完成,面向对象分类法的主要步骤为影像分割、特征提取、规则建立及分类、后处理等过程,根据前人经验以及研究区域特征,建立相应的规则,最后为减少提取结果中出现的干扰点,使用Majority/Minority Analysis消除某些孤立的噪声,提取结果如图11a、11b;监督分类方法的主要步骤为样本选择、分类器选择(本文使用最大似然分类法)、影像分类以及分类后处理等步骤,结果如图11c、11d。将不同方法的提取结果提取保存为文本数据,同时以手绘渠系为基础,采用逐像素遍历方式统计对应像素数目。在实际中,由于毛渠渠堤的宽度一般大于0.5 m,因此在结果对比中,距手绘位置处0.5 m以内的皆认为在误差许可范围内。统计后的结果如表1所示。

图11 不同算法的结果比较Fig.11 Comparisons of results of different algorithms

表1 算法结果对比Tab.1 Comparison of three different algorithms
3 结果与讨论
不同方法的提取效果如图11所示,对应各个方法提取的完整度以及错误率计算结果如表1,结果表明:
(1)使用面向对象方法对影像数据处理的渠系提取完整度为58.70%,优于完整度为53.26%的坡度数据,然而由于地面堆肥、翻耕等异常点的影响(图11a,11b),使得两种方法的错误提取率达到66%以上。通常基于面向对象方法提取渠系多为渠系有水条件下的光谱影像,通过光谱特征与其他地表物体的差异性来进行区分,在渠系少水甚至无水条件下,识别率很低。本文的影像数据只包含RGB 3个波段,即渠系的光谱信息与其他物体的区分度较小,因此该方法的结果不够理想,具有很大的局限性。
(2)监督分类方法对坡度数据处理的完整度为85.24%,优于影像数据,然而错误率却高达76.44%。影像数据受地表颜色干扰较大,部分秸秆焚烧后的地表颜色使得该方法对影像数据提取易受到相似颜色的地物影响,错误率很大。该方法需要提前选择具有代表性的样本参数,并以此为基础进行特征分类,因此训练区域越典型其识别效果越好,而坡度数据中因包含有丰富的色彩信息,所以在进行样本区域选择时,坡度数据的样本选择比影像数据具有较好的代表性,受到其他地物干扰较少,因此错误率较低。
(3)基于改进霍夫变换方法的识别精度最高,完整度达85.61%,错误率为18.92%。由于本文方法考虑了渠系的线性特征,同时根据地形,以坡度数据为计算基础,因此在准确率上优于其他两种方法。误差主要是由于部分无衬渠系泥沙沉积过多,导致坡度变化特征不够明显,因此不易识别;交叉渠系在剔除时,由于保留的位置多为渠堤位置,会存在误差。但提取结果能够将大部分干扰因素剔除,获得较纯粹的渠系信息,因此在渠系提取中该方法具有可推广性及适用性。
综上所述,面向对象方法对于无人机正射影像数据准确率低于监督分类方法,但两种方法易受到其他噪声影响,错误提取率过高,因此正射影像不适合提取渠系。对于DEM数据,提取坡度后采用3种方法的处理结果表明,改进霍夫变换方法优于面向对象方法以及监督分类方法,因此适宜进行渠系提取。
4 结论
(1)无人机航空摄影测量方法获取的高程数据可用于渠系提取,但原始数据较难区分道路以及不带衬的渠系信息,进行坡度转换后能够过滤掉部分田间道路和干扰信息。
(2)使用面向对象方法分别对影像数据和坡度数据进行处理,从提取完整度而言,影像数据的优于坡度数据,主要原因为面向对象方法的原理是根据不同光谱区间来识别不同对象,而坡度数据中光谱特征单一,因此提取效果较差。对监督分类方法而言,影像数据和坡度数据的差别不大,然而坡度数据的错误率远低于影像数据。主要原因为影像数据中渠系与周围非渠系地物差别很小,从而误将很多其他非渠系信息识别为渠系。从人工干预程度而言,面向对象方法在处理过程中需要根据渠系的分布特征,添加属性从而进行对象筛选,监督分类方法需提前规划出训练样本,并以选取的样本为基础进行特征提取。
(3)改进霍夫变换能够在渠系提取过程中很好地解决渠系断开以及相交问题,且仅含有渠系信息,渠系提取的完整度可达85.61%,优于面向对象和监督分类方法。同时在提取过程中无过多的人为干预,自动化程度较高,未成功提取的误差主要集中在渠系坡度变化不明显的位置以及在处理相交渠系时,最终保留的渠系多为渠堤位置而造成的误差。从准确度以及人工干预角度讲,本文的改进霍夫变换方法均优于面向对象以及监督分类方法,是灌区渠系提取方法的一次有效探索。
2 SANG G, CAO S, GUO R, et al.Optimization of cost per day of cascade pumping station water-delivery system[J].Journal of Drainage & Irrigation Machinery Engineering,2013, 31(8): 688-695.
