Delta机器人控制器电路优化设计*
2017-11-02 01:24:52唐立军
网络安全与数据管理 2017年20期
王 磊,唐立军
(1. 长沙理工大学 物理与电子科学学院,湖南 长沙 410114; 2. 近地空间电磁环境监测与建模湖南省普通高校重点实验室,湖南 长沙 410114)
Delta机器人控制器电路优化设计*
王 磊1,2,唐立军1,2
(1. 长沙理工大学 物理与电子科学学院,湖南 长沙 410114; 2. 近地空间电磁环境监测与建模湖南省普通高校重点实验室,湖南 长沙 410114)
针对Delta机器人安全性、可靠性和可维护性方面的问题,提出了一种设计高性能Delta机器人的方法,该方法针对Delta机器人的试用情况,对控制器硬件电路工作性能、静电放电、雷击浪涌、射频辐射特性等方面进行实验研究和测试分析,进一步对Delta机器人控制器的电源电路、通信电路、信号输入电路、外壳屏蔽和静电释放等关键电路进行了优化改进。通过优化前后的测试结果表明,优化改进后的控制器硬件电路的多项测试指标比之前有较大提升,从而进一步提高了Delta机器人的安全性、可靠性和可维护性。这种方法对于设计制作其他机器人也有较好的借鉴意义。
Delta机器人;控制器电路;Delta机器人优化设计
0 引言
1959年恩格尔伯格研制出世界上第一台工业机器人后,生产线上自动化水平得到了较大提高[1-3]。尤其是并联机器人因高效率、高可靠性等特点,得到广泛使用,最具代表性的是CLAVEL R博士于1985年发明的Delta机器人,它一般具有3个空间自由度(三维空间XYZ平动)和1个转动自由度(绕Z轴旋转),结构简单、惯性小,速度快、加速度大[4-5],常用于抓放操作[6],具有较快运动节拍、较大工作空间以及较高的重复精度等[7-8]。
控制器作为工业机器人的四大核心零部件之一,其硬件电路的任何一部分失效或发生故障,都会对机器人的整体性能产生影响。
为更好地防范故障和排除隐患,根据Delta机器人的性能指标要求,从安全性、可靠性和可维护性出发,重点探讨控制器电路的优化方案,并针对实验室Delta机器人在生产线现场出现的实际问题,依据静电放电、雷击浪涌、射频辐射等实验结果,对实验室Delta机器人控制器电路进行优化设计和实现,探索高性能 Delta机器人设计方法。
