基于嵌入式系统的异步电机半实物实时仿真平台
2017-11-09 08:29余思维张丰鸣
电力科学与工程 2017年10期
陈 众, 余思维, 罗 通, 张丰鸣, 文 亮
(1. 湖南省智能电网运行与控制重点实验室(长沙理工大学),湖南 长沙 410004;2. 国网江西省电力公司 宜春供电分公司,江西 宜春 336000)
基于嵌入式系统的异步电机半实物实时仿真平台
陈 众1, 余思维1, 罗 通1, 张丰鸣1, 文 亮2
(1. 湖南省智能电网运行与控制重点实验室(长沙理工大学),湖南 长沙 410004;2. 国网江西省电力公司 宜春供电分公司,江西 宜春 336000)
提出了一种基于嵌入式虚拟电机闭环控制的半实物仿真平台。为了精准地模拟出真实电机启停、变速等过程中内部电磁与机械状态的变化过程,基于硬件在环技术,构建了一种利用嵌入式装置运行电机模型搭配实体PLC控制器的硬件在环(HIL)实时仿真平台。嵌入式装置与PLC实物控制器进行实时通讯,并通过PLC发出的动作指令调节电机转速,构成一个闭环实时控制系统,整个过程最终呈现在上位机界面。系统的仿真步长达到200 μs,逼近真实工况。仿真系统分为在线和离线,二者参数一致,得到的转速及电流电压波形与MATLAB建模结果比对,实验结果准确可靠,既满足在线实时仿真科研,又满足离线培训教学演示。相比纯实物实验节约科研经费,缩短时间成本,体现了该硬件在环仿真平台的可行性与优越性。
嵌入式; 硬件在环; 闭环控制; 实时仿真
0 引言
近年来,随着电力电子技术和控制技术的飞速发展,使得交流调速的性能可以和直流调速相媲美,交流调速也就成为了电气传动领域的研究热点[1]。但随着对交流电机的深入研究,原先传统的研究手段已经不能满足科研的需求,在电力行业、电气传动领域等大型实验设备为研究主体的科研实践中,许多由于实验设备受限产生的弊端开始显现,如极端工况对设备的损害,操作人员人身安全隐患等[2]。另外,往往真实电机的设计、制造也需要耗费时间,无疑增加了科研时间与成本[3]。
硬件在环(Hardware in Loop,HIL)是半实物实时仿真技术的一种重要工程形式,即被控对象采用实时数学模型模拟,与真实的控制器连接,进行整个系统的半实物实时仿真测试[4],可以方便地实现设计方案的验证与优化,缩短开发周期,降低研发成本,并且对在现实中难以实现的设备极端工况如电机各种短路,进行实时模拟而不会对设备造成损害,降低试验风险。HIL仿真中最需要解决的问题就是“实时性”的问题,对系统响应时间有着很高的要求[5]。文献[6]提出了一种多微机并行处理交流电机实时仿真系统,采用数字形式对交流电机进行建模仿真,步长为1 ms,虽然能够较准确展示电机内部情况,但对于精确实时仿真仍无法满足要求。文献[7]提出了一种基于FPGA定参数模型的三相异步电机及逆变器实时仿真模型,步长达到了1 μs,并实现了HIL实时仿真试验。
为了有效地模拟电机内部真实工况,本文提出了一种基于嵌入式系统的电机硬件在环实时仿真,在嵌入式板卡中搭载电机模型,连接到以PLC作为控制器的真实设备上,实现HIL的半实物实时仿真[8-19]。以异步电机的调速实验为例测验和调试整个系统,并同步在MATLAB 中建模进行对比验证,验证该仿真系统的可靠性。所设计的仿真系统具有研发成本低,学习周期短,安全性好等优点。
1 异步电机数学模型搭建
基于建模方便,采用旋转坐标系下的dq轴模型,只需Park变换,无需旋转变换,省去了计算同步旋转角度θ及运行实时模型时查询三角函数带来的资源占用和时间消耗。转换后的dq轴数学模型为:
定子侧电压方程为:
(1)
转子侧电压方程为:
(2)
磁链方程为:
(3)
式中:Ls、Lr、Lm分别为定子自感、转子自感、定转子互感;Rs、Rr分别为定子电阻、转子电阻;L1σ、Lms分别为定子相绕组漏电感和主电感;L2σ为转子相绕组漏电感;w、wr分别为旋转磁场的电角速度和转子的电角速度;p为微分算子。因此,dq0轴下异步电机的等效电路如图1。

