基于CAN通讯的汽车电控驻车技术策略研究
2017-11-14 06:35许炳照张荣贵苏庆列
长春工程学院学报(自然科学版) 2017年3期
许炳照,张荣贵,苏庆列
(福建船政交通职业学院汽车运用工程系,福州 350007)
基于CAN通讯的汽车电控驻车技术策略研究
许炳照,张荣贵,苏庆列
(福建船政交通职业学院汽车运用工程系,福州 350007)
为研究车辆电控驻车制动系统的控制方法,设计一种永磁式无刷直流电机驻车制动系统及其通讯结构,在分析电控驻车执行器结构、工作原理和动力学特性的基础上,提出基于CAN通讯的驻车执行策略和约束条件,结合运用 ESP 要求的驻车主动安全技术,为电控驻车制动系统的硬件和软件设计提供一种参考方案。
ECPB设计;CAN通讯;驻车控制
0 引言
汽车ECPB(Electrical Controlled Park Brake)执行器及其控制系统的功用是用来替代机械式手刹装置,实现车辆临时性驻车和长期性停车的电子控制,可避免坡道起步溜车或忘记拉手刹等情况的风险。在欧洲,由于市场对驻车便利性需求较大,所以ECPB系统在欧洲切入较快,装配ECPB的车辆占相当大的比例。国内的这项技术不是很成熟,许多国产车辆都没有进行该项新技术装置的安装,出售的安装有该系统的汽车基本都不是国产的,我们没有这项技术的知识产权。在此,围绕汽车ECPB的可行方案展开研究,首先提出不同的设计方案,经比较,认为永磁式无刷直流电机应用在ECPB系统上可以较好地实现汽车线控制动技术,在对系统执行机构主要参数进行分析和验算后,对电机进行匹配与试验(另文介绍);其次是选择ECPB控制器(ECU)及驱动模块,设计内置式CAN控制电路及通讯接口,兼容驻车系统运行、休眠、监控及空闲等多种工作模式,实现与车载CAN-BUS 的实时通讯功能(另文介绍)。由于ECPB在结构上较为复杂,需要对系统的控制策略进行分析,因此,本文特别选择ECPB控制器的运行控制策略作为研究对象,主要包括对停车后的长期性驻车、行车中的紧急制动(动态制动)、发动机熄火后的自动驻车、起步时自动释放和停车时对车辆自行移动实时监控[1]控制策略的探索,为满足汽车ECPB更好的安全驻车要求,对实现手动驻车控制、自动驻车控制、动态紧急制动控制和停车监控的约束特性和不同的逻辑条件[1]做专门研究,这对于未来汽车ECPB硬件和软件的研发,具有现实意义。