1 实验室Delta机器人控制器电路的设计与实现方案
Delta机器人控制器的整体硬件电路框图如图1所示,电源电路负责供电,MCU最小系统处于中枢地位,负责管理和控制存储电路、报警电路、模数转换电路、通信电路、功率输出电路、信号输出电路、信号输入电路。通过控制伺服驱动、电磁阀等执行部件,并接收信号反馈,实现Delta机器人的正常工作。
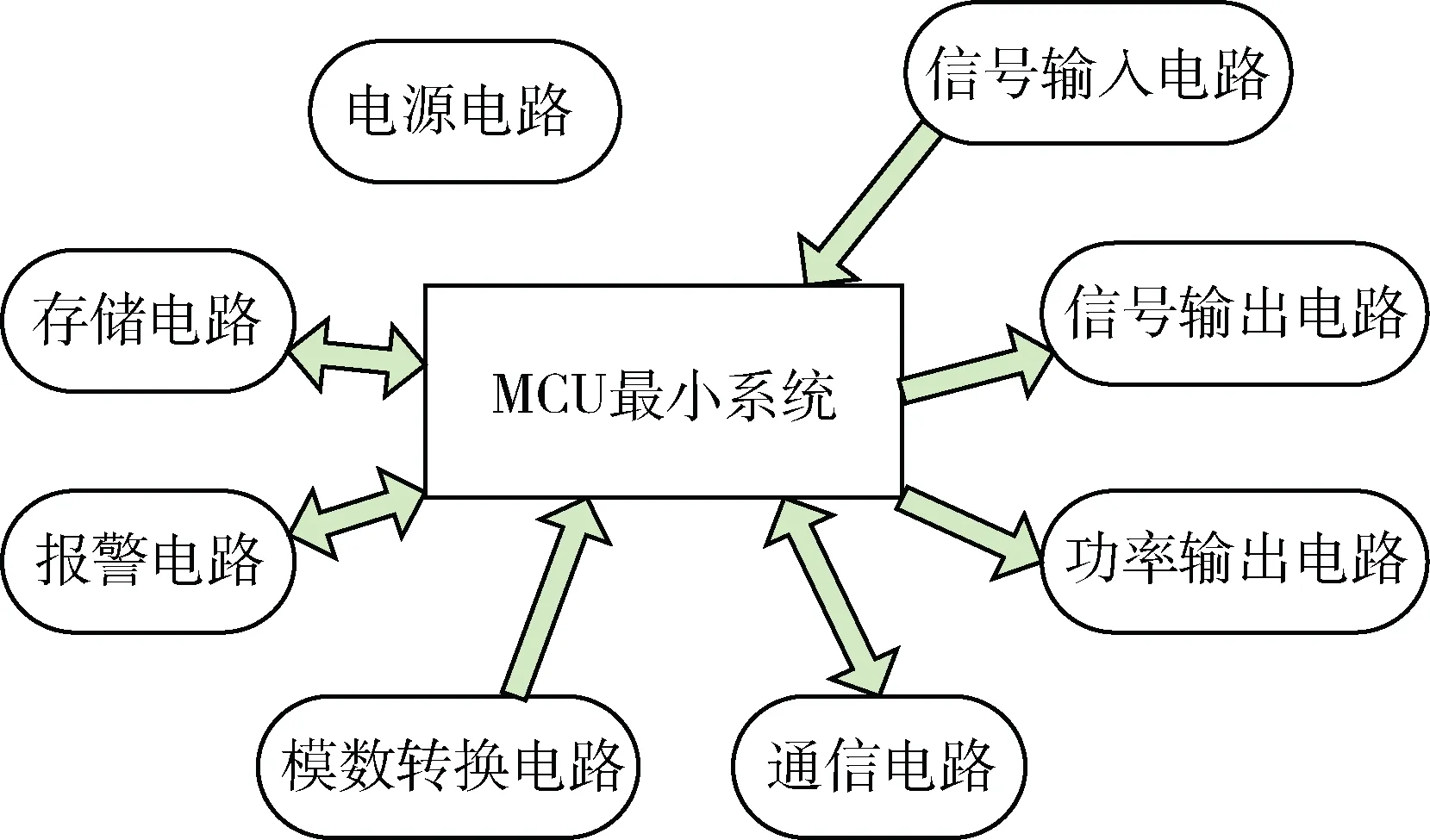
图1 Delta机器人控制器硬件电路整体框图
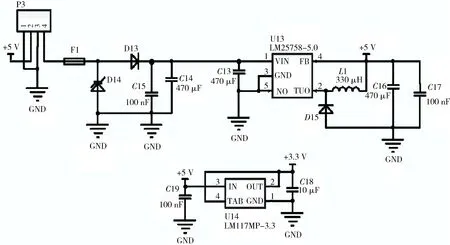
图2 电源电路原理图
1.1 电源电路
如图2所示,标准+24 VDC作为电源输入,经过流和过压保护电路、24 V转5 V的DC/DC开关电源电路变换为+5 VDC,再经过LDO将5 V转为3.3 V。该电路实现了正常供电和异常保护的功能。
1.2 通信电路
TTL通信接口电路从MCU的RXD和TXD直接引出,用于编程下载、调试参数。RS485通信接口电路用于控制器之间信息交互。该电路采用MAX485芯片及外围电阻、电容组成,为防止静电、雷击浪涌,设计有对于AB两路信号的TVS保护管。该电路实现了控制器的正常通信、异常保护等功能。
1.3 信号输入电路
如图3所示,采用光电耦合器PS2801-4与外界输入到控制器的信号进行隔绝,实现了保护板内电路免受外界大电流、强电压信号的冲击。
2 应用与测试分析
2.1 工作性能测试
2.1.1重复上下电测试
由于外部电源不稳定, Delta机器人在快速重复上电和下电过程中,容易出现不开启、程序错乱等安全性故障。而且在下电时,无法提前监测电压以保存当前运行中的数据。
2.1.2重复接插测试
在实际工作应用中,容易出现过MCU的串口被烧坏、MAX485芯片被烧坏等安全性故障。于是需要重新更换MCU和MAX485芯片以完成整体硬件电路的维修工作。
另外,当光电耦合器PS2801-4由于外部强信号冲击而损坏的时候,不仅容易干扰其余三路信号,而且维修时需要整体进行更换。
2.2 静电放电抗扰度测试