图1 异步电机dq轴等效电路
2 电机硬件在环实时仿真平台
2.1系统构架
本仿真平台由嵌入式仿真装置、PLC控制器和PC上位机仿真软件3个部分组成,系统结构如图2所示。嵌入式系统中运用了FPGA和ARM等硬件技术,运行电机仿真算法,模拟电机运行状态,并与上位机和控制器进行数据交换;控制器部分是PLC实际设备,对虚拟电机进行状态监测并发出指令信号进行反馈控制;上位机软件由Visual Stuido 2013开发,提供各种电机模型参数设置、工作特性展示等,并且可进行离线与在线实验。

图2 硬件在环实时仿真系统结构框图
2.2嵌入式装置的说明
嵌入式装置外观如图3所示,将在VS软件环境下开发的虚拟电机模型的控制算法移植到由FPGA及ARM等搭建的硬件环境中,运行电机仿真算法、模拟电机运行状态,并与控制器与上位机进行数据交互,查看电机实时仿真状态。CPU标准主频800 MHz,板卡I2C串行24CXX系列EEPROM,可用于存储128字节数据,因为电力系统常用频率50 Hz,一个周波20 ms,每个周波满足128个采样点,便于傅里叶算法。仿真系统能够实现200 μs定时周期,并具有在此周期内30阶离散状态方程运算的能力。系统具有12路16位同步A/D和16路16位D/A用于每个周波满足128个采样和输出。

图3 嵌入式装置实体图
2.3硬件在环实验设计
为了系统地研究异步电机的工作特性及运转下的内部情形,实验范围应当包括电机的启动、调速、制动及工作特性实验。将异步电机模块搭载到嵌入式装置中,根据不同的实验开发不同的算法,在VS环境中实现不同控制策略的编程,配合实体控制器或者外接电路设备实现对实验进程的控制,完成硬件在环实时仿真,并通过上位机的显示界面对其进行系统的展示和研究。
2.4输入输出定义及闭环控制过程
仿真平台的输入量包括定子电压Us、定子电流Is、负载转矩Tm等、输出量包括转子电压Ur、转子电流Ir、电磁转矩Tem、功率因素cosφ、及功率p等。
嵌入式装置实时运行电机模型,电压信号(或电流信号)Ua、Ub、Uc先经过3S/2R换为Uq、Ud,然后进行仿真运算。输出的定、转子电压电流等信号通过DA转换成模拟量后输入到PLC控制器的I/O口,PLC在对所采集数据进行监测的同时通过预设程序对信号进行运算并向其电机发出动作指令,输出模拟量信号再经过转换给嵌入式系统进行内部运算从而调整电机转速,同时将转速信息反馈给PLC控制器,构成一个闭环系统。控制器和嵌入式系统之间通过485通信连接,嵌入式系统与上位机系统通过TCP/IP连接。整个仿真系统在一个周波20 ms内满足128个采样点,实现200 μs定时周期,解决实时性问题。
3 硬件在环实时仿真实验
3.1电机硬件在环仿真实验
实验部分由在线与离线实验2部分完成。在线实验为HIL仿真,通过嵌入式装置内的电机模型运算电机内部参数,数据与PLC同步通讯,并通过PLC反馈指令调节电机转速;离线模型中又充分考虑了实际物体,脱开嵌入式装置和控制器,在软件环境中建立了仿真模型,其参数可以直接应用到半实物仿真中,达到了离线仿真和真实系统的参数一致性。
离线和在线实验均由PC端的上位机进行展示,上位机程序由VS环境开发完成,它在图形处理和数据库管理等方面具有较强的优势,并且用它来实现底层的通讯控制有着更快的效率,设计的界面简洁友好。本文研发的嵌入式系统电机硬件在环仿真平台操作主界面参数如表1所示。在上位机界面可进行电机模型和实验类型的选择并查询部分相关参数。

表1 仿真平台主界面参数
3.2异步电机转子绕组串电阻调速实验
选择异步电机转子串电阻调速实验来测试实时仿真平台。异步电动机的转速公式为:
(4)
式中:n为转子转速;s为转差率;f1为电源频率;p为极对数。
这里通过对转子回路串入电阻来改电动机的转差率从而实现对转速的调节。根据电磁力矩公式:
(5)
由于负载力矩不变,则有:

可得:

(6)
由公式(6)可计算出所需串入的外接电阻R为15 Ω。实验内容为待电机启动稳定后串入外接电阻,使得电机从额定转速(1 471 r/min)下降至 1 200 r/min。进入实验页面后,启动电机待稳定运行进入额定转速,串入15 Ω的外接电阻直至再次稳定运行。调速实验波形图如图4所示,同时可设置电阻大小并通过上位机与控制器的通讯实时控制实验进程,生成的转速波形图清晰直观。