1 ECPB系统结构与原理
1.1 ECPB执行器的设计与原理
汽车永磁式无刷直流电机执行器及其系统的设计方案如图1所示。本方案主要由无刷直流电机、钢丝拉索、制动器及电控驻车制动模块(ECPB ECU)组成。 图1所示为ECPB系统的工作原理:车身电子稳定模块(ESP ECU)与电控驻车制动模块的信号控制端通过CAN总线连接;电控驻车制动模块的指令输出端与永磁体无刷电机电信号连接。当永磁体无刷电机得电工作时,永磁体旋转带动空心转子旋转,由于空心转子的输出端设计有蜗套,蜗套旋转驱动蜗杆转动;由于驻车拉索一端与蜗杆连接,另一端连接驻车制动器,因此,由蜗杆传动机构将旋转的运动转变为钢索的直线运动;最后,通过制动摩擦片对制动鼓产生制动力,实现车辆的驻车。当需要释放驻车制动时,电机反转,制动摩擦片得以释放。制动鼓和制动摩擦片之间的间隙,仍然由后轮制动器上的棘轮机构实现制动间隙的自动调整[2]。因此,如果利用现有车型(前盘后鼓式制动器)进行ECPB改装,制造成本相对较低,具有操作简单、驻车性能好、安全可靠等特点,潜在着较大的应用前景。
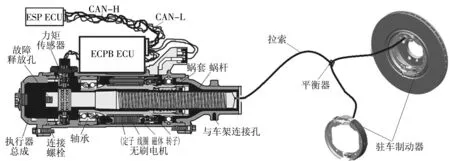
图1 ECPB电控驻车制动系统的组成及原理示意图
1.2 ECPB系统的通讯架构
永磁式电控驻车制动系统的CAN通讯结构主要由网关ECU、ECPB ECU、ESP ECU、发动机ECU、转向盘模块ECU及传感器、执行器等部件组成,其通讯架构如图2所示。ESP控制器通过CAN通讯控制ECPB的运行。ECPB控制器采集车速、发动机转速、驻车制动开关(注:机械式为手刹)、离合器位置、变速器位置(受控)、制动踏板开关、道路坡度信号、加速踏板位置、制动力传感器等信号进行分析、计算后,将控制指令输出到无刷电机并驱动钢索运动,从而实现驻车功能。网络架构则由CAN动力IS网、CAN CAR车身网和CAN CONF舒适网组成[3]。
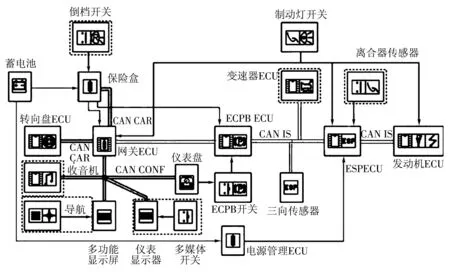
图2 ECPB系统的CAN通讯架构示意图
2 永磁式电控驻车制动系统的动力学特性分析
2.1执行器电机的转矩确定[4-5]
本方案执行器是永磁体无刷电机,假设驻车过程经过永磁体无刷电机绕阻的电流值为Iqf(A),无刷电机的电极对数为ξ,每个磁极的磁通量为φqf,电极的爪系数为θ,并且每相串联的匝数为n,那么电机工作时的输出总转矩Tas(应等于承受的外部总转矩T∑w)为