静电放电测试中,测试点包含了I/O口、指示灯、电源输入端等裸露在空气中可能受到静电干扰的点,在每个点上,以正负极性各10次、放点间隔为5 s的放电试验,实验电压由2.5 kV依次增加至6.4 kV,在试验中观察被试设备的工作状态。
2.3 雷击浪涌测试
针对控制器硬件周围存在的雷击浪涌干扰,设计了对于控制器硬件的雷击浪涌实验,目的是测试控制器硬件对于雷击浪涌骚扰的承受能力。
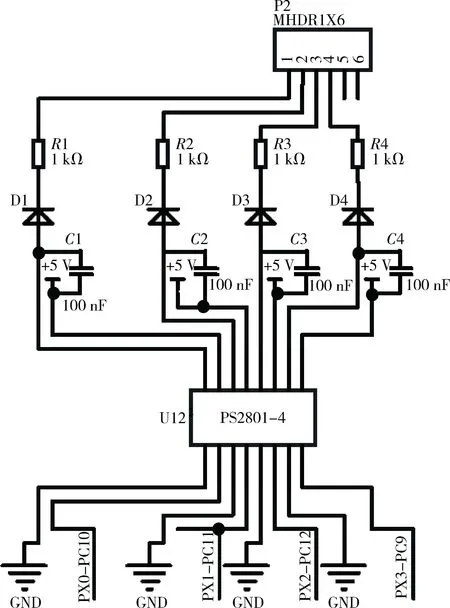
图3 信号输入电路
2.4 射频辐射测试
为了测量控制器硬件的辐射骚扰发射量,进行了微波暗室辐射骚扰量测量,在测试的过程中,控制部分直接暴露在测试环境中,在此种情况下会发生辐射超标问题。
2.5 近场测试
通过测试发现,MCU处在144 MHz频率点出现尖峰,其辐射量达到了30 dBm以上,可以确定此处为144 MHz处辐射超标的辐射源头。另外频率小于50 MHz处的辐射量有整体升高的现象,可以确定此处为与DC-DC开关电源的频率相关的辐射点。通过近场测试发现的144 MHz频率点和小于50 MHz频率范围辐射量升高的现象,可以寻找到辐射源。
3 电路优化设计
对控制器电路在工作性能、静电放电、雷击浪涌、射频辐射、近场方面的测量结果进行分析,选择了较为关键的电源电路、通信电路、信号输入电路、外壳屏蔽和静电释放等方面进行了优化改进,设计了一种更加优化的Delta机器人控制器电路。
3.1 电源电路优化
优化前的电源电路,虽然设计有过流保护电路和过压保护电路,然而,在实际工作应用中仍会出现Delta机器人在快速重复上电和下电过程中机器不开启、程序错乱等安全性故障,以及下电时无法提前监测电压以保存当前运行中的数据的可靠性和功能上的故障。分析发现,在机器人控制器与交流伺服电机驱动器的上下电期间,由于内部均有MCU微控制单元,两者工作均受上电后的数字时序影响,两者重启时间和重启机制也基本不一致,导致了上述故障。
交流伺服电机驱动器为工业成品,一般无法更改,优化后的电源电路中,在过流过压保护电路和24 V转5 V的DC/DC开关电源电路之间增加一路欠压检测电路,如图4所示。当检测到电压低于某电压时,欠压信号发生翻转,供控制器内部MCU微控制单元利用软件进行判断,做出相应动作,消除频繁上下电带来的一系列问题。