3 王小军,张强,易小兵,等.灌区渠系特征与灌溉水利用系数的Horton分维[J].地理研究, 2014, 33(4): 789-800.
WANG Xiaojun, ZHANG Qiang,YI Xiaobing, et al.Study on the Horton fractal dimension with the irrigation canal system characteristics and effective utilization coefficient of irrigation water[J].Geographical Research, 2014, 33(4): 789-800.(in Chinese)
4 ZHANG H, YAO Z, YANG Q, et al.An integrated algorithm to evaluate flow direction and flow accumulation in flat regions of hydrologically corrected DEMs[J].Catena, 2017, 151: 174-181.
5 METZ M, MITASOVA H, HARMON R S.Efficient extraction of drainage networks from massive, radar-based elevation models with least cost path search[J].Hydrology and Earth System Sciences,2011, 15(2): 667-678.
6 EHLSCHLAEGER C R.Using the AT search algorithm to develop hydrologic models from digital elevation data[C]∥Proceedings of the International Geographic Information System (IGIS) Symposium, Baltimore, MD, 1989.
7 CAVALLI M, TREVISANI S, GOLDIN B, et al.Semi-automatic derivation of channel network from a high- resolution DTM: the example of an Italian alpine region[J].European Journal of Remote Sensing, 2013, 46(1):152-174.
8 TARBOTON D G.Advances in the mapping of flow networks from digital elevation data[J].American Society of Civil Engineers, 2014, 23(4): 107-111.
9 SCHWANGHART W, GROOM G, KUHN N J, et al.Flow network derivation from a high resolution DEM in a low relief, agrarian landscape[J].Earth Surface Processes and Landforms, 2013, 38(13):1576-1586.
10 SOILLE P, VOGT J, COLOMBO R.Carving and adaptive drainage enforcement of grid digital elevation models[J].Water Resources Research, 2003, 39(12): 1366-1379.
11 吴健生,刘建政,黄秀兰,等.基于面向对象分类的土地整理区农田灌排系统自动化识别[J].农业工程学报, 2012, 28(8): 25-31.
WU Jiansheng,LIU Jianzheng,HUANG Xiulan,et al.Automatic identification of irrigation and drainage system in land reclamation area based on object-oriented classification[J].Transactions of the CSAE, 2012, 28(8): 25-31.(in Chinese)
12 乔贤哲,张超,杨建宇,等.高分辨率遥感影像中农田灌溉设施的提取[J].测绘通报,2012(增刊1): 372-374.
QIAO Xianzhe,ZHANG Chao,YANG Jianyu, et al.Extraction of farmland irrigation facilities in high resolution remote sensing images[J].Bulletin of Surveying and Mapping, 2012(Supp.1): 372-374.(in Chinese)
13 张超,王志浩,杨建宇,等.基于Canny算子的农田线状工程地物自动提取方法[J/OL].农业机械学报, 2015, 46(2): 270-275.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20150239&flag=1.DOI:10.6041/j.issn.1000-1298.2015.02.039.
ZHANG Chao, WANG Zhihao,YANG Jianyu,et al.Farmland linear project feature auto-extraction method based on Canny algorithm[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2015, 46(2): 270-275.(in Chinese)
14 顾振伟,张超,杨建宇,等.基于高分辨率遥感影像的灌排沟渠提取方法[J].农业工程,2014, 4(3): 64-67.