图4 异步电机转子串电阻调速实验转速波形图
由于在线实验为实时仿真,通常实验在极短的时间内可完成,为了便于观察实验过程,可通过实验回放观察机械转矩及定转子侧的波形图,如图5和图6所示。

图5 定子侧三相电流仿真波形

图6 转子侧三相电流仿真波形
4 MATLAB仿真验证及实验结果对比分析
在MATLAB中首先模拟异步电机全压启动的过程,同样让异步电机直接启动后的稳定转速在 1 500 r/min左右,再通过编写程序使转子在串入电阻后转速控制在1 200 r/min左右。
整个过程包括全压启动和转速调节2个部分,该电机全压启动过程大致在0~0.3 s时间段内,通过直接启动获取稳定运行参数运用在后面的调速过程,由于重点为调速阶段所以启动阶段不做详细说明。调速过程部分程序说明如下:
%调试控制
if t>0.3
wr_e=-wr_target+wr;
Rint=Rint+Ki*wr_e;
Romga=Kp*wr_e+Rint;
SM.R=[SM.Rs 0 0 0;
0 SM.Rs 0 0;
0 0 SM.Rr+Romga 0;
0 0 0 SM.Rr+Romga];
SM.RLinv=SM.R*SM.Linv;
end
%反变换,获取相关交流量
P_theta_c=[cos(theta_c)sin(theta_c); (-cos(theta_c)+sqrt(3)*sin(theta_c))/2 (-sqrt(3)*cos(theta_c)-sin(theta_c))/2];
最后得到如图7所示的模拟异步电机启动调速过程转速图形,与仿真系统的结果进行对比验证。
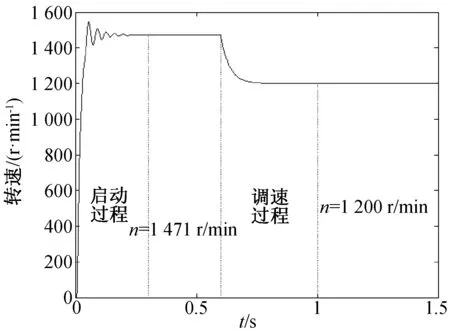
图7 异步电机转子串电阻调速MATLAB仿真波形图
对比MATLAB仿真结果可直观发现,二者均在0~0.3 s左右属于电机启动状态,0.3 s之后基本进入稳定运行,转速达到预设1 500 r/min左右,在0.6 s时刻串入转子电阻,电机转速开始下降,并最终在1 s时间内稳定在1 200 r/min左右,转速波动过程相似,曲线吻合程度高,且定转子电流在整个仿真过程的波动情况符合实际工况,达到了预期目的。仿真结果表明:异步电机转子串电阻调速实时仿真实验的动态响应与实际调速系统的运动过程基本上是相吻合的,仿真结果能够比较准确地反映串电阻调速系统的实际工况,从而验证了该半实物仿真系统的可行性。
5 结论
本文提出的基于嵌入式系统的电机硬件在环实时仿真平台模拟出的电机状态逼近实际工况,仿真实时性较好。为深入研究电机系统提供了一个安全、直观、经济、高效的环境。与其他仿真平台相比,本平台既包含在线实时仿真,系统模型建立准确,配合实物设备完成硬件在环实验,高效可靠,用于科研实践;又包括离线实验,纯软件环境中建立的模型与在线实验参数一致,用于培训教学。由于硬件在环技术的实施,使得实验对象不单局限于电机本身,更可配合实际设备研究其工作特性及验证、调试控制程序等,大量节省了实验成本,同时缩短研发周期。目前该实验平台已成功应用于实践,并与多家电科院及电力公司展开合作。
[1] 高景德,王祥珩,李发海.交流电机及其系统的分析[M].北京:清华大学出版社,1993.
[2] 卢子广,柴建云,王祥珩.电力驱动系统实时控制虚拟实验平台[J].中国电机工程学报,2003,23(4):119-123.
[3] 安跃军,孟昭军.电机系统及其计算机仿真[M].北京:机械工业出版社,2013.
[4] 位正.新一代硬件在环仿真平台的研究和开发[D].北京:清华大学,2009.
[5] 王晓远,邓婕,陈益广.交流电机实时仿真系统以及实时性的研究[J].电工电能新技术,2001,20(9):41-44.
[6] 黄苏融,朱培骏,高瑾,等.基于数字化虚拟电机硬件在环实时仿真测试[J].电机与控制应用,2012,39(7): 20-25.
[7] 黄苏融,黄艳,高瑾,等.基于FPGA的虚拟异步电机系统的半实物实时仿真[J].电机与控制应用,2013,40(9): 33-38.
[8] 刘延斌,金光.半实物仿真技术发展现状[J].仿真技术,2003,11(1):27-32.
[9] 杜中兰,赵海森,刘晓芳,等.基于dq0坐标系的异步电机等效电路参数在线辨识方法研究[J].华北电力大学学报(自然科学版),2013,40(3):30-35.
[10] 黄苏融,刘畅,高瑾,等.五相内置式永磁同步电机硬件在环实时仿真平台的实现[J].电机与控制应用,2014,38(10):20-25.
[11] 陈源龙,李东,马培军,等.基于HIL半实物仿真平台体系结构的设计及实时性改进[J].南京航空航天大学学报,2016,42(4):531-536.
[12] 刘天皓,韩冰,吕盼,等.电压暂降过程中异步电机定子电流计算新方法[J].华北电力大学学报(自然科学版),2016, 43(4):47-52.
[13] 谢小荣,严干贵,陈远华.三电平PWM变频调速控制系统的MATLAB仿真平台[J].电网技术,2013,27(9):18-22.
[14] 孙玉良,韩昌佩,王飞.基于半实物仿真的高精度永磁同步电机控制方案[J].电机与控制应用,2016, 43(9):31-37.
[15] 杨馥华,许伯强.异步电机变频调速系统仿真平台研究[J].电力科学与工程,2011,27(8):10-14.
[16] 张晓玲,许伯强.异步电机矢量控制变频调速仿真研究[J].电力科学与工程,2010,26(12):24-27.
[17] 顾春雷,陈中.电力拖动自动控制系统与MATLAB仿真[M].北京:清华大学出版社,2014.