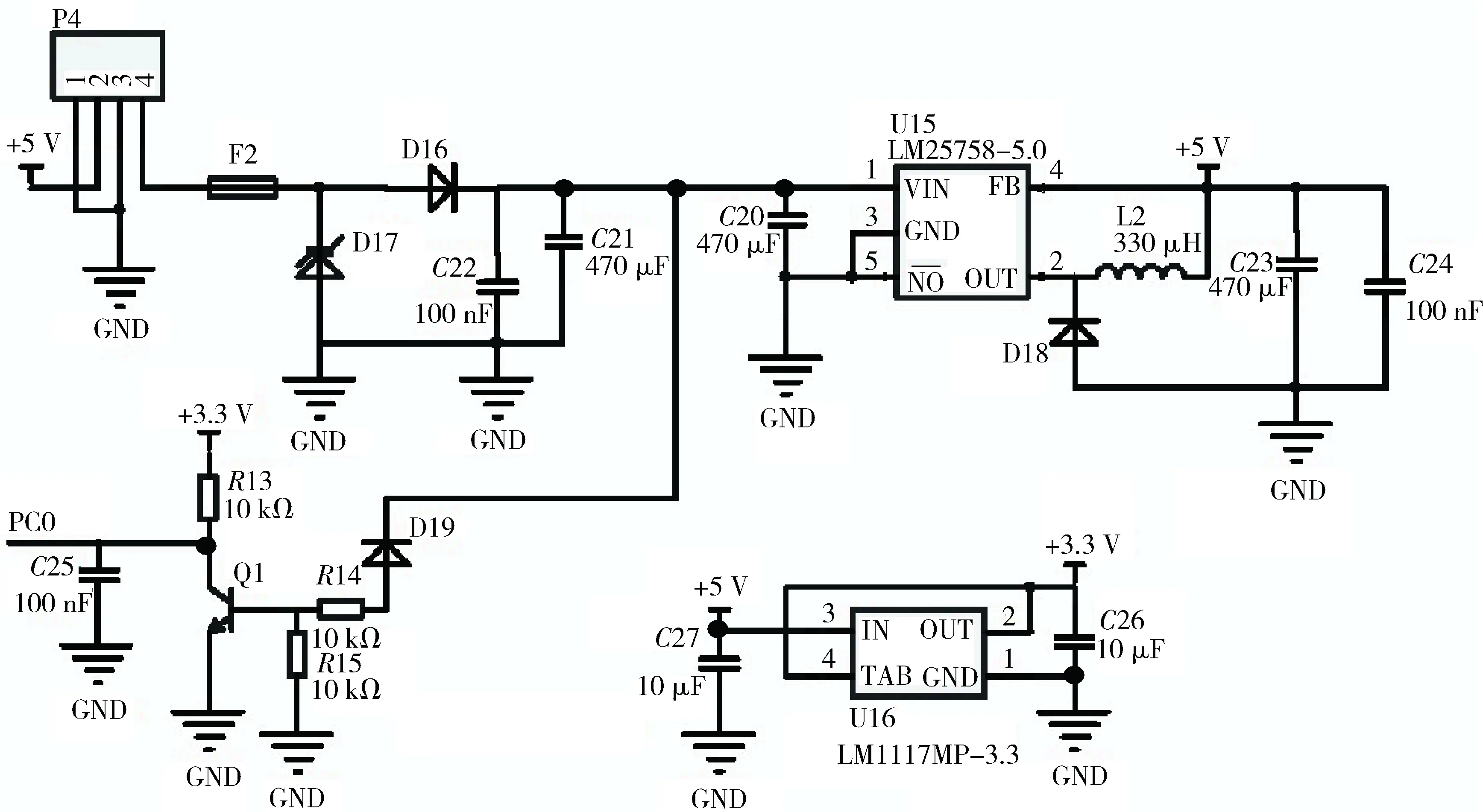
图4 优化后的电源电路原理图
3.2 通信电路优化
虽然在优化前设计有防止浪涌冲击的TVS保护电路,然而在实际应用中仍出现过多次MCU串口被烧坏、MAX485芯片被烧坏等安全性故障。即便串口烧坏不影响MCU的其他性能,但也不得不重新更换MCU才能完成维修工作。由于MCU、MAX485芯片成本较高,且引脚较密,拆卸困难,这样就给维修工作增添了很高的成本。优化后的电路,串联了一个小阻值的贴片电阻,实现了对MCU、MAX485芯片的保护。
3.3 信号输入电路优化
优化前的信号输入电路中,4路集成在一起的光电耦合器比4个单独的光电耦合器及其外围电阻、电容等元件物料成本降低10%以上,有利于降低控制器的初始物料成本。而且由于4路集成导致的电路布局布线的面积比4个单独的光电耦合器及其外围元件组成的电路面积要节省30%以上。但在实际工作中发现,当光电耦合器PS2801-4由于外部强信号冲击而损坏的时候,不仅容易干扰其余3路信号,而且维修时需要整体进行更换,由损坏导致的维护成本将远远超过初始物料成本,且不利于产品的安全性和可靠性,节省电路面积更没有必要。如图5所示,将信号输入电路中的PS2801-4换成4路PS2701-1。优化后的电路实现了后期维护成本的降低,解决了信号间串扰问题。

图5 优化后的信号输入电路
3.4 外壳屏蔽和静电释放电路优化
优化前几乎没有外壳与屏蔽措施。更换成金属外壳后将显著提高其屏蔽效能[9-12](Shielding Effectiveness,SE),对其电场和磁场起到双重屏蔽效果和性能。另外,优化前的PCB固定孔处,与外壳连接的螺丝孔附近的布局布线处理只是简单地与PCB边缘和内部参考GND绝缘,没有考虑静电释放环节。虽然能隔绝控制器电路的静电骚扰,但不利于PCB板内部参考GND的积累电荷向大地有效释放。于是,增加贴片式焊盘,该焊盘有两个约0.7 mm 间距的尖端,能将板内积累电荷通过PCB固定孔传导到金属螺丝,然后通过金属外壳将静电及时释放给大地。优化后的电路提高了控制器的抗静电扰度、降低了射频辐射干扰。
4 对比分析
4.1 工作性能测试
4.1.1快速重复上下电性能
