
具有随机时延和丢包的网络化离散系统的动态输出反馈H∞控制
2017-11-02 04:07李艳辉李玉龙
化工自动化及仪表 2017年1期
李艳辉 李玉龙
(东北石油大学电气信息工程学院)
具有随机时延和丢包的网络化离散系统的动态输出反馈H∞控制
李艳辉 李玉龙
(东北石油大学电气信息工程学院)
针对前向通道和反馈通道均存在随机时延和丢包现象的网络控制系统(NCSs),研究了关于离散时域下鲁棒H∞控制器的设计问题。采用伯努利分布描述随机时延和丢包现象,将闭环NCSs建模为随机参数系统。根据Lyapunov稳定性理论和增广状态空间法,得到闭环NCSs均方指数稳定的H∞性能判据;利用LMI技术和锥补线性化算法,给出动态输出反馈控制器的设计方法。最后,把这种方法应用于搅拌斧反应器中,仿真验证了所提控制器设计方法的有效性。
网络控制系统 时延和丢包 动态输出反馈H∞控制器 线性矩阵不等式 搅拌釜反应器
目前,网络控制系统(Networked Control Systems,NCSs)被广泛应用于各类工业控制领域,如化工生产、遥感机器人及航空航天等。然而,受网络带宽、传输速率等约束条件的影响,信息在传输过程中会出现随机时延和丢包的现象,这将严重影响系统的稳定性和控制性能。近年来,具有时延和丢包问题的NCSs已经成为国内外控制领域的一个研究热点[1,2]。文献[3]通过增广状态空间法,对前向通道和反馈通道均存在短时延和丢包的NCSs,将NCSs建模为包含4个子系统的线性切换系统,并设计了低保守性的鲁棒H∞控制器。文献[4]研究了一类具有混合时延和丢包的非线性NCSs,解决了含有无穷分布时滞的滤波器设计问题。文献[5]将传感器和滤波器之间存在随机时延和多丢包的NCSs建模为随机参数系统,降低了结果的保守性。在实际应用中,信号通过网络传输时会伴随时延和丢包现象,故必须分析前向通道和反馈通道通信约束对系统的影响。然而文献[6,7]只考虑网络中的随机时延现象,对丢包现象缺少进一步的研究。另外,一些文献对时延和丢包做了合并[8]或给出了假设条件,有失一般性。在考虑双通道通信约束且不做合并和假设的情况下,笔者应用状态增广思想,针对网络化离散系统设计了动态输出反馈控制器。
笔者采用伯努利0-1分布描述通道中存在的随机时延和丢包过程,建立随机参数系统模型,并利用LMI技术和锥补线性化算法设计动态输出反馈控制器,使得闭环NCSs均方指数稳定且满足给定的H∞控制性能。
1 问题的描述
网络化控制系统如图1所示,时延和丢包同时存在于前向通道和反馈通道中。
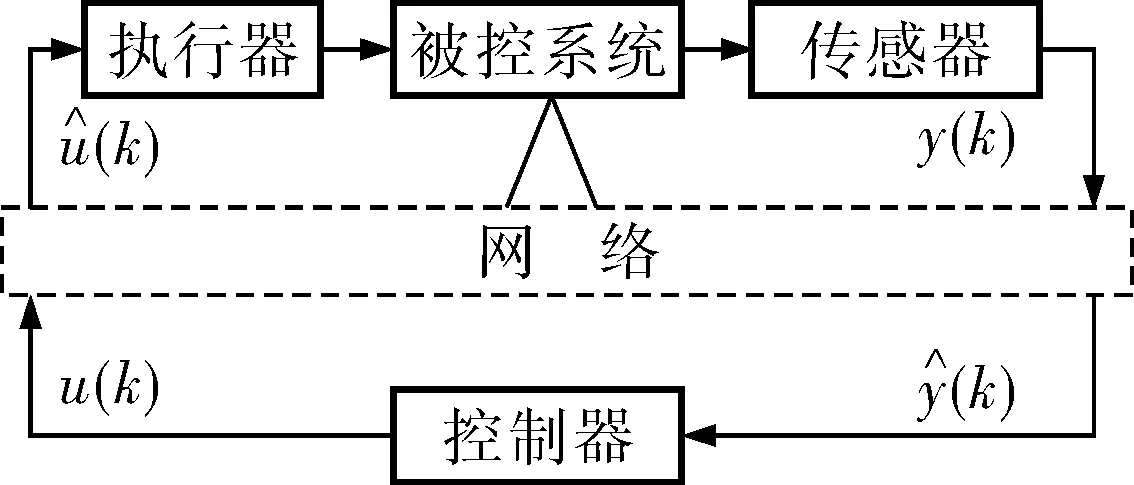
图1 具有时延和丢包的网络控制系统结构框图
考虑如下离散系统被控对象模型:
(1)
系统的测量方程为:
(2)
设计如下的输出反馈控制器:
(3)