(1)
根据驻车环境自动给每个车轮施加驻车制动力时,制动摩擦片与制动鼓之间逐渐接触,并产生逐渐增大的制动力,此时无刷直流电机处在堵转的工作状态,在这种堵转状态下,无刷直流电机轴端的转矩计算式为

(2)
式中:Tdz为无刷直流电机输出轴端的堵转总转矩;TΣw为无刷直流电机输出轴端的输出转矩;ηdf为电源的工作效率,这里取0.7~0.75;ηco为滚动轴承、蜗套、蜗杆之间的传动效率,这里取0.99;ico为蜗套与蜗杆之间的传动比,这里取1。
2.2驻车钢索最大拉力的确定[4-5]
在永磁式电控驻车制动系统中,假设传动蜗杆的芯轴直径为D,螺纹轴距为t,无刷直流电机的转矩为Tas,则与钢索连接的传动蜗杆拉力为:
(3)
查阅GB 1276—1999《汽车制动系统结构、性能和试验方法》和GB 7258—2004《机动车运行安全条件》,驻车制动应通过纯机械装置把工作部件锁止,并且驾驶员手操纵施加于操纵装置上的力,乘用车不应大于400 N 。那么,传动蜗杆的拉力即钢索的拉力最大值为国家标准值与手刹放大系数的积,实际计算时应考虑安全系数(取值大于1)。
2.3 车辆的驻车制动力的确定
根据停车的需要,如果车辆在坡度角为a的道路上驻车,参照汽车机械设计的计算方法[2],确定驻车制动力的计算公式为:

(4)
式中:Mmax表示车辆最大总质量(包括满乘员+行李舱最大载重);g表示重力加速度;Rω表示车轮的滚动半径;r表示后制动鼓半径;kz表示手刹的放大系数;μ表示车轮与地面的滚动摩擦系数。
2.4车辆动态制动运动学模型[2,6]
如果车辆在行车中遇到制动力不足或制动失效等紧急情况,驾驶员需要实施紧急制动,可长按ECPB按钮,令系统参与完成汽车的紧急制动,根据车辆制动系统设计要求及其运动学原理,制动距离、制动初速度与制动时间的关系表达式如下:
(5)
式中:Sqa表示制动距离;uqs表示车辆持续制动阶段的平均减速度;Vo表示制动开始前的车速;τb1表示消除车辆制动间隙所需时间;τb2表示制动器制动力增加的时间。
3 驻车控制模块的通讯