GU Zhenwei,ZHANG Chao,YANG Jianyu,et al.Method of extracting irrigation and drainage ditches based on high remote sensing image[J].Agricultural Engineering, 2014, 4(3): 64-67.(in Chinese)
15 韩文霆,张立元,张海鑫,等.基于无人机遥感与面向对象法的田间渠系分布信息提取[J/OL].农业机械学报, 2017, 48(3): 205-214.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170326&flag=1.DOI:10.6041/j.issn.1000-1298.2017.03.026.
HAN Wenting,ZHANG Liyuan,ZHANG Haixin,et al.Extraction method of sublateral canal distribution information based on UAV remote sensing[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 205-214.(in Chinese)
16 刘凯,汤国安,黄骁力,等.面向地形特征的DEM与影像纹理差异分析[J].地球信息科学学报, 2016, 18(3): 386-395.
LIU Kai,TANG Guoan,HUANG Xiaoli,et al.Research on the difference between textures derived from DEM and remote-sensing image for topographic analysis[J].Journal of Geo-Information Science, 2016, 18(3): 386-395.(in Chinese)
17 CAZORZI F, FONTANA G D, LUCA A D, et al.Drainage network detection and assessment of network storage capacity in agrarian landscape[J].Hydrological Processes,2013, 27(4): 541-553.
18 HUTTUNEN H.Sparse logistic regression and polynomial modelling for detection of artificial drainage networks[J].Remote Sensing Letters, 2015, 6(4):311-320.
19 RAPINEL S, HUBERT-MOY L, CLÉMENT B, et al.Ditch network extraction and hydrogeomorphological characterization using LiDAR-derived DTM in wetlands[J].Hydrology Research, 2014, 46(2):276-290.
20 许迪,李益农,蔡林根,等.卫星遥感影像在农田灌排系统识别中的应用研究[J].农业工程学报, 2004, 20(2): 36-39.
XU Di,LI Yinong,CAI Lin’gen,et al.Applied study of satellite image in identification of irrigation and drainage system[J].Transaction of the CSAE, 2004, 20(2): 36-39.(in Chinese)
21 BARRETTE J, AUGUST P, GOLET F.Accuracy assessment of wetland boundary delineation using aerial photography and digital orthophotography[J].Photogrammetric Engineering & Remote Sensing,2000, 66(4): 409-416.
22 GAN-MOR S, CLARK R L, UPCHURCH B L.Implement lateral position accuracy under RTK-GPS tractor guidance[J].Computers & Electronics in Agriculture,2007, 59(1-2): 31-38.
23 张宏鸣,宋泽鲁,杨江涛,等.DEM超分辨率重构对梯田坡度提取的影响研究[J/OL].农业机械学报, 2017, 48(1):112-118.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170115&flag=1.DOI:10.6041/j.issn.1000-1298.2017.01.015.
ZHANG Hongming,SONG Zelu,YANG Jiangtao,et al.Influence of DEM super-resolution reconstruction on terraced field slope extraction[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 112-118.(in Chinese)
24 黄琦,张国基,唐向京,等.基于霍夫变换的图像运动模糊角度识别法的改进[J].计算机应用, 2008, 28(1): 211-213.
HUANG Qi,ZHANG Guoji,TANG Xiangjing,et al.Improvement of motion blurred direction identification based on Hough transform[J].Journal of Computer Applications, 2008, 28(1): 211-213.(in Chinese)
25 DUAN R, WEI Z, HUANG S, et al.Fast line detection algorithm based on improved Hough transformation[J].Chinese Journal of Scientific Instrument, 2010, 31(12): 2774-2780.
26 陈小艳,王强,李柏林.改进的Hough变换检测圆方法[J].计算机系统应用, 2015, 24(8): 197-201.
CHEN Xiaoyan,WANG Qiang,LI Bolin.Improved Hough algorithm for circle detection[J].Computer Systems & Applications,2015, 24(8): 197-201.(in Chinese)
27 RIVEIRO B, GONZLEZ-JORGE H, MARTNEZ-SNCHEZ J, et al.Automatic detection of zebra crossings from mobile LiDAR data[J].Optics & Laser Technology, 2015, 70: 63-70.
28 杨秋菊,肖雪梅.基于改进Canny特征点的SIFT算法[J].计算机工程与设计, 2011, 32(7): 2428-2431.