优化之前,当 Delta机器人在快速重复上下电过程中,容易出现不开启、程序错乱等安全性故障,而且在下电时,无法提前监测电压以保存重要数据。优化之后,由于增加一路欠压检测电路,不仅实现了保存重要数据的功能,而且基本消除了异常性故障,测试结果如表1所示。
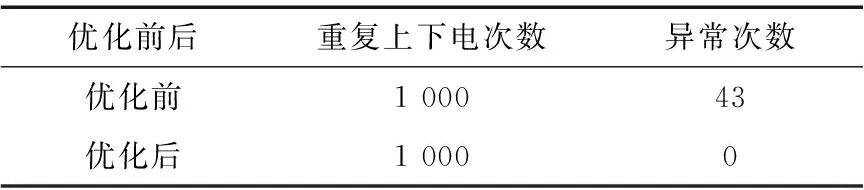
表1 优化前后重复上下电异常情况对比
4.1.2重复接插性能
优化之前,出现过MCU的串口被烧坏、MAX485芯片被烧坏等安全性故障,于是需要重新更换MCU和MAX485芯片以完成整体硬件电路的维修工作。优化之后,基本没有再出现过MCU的串口被烧坏、MAX485芯片被烧坏的现象,测试结果如表2所示。
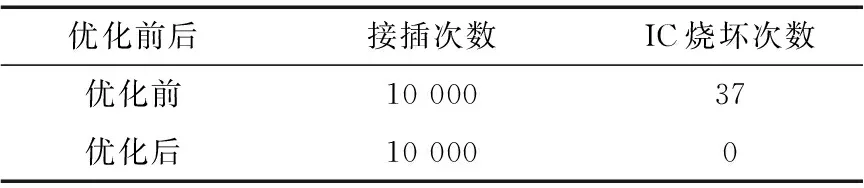
表2 优化前后IC烧坏情况对比
优化之前,当光电耦合器PS2801-4的1路信号受冲击损坏时,不仅干扰其余3路信号,而且维修时需整体更换。优化之后,1路损坏后在维修时也只是更换1路器件,由此增加的物料成本减少70%以上,测试结果如表3所示。

表3 优化前后所增维修物料成本对比
4.2 静电放电抗扰度测试
优化之前,当静电电压超过5.5 kV时,虽未出现死机和损坏,但机器人开始出现抖动现象。优化之后,当静电电压超过5.8 kV时,工作正常,在6.4 kV时才出现抖动现象,测试结果如表4所示。
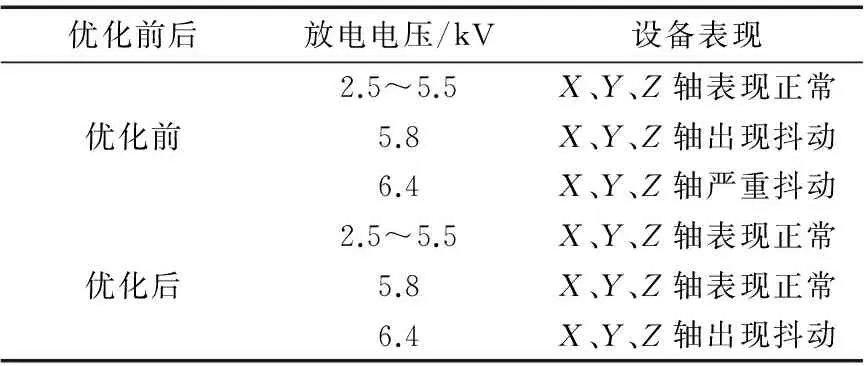
表4 静电放电优化前后对比
4.3 雷击浪涌测试
优化前后的雷击浪涌测试情况如表5所示,当进行共模试验时,4.2 kV时还能够稳定工作,电压再增加设备才出现了抖动现象,对比之前在4.2 kV时就出现抖动的现象,在性能指标上有明显提高。
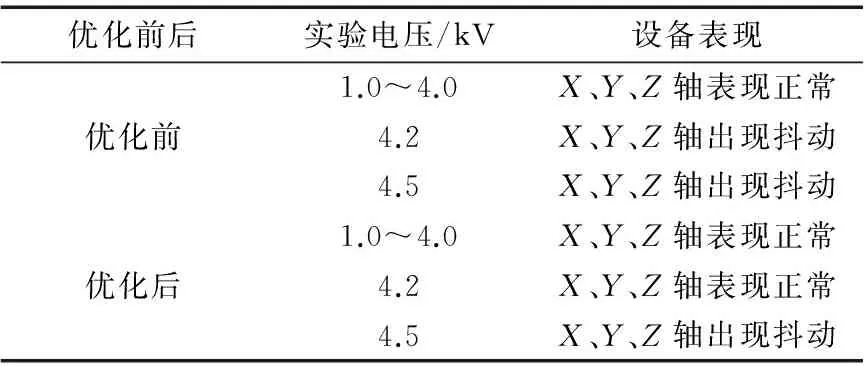
表5 雷击浪涌优化前后对比
4.4 射频辐射测试
优化之前,与EN55022的测试标准线对比,有多项射频辐射指标超出标准线。在频率为30 MHz左右时,辐射量出现了一个小高峰。在144 MHz处出现了非常明显的几个辐射超标的频率点,且峰值较为集中。经过外壳和屏蔽等优化之后,在各个频段处,辐射量都有一个整体的下降,控制器的辐射发生量有了明显的减少,没有辐射超标的频点,并且个频段的辐射发射量与标准值之间有充足的裕量。