汽车电控驻车制动系统控制器逻辑关系[4-5]如图3所示,系统的硬件主要由各种传感器和处理电路、单片机和驱动执行电路等组成,控制器模块采用microchip公司的PIC18F458 单片机微处理器作为该部分的主控芯片,集成了CAN 通信接口,执行博士公司的CAN2.0A/B协议,外围接口电路采用 Philips公司的PCA82C250作为接口芯片。ECPB系统驻车时控制器执行流程[5]如图4所示,单片机作为中央控制器,采集车速、发动机转速、电机转速、驻车开关、离合器位置、变速器位置(受控)、坡道角度(含侧向加速度和纵向加速度信号)、油门位置等信号,进行实时计算分析处理,最后输出指令到执行电机驱动钢索实现驻车功能。ECPB系统软件在编程开发之前,必须先建立针对单片机的软件控制策略,并进行运行环境的约束研究。

图3 ECPB驻车系统逻辑框图
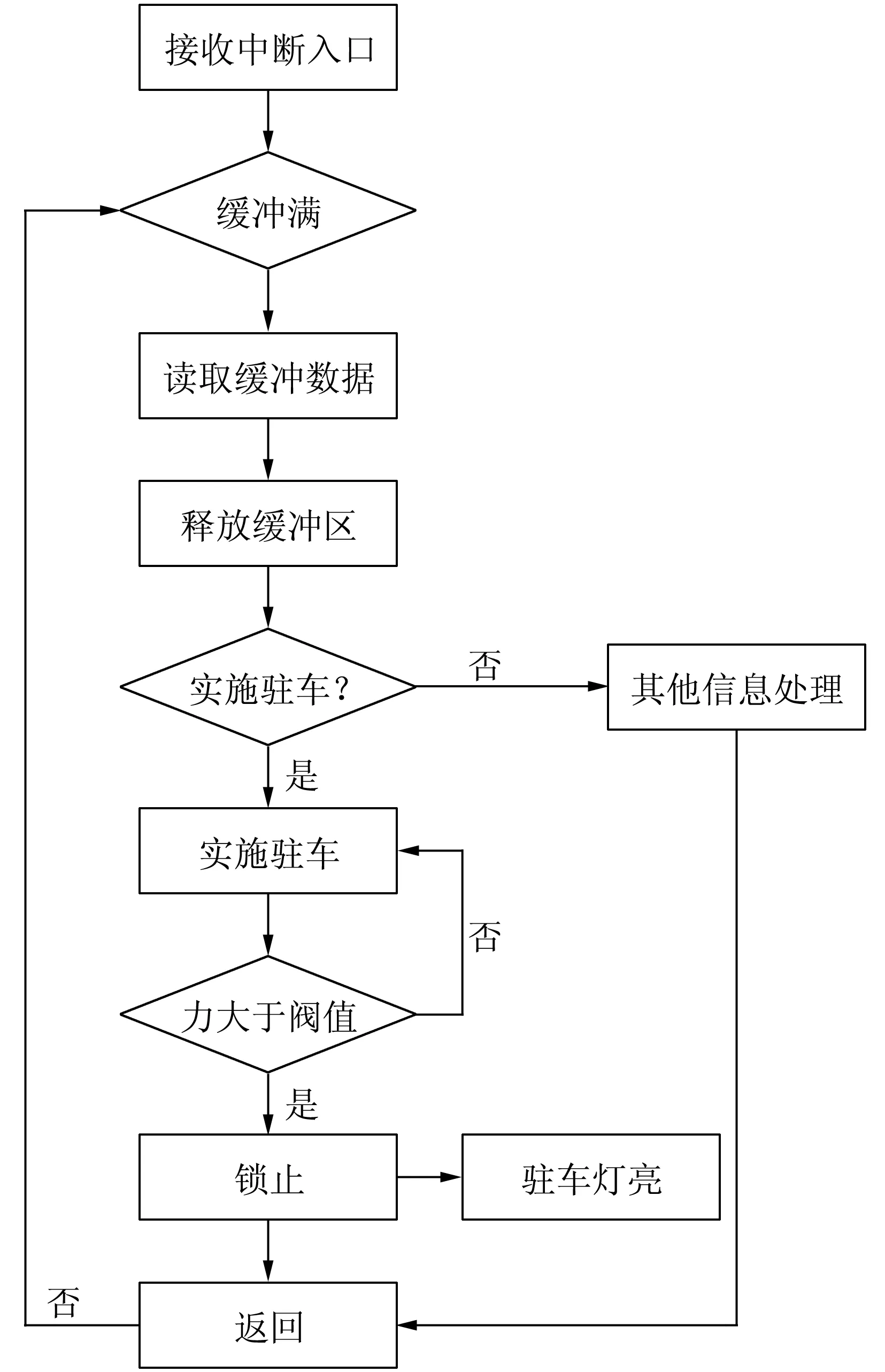
图4 ECPB驻车控制器运行程序图
3.1 ECPB控制器与ESP控制器的通讯策略[1]
在驻车过程中,当ECPB控制器需要与ESP控制器进行通讯时,ECPB发送的数据信息如下:1)驻车制动器应用自动驻车功能的实时状态;2)施加在牵引钢索上的制动力信息;3)驻车制动器工作状态显示;4)驻车制动器故障的自诊断信息。
3.2 ESP控制器与ECPB控制器的通讯策略[1]
驻车时,ESP控制器需要与ECPB控制器进行通讯,这时ESP控制器发送的信息如下:
1)无刷电动机旋转速度根据 ESP控制器诊断的电源信息,以不同的速度被应用,如果电源电压较低,则应用速度相应较慢。
2)ESP 控制器可以施加或释放制动设置,根据车辆的总质量、发动机的运转信息及行车道路坡度请求ESP驻车指令,使用ECPB控制开关,可获得驻车的制动力(扭矩增强)或解除制动力(扭矩减弱)。
3)如果车辆必须持续制动、制动释放或者使ECPB独立工作,那么 ESP控制器须向ECPB发出指令。
4 ECPB的制动策略探究[4,7]
ECPB必须获得ESP控制器发出的指令才可运行,这些指令信息包括道路坡度,车辆的行驶方向,轮胎的旋转信息,驾驶员对车辆行驶的操控意愿等。ECPB电控驻车制动有4种工作模式:通过操作ECPB开关实现手动驻车;自动驻车,即发动机熄火后车辆驻车的自动施加,车辆起步后驻车自动释放;动态制动,即通过操作ECPB开关使行驶中的车辆停驻,以及驻车期间对车辆移动的监控。
4.1 手动驻车制动策略
4.1.1 驻车制动锁止策略