[18] 李强,宓超,王晨星,等.基于虚拟现实技术的沉浸式PLC控制程序的半实物仿真系统[J].中国工程机械学报,2013,11(1):41-45.
[19] 张厚升,于兰兰,孟天星,等.基于Simulink的绕线式异步电机串级调速系统虚拟实验分析[J].实验技术与管理,2016,33(6):112-116.
Real-time Simulation Platform for Asynchronous Motor Basedon Embedded System
CHEN Zhong1, YU Siwei1, LUO Tong1, ZHANG Fengming1, WEN Liang2
(1. Hunan Province Key Laboratory of Intelligent Power Grid Operation and Control, Changsha University of Science and Technology, Changsha 410004, China;2.State Grid Jiangxi Yichun Power Supply Company,Yichun 336000,China)
A hardware-in-the-loop simulation platform based on embedded virtual motor closed-loop control is proposed in this paper. In order to accurately simulate the process of internal electromagnetic and mechanical state change during the process of starting and stopping the motor, a hardware-in-the-loop real-time simulation platform with the embedded device implementing the motor model and the real physical PLC controller was developed based on the HIL technology. Embedded device communicates with physical PLC controller in real time and adjusts the motor speed through the action command issued by PLC, which constitute a closed-loop real-time control system. The whole process eventually presented in the host computer interface. The simulation step of the system reaches 200 μs, approaching the real working condition. The simulation system is divided into online and offline situations and the two parameters are consistent. The obtained speed and current voltage waveform are accurate and reliable by comparing with the MATLAB modeling results. It meets both the real-time simulation of online research and the offline training and teaching demonstration. Compared with the pure physical experiment, it saves research funding and cuts the time cost, which embodies the feasibility and superiority of hardware-in-the-loop simulation platform.
embedded; hardware-in-the-loop; closed-loop control; real-time simulation
10.3969/j.ISSN.1672-0792.2017.10.003
TM343
A
1672-0792(2017)10-0016-06
2017-06-07。
陈众(1974-),博士,副教授,研究方向为电力系统与控制。余思维(1991-),男,硕士研究生,研究方向为电力系统仿真。
猜你喜欢
家庭影院技术(2021年7期)2021-08-14
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
中学生数理化·中考版(2020年10期)2020-11-27
电子制作(2019年7期)2019-04-25
中学生数理化·中考版(2018年11期)2019-01-31
铁道通信信号(2018年2期)2018-04-18
制造技术与机床(2017年3期)2017-06-23
通信电源技术(2016年5期)2016-03-22
组合机床与自动化加工技术(2014年10期)2014-03-01