5 结论
结合Delta机器人设计和试用中出现的问题,对其控制器硬件电路进行工作性能、静电放电、雷击浪涌、射频辐射特性等方面的测试和分析,根据测试分析结果对控制器硬件电路进行优化设计,这种方法有利于提高Delta机器人的安全性、可靠性和可维护性。通过对优化前后的Delta机器人进行测试对比分析,结果表明,经过这种方法设计实现的Delta机器人有明显的优势。
[1] 刘振宇,郝明,赵彬,等.工业机器人在线仿真系统研究[J].微型机与应用,2014,33(6):84-86,91.
[2] 王洁. 2017年工业物联网的机遇在哪里?[J]. 电子技术应用,2017,43(2):4-5.
[3] 恩格尔伯格. “机器人之父”致中国读者的信[J].机器人技术与应用,1996(1): 2-3.
[4] CLAVEL R. Device for displacing and positioning an element in space[P].WO1987003528A1,1987-06-18.
[5] CLAVEL R.Device for the movement and positionning of an element in space[P].US: US4976582A,1990-12-11.
[6] 陈学生,陈在礼,孔民秀.并联机器人研究的进展与现状[J]. 机器人, 2002,24(5):464-470.
[7] 从爽, 尚伟伟. 并联机器人: 建模, 控制优化与应用[M]. 北京: 电子工业出版社, 2010.
[8] MERLET J. Parallel robots[M].Springer Science & Business Media, 2006.
[9] 肖冬萍,袁军,何为,等.高空核爆电磁脉冲对便携式监护仪的辐射效应[J].高电压技术, 2011,37(7): 1733-1738.
[10] 高成,刘晓,石立华,等.低频强磁场屏蔽效能的测试方法与测试设备研制[J].高电压技术, 2010,36(9):2272-2277.
[11] 王化吉,王永忠,张文.箱式屏蔽效能测试方法设计[J].安全与电磁兼容, 2010(2): 1-3.