ECPB功能允许通过驾驶员的设置,开启或关闭自动驻车功能。当关闭自动驻车功能时,驾驶员可以手动驻车,实施手动驻车的维持和手动释放。在设置手动驻车期间,驻车策略执行条件见表1,驾驶员需要驻车或起步驶离时只需要动一下ECPB开关即可。

表1 手动电控驻车制动策略条件说明
4.1.2 手动驻车最大程度锁止策略
如果驾驶员需要实施手动驻车,通过按住ECPB控制开关,延长3~5 s可以获得最大力度的锁止,达到最大锁止状态(边界),同时,设置特殊的最大驻车制动力警报和仪表信息提示,手动驻车最大程度锁止策略执行条件见表2。

表2 手动驻车最大程度锁止策略条件说明
4.1.3 手动驻车的维持策略
当ECPB需要长时间制动驻车时,由 ESP控制器发出制动力应用的命令,在主触发期间(发电机未工作,通过由 ESP 根据坡度和发送给ECPB控制器的信息计算得出的监控时间),ECPB控制器请求部分触发 ESP 控制器,以便对车辆的移动进行监控,车辆维持驻车的监控策略执行条件见表3。
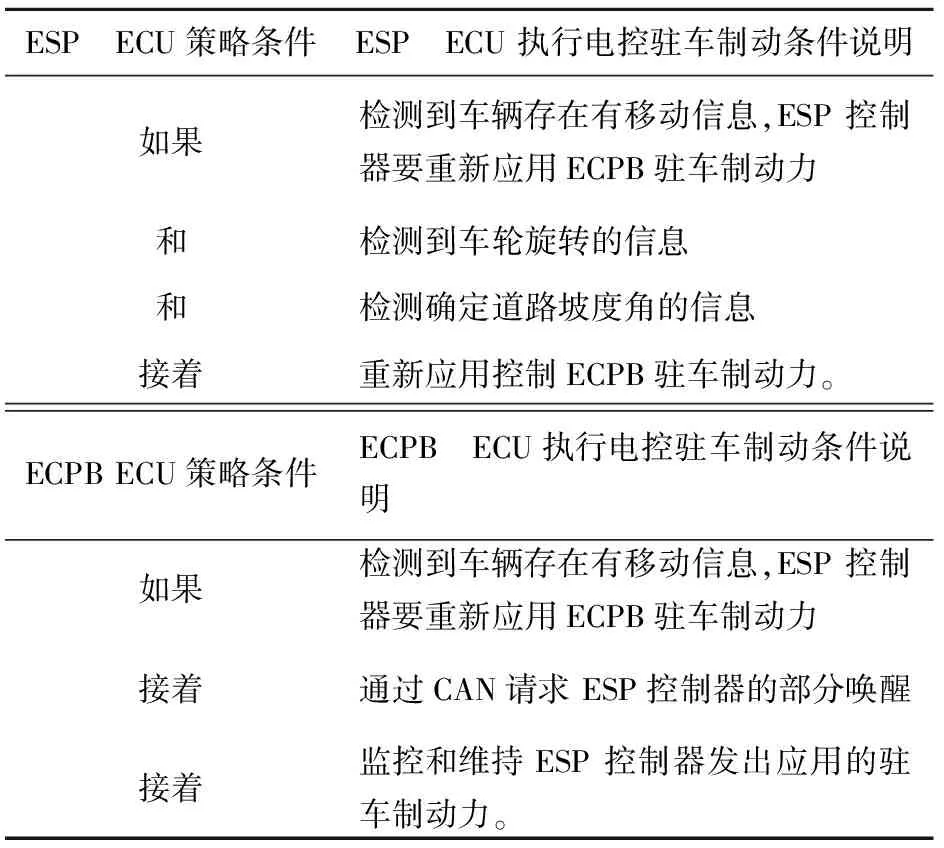
表3 手动驻车制动维持策略的条件说明
4.1.4 手动驻车解除策略
在ECPB自动模式关闭的前提下,驾驶员解除手动驻车的条件,只需ECPB控制开关激活(动一下开关)或踩下制动踏板或踩加速踏板,车辆即可解除驻车制动。
4.2 车辆自动驻车的策略
4.2.1 自动驻车锁止策略
当发动机关闭时,网关ECU(如图2)检测到发动机从旋转到停止,并把信息传递给ESP 控制器,驻车信息被确定,这时,ESP 控制器控制ECPB 的策略执行条件见表4。如果驾驶员以大于1 km/h的速度停止发动机,ESP控制器会等待速度降到极限值(边界)以下,才会向ECPB 发出执行驻车锁止指令。
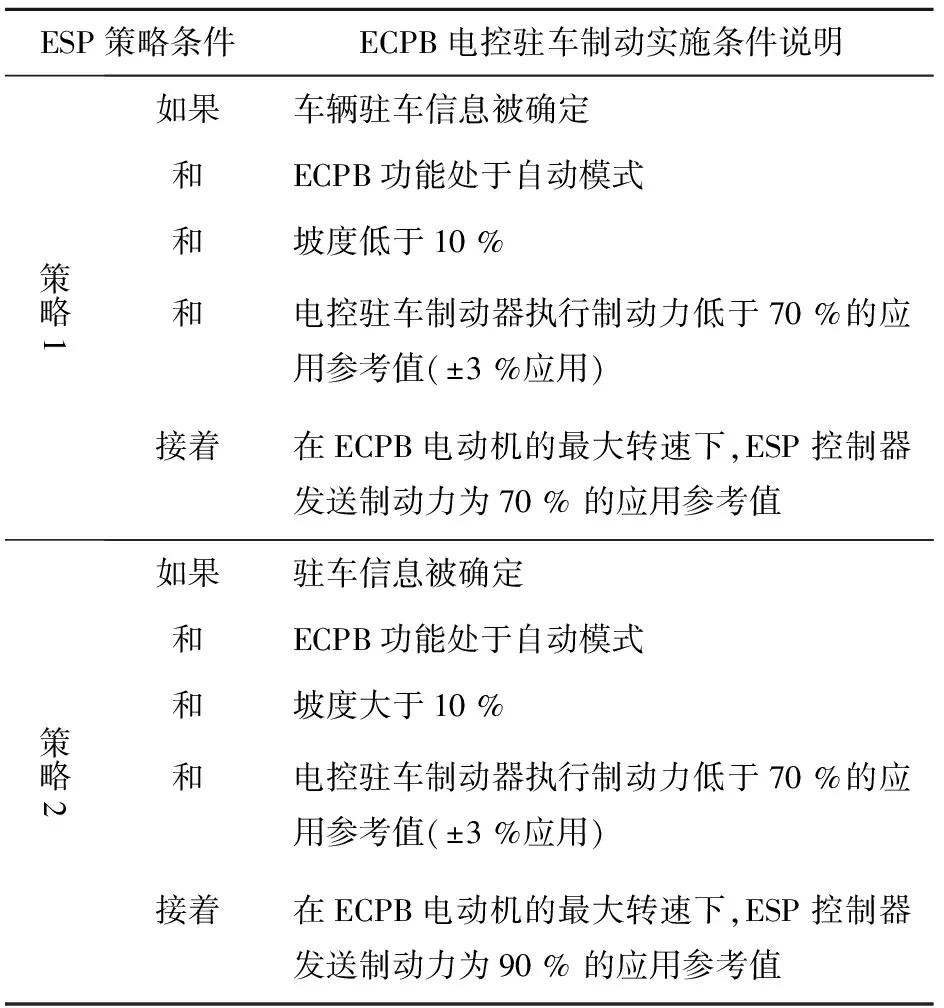
表4 车辆自动驻车锁止策略条件说明
4.2.2 车辆自动驻车解除策略
当驾驶员请求起步信息被确认时,ECPB控制器解除后制动鼓上的制动力,其驻车解除策略执行条件见表 5所示。
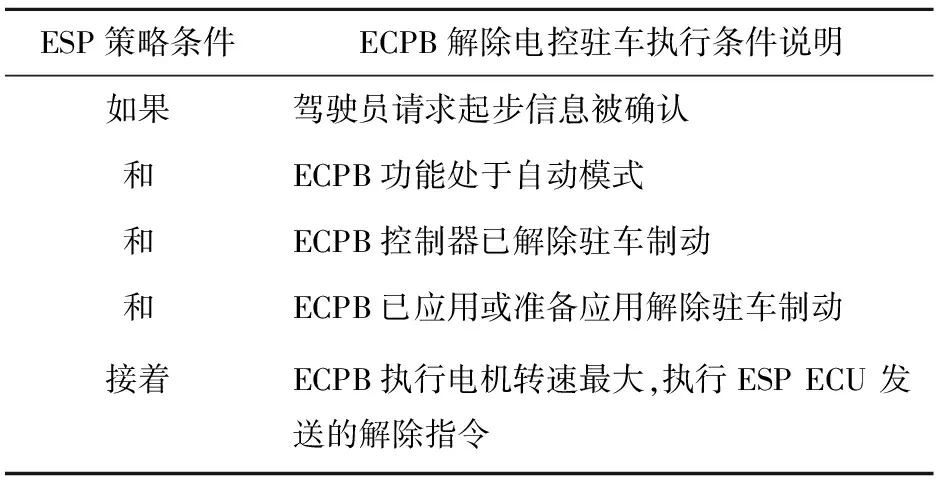
表5 车辆自动解除驻车策略条件说明
4.3 驻车期间ECPB施加监控策略
