人工智能视角下的无人驾驶技术分析与展望
2017-11-08 05:46:44陕西省经开一中
电子世界 2017年20期
陕西省经开一中 郭 旭
人工智能视角下的无人驾驶技术分析与展望
陕西省经开一中 郭 旭
无人驾驶技术是当前汽车产业发展的新方向,其目标是解决人们对驾驶安全、舒适性和可靠性的更高需求。随着人工智能广泛应用于计算机视觉、自然语言处理、传感器融合、语音识别等各个领域,无人驾驶技术取得了一定的突破性进展。自动驾驶初创企业、互联网公司以及各大汽车厂商,都在积极探索利用人工智能技术实现最终的无人驾驶。本文就在此背景下,对无人驾驶中的人工智能技术进行了相应的阐述与分析,并指出了未来无人驾驶所面临的问题与对该领域的未来展望。
无人驾驶;深度学习;人工智能
一、无人驾驶技术概述
目前的自动驾驶可分为两类:一类是目前非常火爆的无人驾驶,属于自动驾驶类别中的L4阶段[1]。无人驾驶更强调的是车的自主驾驶以实现舒适的驾驶体验和人力成本的节省,典型的例子为百度和谷歌的无人车;一类是高级辅助驾驶系统ADAS(全称为Advanced Driver Assistance System),发展历史已久,早在上世纪70年代就已进入车厂布局中。不过,高级辅助驾驶系统可以视作无人驾驶汽车的前提,随着ADAS实现的功能越来越多,渐进式可实现无人驾驶。如表1所示,根据美国高速路安全管理局(NTHSA)的定义,汽车的自动驾驶可分为四个阶段,目前发展技术处于汽车自动化程度的第二阶段。
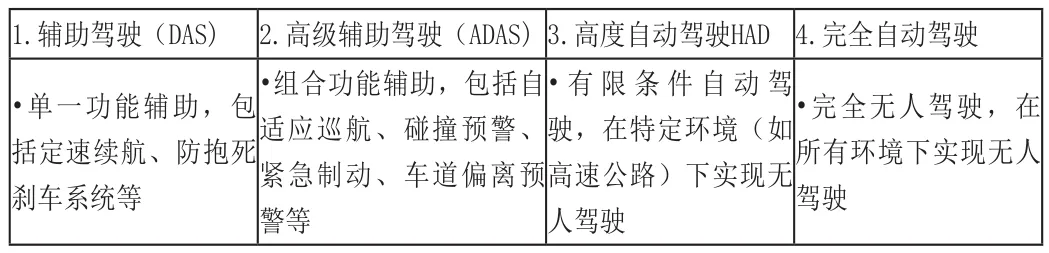
表1 汽车自动驾驶阶段划分
谷歌是参与自动驾驶研究的先驱,也是完全自动驾驶的倡导者,代表了目前无人驾驶的最高水平。谷歌自2009年起推进无人驾驶的开发,2015年有史以来第一辆全无人驾驶汽车开上公共道路。而百度于2013年开始涉及无人驾驶领域的研究,2016年11月与车厂合作打造的自动驾驶车已体验运营,体验全程3.16km, 使用L4自动驾驶技术实现红绿灯识别、行人避让以及超车并线等功能并且也获得了加州无人驾驶牌照。总之,目前自动驾驶领域的先驱主要集中在互联网企业,其中一个重要的原因就在于互联网企业掌握了核心的技术,包括语音识别、图像处理、语音识别等。
二、人工智能视角下的无人驾驶技术
自动驾驶智能汽车作为一个机器人系统,所涉及到的技术主要有感知、路径规划和控制决策三大块内容。其中智能感知技术是前提,而路径规划和控制决策有赖于人工智能相关技术的研究与应用。
(一)智能感知:传感器技术和模式识别技术
汽车的环境感知通过集成视觉、激光雷达、超声传感器、微波雷达、GPS、等多种车载传感器来收集数据,并根据所获得的道路信息、交通信号的信息、车辆位置和障碍物信息做出分析和判断。雷达和摄像头是自动驾驶的标配,而更高级的无人驾驶的实现需要多种传感器的融合:激光雷达分辨率高,是构建精确的汽车周边3D环境的基础,但成本高,且尚未实现规模化生产;毫米波雷达康干扰能力强,稳定性高,成本较激光雷达低,看好其在低端车型的普及;摄像头可以很好的识别人物和交通标识,以用来识别评估危险,是自动驾驶不可或缺的一部分。
通过传感器进行数据收集后就要进行模式识别,其主要有两个方面:光学信息识别和声学信息识别。对应到自动驾驶中,光学信息识别包括对路况、行人等做出的判断;声学信息识别能够实现车与车,人与车之间的智能沟通。例如:在驾车过程中,驾驶员通过观察前方就能轻易分辨出车道线的信息,若智能汽车获取车道线信息,首先需要通过摄像头获取道路影像,但其本身并不具备映射到真实环境的物理含义。只有通过适当的算法从影像资料中提取能反映车道线的影像部分,并进行映射。不同的传感器由于环境感知原理的差异,识别算法上也存在着不同。
(二)人工智能:通过学习与优化作出决策
目前,通过深度学习的方式让无人驾驶汽车不断地优化自己的驾驶行为,是目前最有效的解决方案。每一辆无人车行驶过程中遇到各式各样的交通情景和突发状况将产生大量的数据,这些大数据被传回云平台用作深度学习的训练样本,经过大量样本训练学习的“驾驶脑”,不仅仅获得了自身行驶的驾驶经验,同时也获得了其他车辆的“学习、训练成果”,随着样本训练的不断增加,“驾驶脑”的驾驶技术将呈现指数式的增长,将大幅度提升无人驾驶技术的进步,同时提高无人驾驶汽车的安全性[2]。尤其是随着芯片巨头NVIDIA于2017年推出了新一代针对自动驾驶开发的深度学习的车载超级电脑——XAVIER,其可以用作自动驾驶汽车的超级大脑,以深度学习算法来加强车辆的感知能力,识别出车辆行驶环境周围的其他所有物体,包括行人、车辆、路标、车道线、建筑设施等等,对车辆各类传感器收集到的数据进行处理与分析,进而进行判断,再做出决策。