[12] 曲兆明,王庆国,程二威.混响室内基于统计特性的屏蔽效能测试[J].高电压技术, 2009,35(12): 3037-3041.
西门子扩展数字化科里奥利质量流量测量产品系列,助力过程优化
西门子Sitrans FCT030和FCT010数字转换器现已能够与口径范围为DI 1.5~DN 15的Sitrans F C MASS 2100和Sitrans FC300系列科里奥利质量流量传感器配对使用,从而将数字化科里奥利流量计平台的众多过程优化优势扩展到小流量应用领域,如液体和气体的配料、定量给料和灌装等。得益于该产品线的重大改进,化工和汽车行业的客户都将受益于市场领先的0.1%质量流量精度、0.5 kg/m3密度精度和100 Hz信号处理,而啤酒灌装等应用也得以确保最佳精度。
科里奥利流量计系列进一步扩大的产品范围使之涵盖了石油天然气、船舶和化工行业中常用的大口径应用。Sitrans FCS400系列传感器从原来支持DN 15-DN 80口径,扩展到DN 100和DN 150,使其应用范围从OEM和卫生行业控制回路扩展到陆上/海上贸易交接、船舶加油和大规模化工测量等。FCS400是市面上极紧凑的一款科里奥利质量流量传感器,它外形牢固,不受过程干扰影响,同时拥有大量适用于通用标准、卫生和NAMUR标准应用的定制过程接口。
西门子还对转换器产品线做出了大量改进,以便实现更佳的安装灵活性和操作简便性。FCT030推出了墙装式外壳支持远传型配置,并可选配Modbus或PROFIBUS DP/PA数字通信,这是在过程中实现数据快速交换的最佳协议。原本就拥有直观式菜单结构和多种设置向导的全图形人机界面(HMI)也得到了重新设计,菜单布局更加易于操作。创新的SensorFlash®microSD卡功能也更加丰富,提供了先进的数据储存和审计跟踪功能,每次记录可储存100条过程参数、诊断参数或设备设置变更信息。操作人员借此可以分析各个过程的性能并解决任何潜在的问题,从而优化工厂效率,以生产出更优质的终端产品。
(西门子公司供稿)
Circuit optimization design of Delta robot controller
Wang Lei1,2, Tang Lijun1,2
(1. School of Physics and Electronic Sciences, Changsha University of Science & Technology, Changsha 410114, China;2. Hunan Province Higher Education Key Laboratory of Modeling and Monitoring on the Near-Earth Eletromagnetic Environments, Changsha 410114, China)
For solving the problem on Delta robot’s safety, reliability and maintainability, a method to design a high performance Delta robot is proposed that is applied to the delta robot’s trial situation. The property of the controller is studied and analyzed, including performance of the hardware circuit, static discharge, lightning surge and RF radiation characteristics. It is optimized and improved for the key circuits such as power circuit, communication circuit, signal input circuit, shell shielding and electrostatic releasing of Delta robot controller. The test results show that the performance of the improved controller hardware circuit is greatly improved contrast to the past, and it is improved also about the Delta robot safety, reliability and maintainability. The method is useful for designing and creating any robots.
Delta robot; controller circuit; Delta robot optimization design
TP242.6
A
10.19358/j.issn.1674- 7720.2017.20.001
王磊,唐立军.Delta机器人控制器电路优化设计[J].微型机与应用,2017,36(20):1-5,9.
2017-03-30)
国家科技支撑计划(2014BAH28F04);湖南省教育厅科学研究项目(15K009);湖南省研究生科研创新项目(CX2016B419)
王磊(1983-),男,硕士,工程师,主要研究方向:信号检测与处理。
唐立军(1963-),男,博士,教授,硕士生导师,主要研究方向:信号检测与处理。
猜你喜欢
小哥白尼(趣味科学)(2022年2期)2022-05-25 13:20:58
科学大众·小诺贝尔(2016年11期)2017-01-10 21:02:35
创新作文(小学版)(2016年16期)2016-11-11 05:47:47
工业设计(2016年4期)2016-05-04 04:00:29
通信电源技术(2016年1期)2016-04-16 04:57:24
通信电源技术(2016年3期)2016-03-26 07:13:16
电子设计工程(2015年6期)2015-02-27 12:05:04
发明与创新(2015年1期)2015-02-27 10:38:25
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17