在手动驻车和自动驻车状态下监控策略均为激活状态时,发动机旋转状态和无旋转状态下监控策略均处于激活状态。如果驻车期间制动力的减小值大于10%,ECPB控制器对制动鼓需要重新实施附加力,以保证达到ESP控制的边界值要求,驻车期间的监控施加策略执行条件见表6。

表6 车辆驻车期间监控施加策略条件说明
4.4 车辆动态制动(紧急制动)策略
当车辆的驻车系统在独立模式下执行动态驻车时,ESP ECU 在车速降到3 km/h以下时发出应用ECPB驻车制动。当车速超过10 km/h 时,如果制动踏板突然出现故障,按下ECPB驻车控制开关,则启动ESP系统实施紧急制动[4,7](四轮制动),车辆动态制动策略见表7。

表7 实施ESP功能紧急制动策略条件说明
当车速超过10 km/h,且制动踏板突然出现故障,ESP系统也同时出现故障时(液压管路泄漏失效),则ECPB ECU执行驾驶员的请求,制动力与按压在ECPB开关上的时间成正比例,这时,车辆的动态制动策略见表8。

表8 实施ECPB功能紧急制动策略条件说明
上述研究的驻车策略及边界约束条件为ECPB的软件设计提供关键的技术支撑,在实施软件编程时需要考虑实现不同驻车功能所需要的逻辑关系,应合理试验,不断改进(修改阈值和边界),全面满足电控驻车系统工作安全性和可靠性的需要。
5 仿真结果与分析
5.1 取样车辆相关参数
方法:假设取样车辆在水平、干燥、良好的道路上进行紧急制动,分别对配备ECPB 和未配备ECPB车辆的制动距离、制动时间进行仿真比较。取样车辆动力型号EP6FD,额定功率84 kW,主要相关参数[3]见表9。

表9 取样车型相关参数
5.2 紧急制动性能仿真
要对ECPB系统的紧急制动效果作评价,需要对其作进一步的仿真分析,基于式(1)~(4)对电机电流、力矩、转速、堵转转矩和钢索的拉力进行分析,反映了系统驻车时必须考虑的策略要素。式(5)建立了车辆动态制动(紧急制动)的运动模型,在这里,设置制动初速度范围为0~35 km/h,运用Matlab软件对未配备ECPB和配备ECPB车辆的紧急制动距离、制动时间分别按式(5)进行仿真计算,输出结果如图5所示。