随着深度学习在图像识别领域取得较大的突破,深度学习算法通过多层迭代对特征抽象进行模式识别的学习,从而能够以较高的精度实现对路况、物体的识别。在大数据和云计算时代,智能控制技术需依托深度学习,才能实现自动驾驶所要求的安全性和精确度。深度学习是人工智能的一门学科,是通过计算机算法在机器上模拟神经网络,让机器具备学习的能力。例如,卷积神经网络CNN在图像识别领域具有了相当高的精度被广泛应用在自动驾驶领域。由于CNN在神经网络的结构上针对视觉输入本身特点做的特定设计,所以它是计算机视觉领域使用深度神经网络的不二选择。无人驾驶的感知部分作为计算机视觉的领域范围,也不可避免地成为CNN发挥作用的舞台。而随着各种改进CNN的出现,其被广泛应用在物体检测与3D感知技术中。
三、所面临的问题与未来展望
目前,无人驾驶在业界获得了广泛的关注,但是也面临着许多亟待解决的问题,才能进入最终的实用阶段。
在技术方面,传感器和算法模型是自动驾驶技术的核心构成,其技术先进度、工业成熟度直接决定着无人驾驶的发展阶段。传感器:目前性价比较高的搭配方案为毫米波+雷达,但激光雷达+摄像头的方式在传感器精度方面表现更佳。未来如果实现无人驾驶,激光雷达将是必不可缺的传感器之一。算法与决策:自动驾驶的算法技术壁垒较高,涉及到定位技术、物体和场景识别、智能决策等。随着人工智能技术的不断发展与突破,该领域将有越来越多的研究成果出现,并极大的推动无人驾驶的快速发展。
在道德和合法性问题上,无人驾驶汽车也面临着相当大的挑战。无人驾驶汽车是一个决策机构,在行人避让、超车决策等问题上存在一定的道德问题。另外,无人驾驶汽车上路的标准、交通事故的认定、交通赔偿的判决等一系列问题都有待于法律法规的完善,这些不是技术问题所能解决的,也不是一朝一日通过法律能够制定的,需要不断的探索与完善。
无人驾驶面临的另外一个比较重要的问题是安全性问题。无人驾驶在技术上存在着控制权被黑客攻击并非法利用的可能,在这种情况下无人驾驶汽车甚至会成为不法分子危害公民人身安全的工具[3]。另外,技术的可靠性和安全性也是无人驾驶技术能否保证持续安全的重要问题,系统的崩溃、反应的延迟都有可能会造成重大的安全隐患。
无人驾驶汽车作为新事物,提高了人们当前在出行中面临的诸如驾驶舒适性、决策高效性、控制智能化等各个方面。它带给我们的便利和产生的问题在一定时间内是并存的,并存在着某些难以解决的矛盾。但是随着人工智能技术的不断发展与完善,以及对无人驾驶技术的高投入与重视,无人驾驶技术将会变得越来越成熟。另外,在解决诸如道德、法律、安全等问题上,随着制度的完善和人们对无人驾驶技术的不断接受与认可,无人驾驶技术必将对人类的出行方式产生重大的影响与变革。
[1]余阿东,陈睿炜.汽车自动驾驶技术研究[J].汽车实用技术,2017.
[2]杨震.自动驾驶技术进展与运营商未来信息服务架构演进[J].电信科学,2016.
[3]李付俊.浅谈汽车自动驾驶技术的发展与未来[J].科技论坛,2016.
郭旭(1999—),男,陕西西安人,现就读于陕西省经开一中高中二年级,研究方向:人工智能。
猜你喜欢
作文小学中年级(2022年9期)2022-09-08 06:13:30
中学生数理化·七年级数学人教版(2020年11期)2020-12-14 06:59:52
科学(2020年3期)2020-11-26 08:18:28
学生天地(2020年5期)2020-08-25 09:09:08
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
艺术品鉴证.中国艺术金融(2018年8期)2019-01-14 01:14:28
艺术品鉴证.中国艺术金融(2018年10期)2019-01-08 02:44:26
艺术品鉴证.中国艺术金融(2018年12期)2018-08-26 06:03:48
电子测试(2018年10期)2018-06-26 05:53:36
汽车博览(2016年9期)2016-10-18 13:05:41