YANG Qiuju,XIAO Xuemei.Improved SIFT algorithm based on Canny feature points[J].Computer Engineering and Design, 2011, 32(7): 2428-2431.(in Chinese)
29 钮圣虓,王盛,杨晶晶,等.完全基于边缘信息的快速图像分割算法[J].计算机辅助设计与图形学学报, 2012, 24(11): 1410-1419.
NIU Shengxiao, WANG Sheng, YANG Jingjing, et al.A fast image segmentation algorithm fully based on edge information[J].Journal of Computer-Aided Design & Computer Graphics, 2012, 24(11): 1410-1419.(in Chinese)
30 邓仕超,黄寅.二值图像膨胀腐蚀的快速算法[J].计算机工程与应用,2017, 53(5):207-211.
DENG Shichao,HUANG Yin.Fast algorithm of dilation and erosion for binary image[J].Computer Engineering and Applications, 2017, 53(5):207-211.(in Chinese)
31 曾静静,卢秀山,王健,等.基于LIDAR回波信息的道路提取[J].测绘科学,2011, 36(2): 142-143.
ZENG Jingjing, LU Xiushan, WANG Jian, et al.Research of spatial structure and differentiation pattern of housing price in Xi’an based on ESDA and geostatistical analysis[J].Science of Surveying and Mapping, 2011, 36(2): 142-143.(in Chinese)
ExtractionMethodofIrrigationNetworksinIrrigatedAreaBasedonUAVDEM
ZHANG Hongming1LI Yao1WANG Meng1HAN Wenting2NING Jifeng1WANG Meili1
(1.CollegeofInformationEngineering,NorthwestA&FUniversity,Yangling,Shaanxi712100,China2.CollegeofMechanicalandElectronicEngineering,NorthwestA&FUniversity,Yangling,Shaanxi712100,China)
Mapping of irrigation networks in large-scale irrigation districts is very important for the development of modern water-saving irrigation technology, at the same time, it is also important for allocating water reasonably and supplying water safely.However, due to the low resolution of the remote sensing images currently, it is very difficult to extract the irrigation networks in detail.Based on the slope data generated from digital elevation model (DEM) which was obtained from the unmanned aerial vehicle (UAV) aerial photogrammetry collected in March, 2016, and combined the characteristics of irrigation networks, a revised hough transform (RHT) method was adopted, which realized the fast extraction of irrigation networks.Compared with the object-oriented method, supervised-classification method and the field measurement results, the integrity of RHT method can reach about 85.61%.Errors were mainly concentrated in the non liner cannal part, which existed more sediment deposition (slope was not obvious), and also in the cannal dike when unneceassary parallel or crossed cannal were eliminated.According to the characteristics of irrigation networks, the research result was a beneficial exploration for the study of artificial irrigation network system, which was based on the high-resolution DEMs.
irrigation network system; digital elevation model; unmanned aerial vehicle remote sensing; digital terrain analysis
10.6041/j.issn.1000-1298.2017.10.020
S157; TP79
A
1000-1298(2017)10-0165-07
2017-04-23
2017-07-20
国家重点研发计划项目(2017YFC0403203)、国家自然科学基金项目(41771315、41301283、41371274、61402374、41301507)、欧盟地平线2020研究与创新计划项目(GA:635750)、黄土高原土壤侵蚀与旱地农业国家重点实验室开放课题项目(A314021402-1702)、陕西省自然科学基础研究计划项目(2016JM6038)和西北农林科技大学基本科研业务费专项资金项目(2452015060)
张宏鸣(1979—),男,副教授,博士,主要从事空间大数据管理与区域土壤侵蚀评价研究,E-mail: zhm@nwsuaf.edu.cn
猜你喜欢
水利科技与经济(2022年11期)2022-12-02 01:52:34
中外文摘(2022年8期)2022-05-17 09:13:36
中老年保健(2021年4期)2021-08-22 07:10:04
电子测试(2018年15期)2018-09-26 06:01:34
水利技术监督(2017年6期)2017-12-19 13:28:21
电测与仪表(2017年24期)2017-12-19 05:15:24
水利技术监督(2017年3期)2017-06-09 06:55:34
水利科技与经济(2016年6期)2016-04-22 05:08:12
现代计算机(2016年12期)2016-02-28 18:35:25
电测与仪表(2015年8期)2015-04-09 11:50:28