结果分析:在图5中,线Ⅰ是未配备ECPB 的车辆紧急制动距离、制动时间随制动初速度变化的响应曲线,线Ⅱ是配备ECPB 的车辆紧急制动距离、制动时间随制动初速度变化的响应曲线,两相比较,优势一目了然。为具体说明曲线Ⅰ、Ⅱ的差异,选取制动初速度为25 km/h时实施紧急制动,配备ECPB的车辆比未配备ECPB的车辆在停车水平距离上缩短了409 mm,比较前悬960 mm的取样车型,接近前保险杆与前轴距离的一半;在制动初速度为30 km/h实施紧急制动时,配备ECPB的车辆在停车水平距离上缩短了1 010 mm,超过取样车型前悬的距离,这在紧急制动的时刻,从防止追尾或事故发生方面评价,显著提高了车上人员和车辆财产的安全性,应用ECPB的效果优势明显。
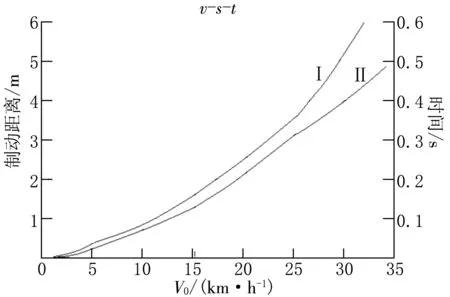
图5 紧急制动距离—制动时间仿真结果图
6 结语
基于CAN通讯的ECPB驻车策略涉及到机、电、液和车载网络一体化的综合应用,由于网络结构复杂,需要综合考虑参加驻车制动功能的电控单元、传感器、执行器、驾驶员意图和电源管理等要素,驻车策略重点在于逻辑流程和边界数据的选择与试验。基于CAN通讯的ECPB驻车策略也是今后智能汽车发展的主流方向,可以结合集成车身控制策略向多功能、多角度综合技术研发,同时充分应用车辆的主动安全策略,实现车辆使用的稳定控制和行车安全。
[1] 许炳照,张荣贵,苏庆列.基于CAN通讯的汽车电控驻车技术研究[J].长春工业大学学报,2016,37(2):105-110.
[2] 过学迅.汽车设计[M].北京:人民交通出版社,2013:213-216.
[3] 郭建亭.基于CAN总线的电子驻车制动系统的设计与研究[D].西安:长安大学,2014:25-48.
[4] 高荣.电子驻车制动系统执行机构研究与控制器设计[D].北京:燕山大学,2016:19-40.
[5] 刘峰.汽车EPB 系统控制策略的设计[J].汽车零部件,2016(4):59-61.
[6] 郇钲.汽车电子驻车制动EPB控制系统设计与实现[D].南京:南京理工大学,2012(2):43-50.
TheResearchonStrategyofAutomotiveElectronicControlParkingBasedonCANCommunication
XU Bing-zhao,et al.
(DepartmentofAutoApplication,FujianChuanzhengCommunicationCollege,Fuzhou350007,China)
In order to study the control method of electronic control parking system on the vehicle,a kind of the electronic parking brake system and its communication structure has been designed in this article.A parking strategy and constraint condition based on CAN communication has been put forward based on the analysis of the structure,working principle and dynamic characteristics of the ECPB.Combined with the requirements of ESP for parking active safety technology,it provides a reference scheme for the hardware and software design to electronic parking brake system.
ECPB design;CAN communication;parking control
10.3969/j.issn.1009-8984.2017.03.013
2017-04-21
福建省教育厅2016年第一批福建省中青年教师教育科研项目(JAT160716)
许炳照(1964-),男(汉),福建安溪,副教授 主要研究汽车运用工程。
TP273∶U463.22
A
1009-8984(2017)03-0053-06
猜你喜欢
汽车维护与修理(2018年9期)2018-10-31
小学生导刊(2017年17期)2017-05-17
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
世界汽车(2016年8期)2016-09-28
西藏科技(2016年10期)2016-09-26
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
汽车维护与修理(2015年2期)2015-02-28