给出如下伯努利分布的统计概率和统计特性:

(4)

(5)
结合式(1)~(3),得到如下闭环控制系统:
(6)

v(k)=[wT(k)wT(k-1)]T

(7)




Ad1=-Ac1Ad2=-Ac2
Ad3=Ac2Ad4=Ac1

Dd2=-Cc2Dd3=Cc2
定义1对∀ξ(0)≠0,存在κ≥1,0<τ<1,使得E{‖ξ(k)‖2}≤κτkE{‖ξ(0)‖2}成立,则系统被称为均方意义下指数稳定的。
笔者的目标是设计输出反馈控制器(3)满足:
a. 当外部扰动v(k)=0时,闭环系统(6)均方指数稳定;

引理1V(ξ(k))为Lyapunov函数,若存在ρ≥0、φ>0、φ>0和0<ψ<1使得φ‖ξ(k)‖2≤V(ξ(k))≤φ‖ξ(0)‖2,E{V(ξ(k+1))|ξ(k)}-V(ξ(k))≤ρ-ψV(ξ(k))成立,则有E{‖ξ(k)‖2}≤(φ/φ)(1-ψ)kE{‖ξ(0)‖2}+ρ/φφ。
2 H∞性能分析
本节笔者建立了满足闭环网络控制系统(6)均方意义下指数稳定且满足H∞性能约束的动态输出反馈控制器存在的充分条件,为下文控制器的设计奠定基础。

(8)
成立,则闭环系统(6)是均方意义下指数稳定的且满足给定的H∞性能指标γ。
其中:


证明选取Lyapunov函数为Vk(ξ(k))=ξT(k)Pξ(k)+ξT(k-1)Rξ(k-1)。其中,P=diag{P1,P2}和R=diag{R1,R2}为正定对称矩阵。

根据Schur补引理,由式(8)可得Ξ的展开式小于0,所以有E{Vk+1(ξ(k+1))|ξ(k)}-Vk(ξ(k))=ηT(k)Ξη(k)<0,故ηT(k)Ξη(k)≤-λmin(-Ξ)ηT(k)η(k)≤-εηT(k)η(k)。其中,0<ε≤λmin(-Ξ)。则存在0<ε≤φ,其中φ=max{λmax(P),λmax(R)},满足E{Vk+1(ξ(k+1))|ξ(k)}-Vk(ξ(k))≤-εVk(ξ(k))/φ=-ψVk(ξ(k)),0<ψ<1。而且φ‖ξ(k)‖2≤Vk(ξ(k))≤φ‖ξ(k)‖2,其中φ=min{λmin(P),λmin(R)}。
由引理1,知E{‖ξ(k)‖2}≤(φ/φ)(1-ψ)kE{‖ξ(0)‖2},可得闭环系统(6)是均方指数稳定的。


3 动态输出反馈H∞控制器设计
基于定理1,笔者利用LMI技术,并采用全等变换和变量替换法,得出动态输出反馈控制器的参数设计方法。

(9)
(10)
(11)
成立,那么闭环系统(6)是均方意义下指数稳定的,并且满足给定的H∞控制性能γ。
其中:

I2=diag{I,I}

同时,动态输出反馈控制器为:
(12)


(13)
变量替换后即可得到式(9)。另外,控制器对应的传递函数形式为:
G(z)=Cc(zI-Ac)-1Bc
(14)
由此得到控制器的参数设计(12)。而式(10)、(11)容易获得,可参考文献[6] 和文献[9]。证毕。
注3:定理2中控制器参数的求解需采用锥补线性化算法,具体算法如下:



4 实例仿真
控制器的应用对象为搅拌斧反应器,其结构如图2所示。
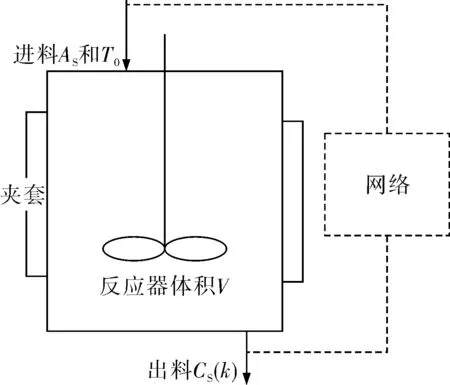
图2 网络环境下搅拌斧反应器结构
物料以一定浓度As和温度T0进入反应器,通过不断调整冷却剂温度T(k)使生成物浓度Cs(k)和反应器温度Ts(k)满足生产要求。选取无量纲参数:流量Fs=0.031,体积V=100,反应物起始浓度Cs(0)=0.313,速率系数分别为k1=0.127,k2=0.071,k3=0.008。通过定义以下变量进行无因次化转换[10,11]:

Cc=[-0.0179 0.0099]
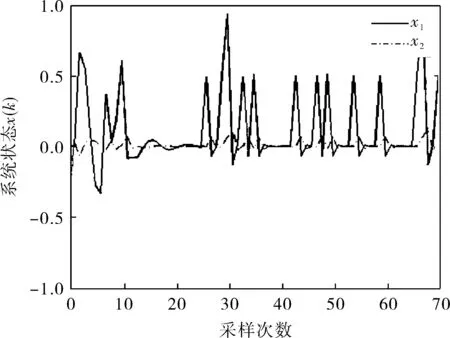
图3 开环系统的状态响应曲线
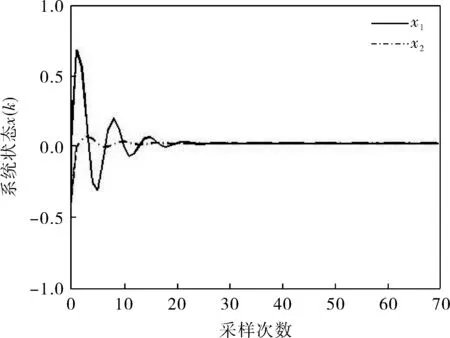
图4 闭环系统的状态响应曲线
5 结束语
基于Lyapunov稳定性理论,利用增广状态空间法和LMI技术,采用伯努利分布描述离散时域下NCSs中存在的随机时延和丢包问题,将NCSs建模为随机参数系统,并给出了动态输出反馈H∞控制器的设计方法。将它应用于搅拌斧反应器中,仿真验证了所提控制器设计方法的有效性,所得的结果为该方法扩展到化工生产中提供了理论参考。
[1] 马卫国, 邵诚.网络控制系统随机稳定性研究[J].自动化学报, 2007, 33(8): 878~882.
[2] 游科友, 谢立华.网络控制系统的最新研究综述[J].自动化学报, 2013, 39(2): 101~118.
[3] 李玮, 王青, 董朝阳. 具有短时延和丢包的网络控制系统鲁棒H∞控制[J].东北大学学报(自然科学版), 2014, 35(6): 774~779.
[4]YangRN,ShiP,LiuGP.FilteringforDiscrete-TimeNetworkedNonlinearSystemswithMixedRandomDelaysandPacketDropouts[J].IEEETransactionsonAutomaticControl, 2011, 56(11): 2655~2660.
[5]LiXY,SunSL. H∞FilteringforNetworkedLinearSystemswithMultiplePacketDropoutsandRandomDelays[J].DigitalSignalProcessing, 2015, 46: 59~67.
[6] 王武, 林琼斌, 蔡逢煌, 等. 随机时延网络控制系统的H∞输出反馈控制器设计[J]. 控制理论与应用, 2008, 25(5): 920~924.
[7]YangFW,WangZD,HungYS,etal. H∞ControlforNetworkSystemswithRandomCommunicationDelays[J].IEEETransactionsonAutomaticControl, 2006, 51(3): 511~518.
[8]Garcia-RiveraM,BarreiroA.AnalysisofNetworkedControlSystemswithDropsandVariableDelays[J].Automatica, 2007, 43(12): 2054~2059.
[9]LuLL,YangR,XieLH.RobustH2andH∞ControlofDiscrete-timeSystemswithPolytopicUncertaintiesviaDynamicOutputFeedback[C].ProceedingsofAmericanControlConference.Piscataway:IEEE, 2006: 4315~4320.
[10] 李艳辉, 冯岩. 基于T-S模型的连续搅拌反应釜鲁棒L2-L∞控制[J]. 吉林大学学报(信息科学版), 2014, 32(3): 247~253.
[11] Liu A D, Yu L,Zhang W A. Moving Horizon Estimation for Networked Systems with Multiple Packet Dropouts[J].Journal of Process Control, 2012,22 (9): 1593~1608.
DesignofDynamicOutputFeedbackH∞ControllerforNetworkedDiscreteTimeSystemswithRandomPacketDropoutsandTimeDelays
LI Yan-hui, LI Yu-long
(CollegeofElectricalEngineeringandInformation,NortheastPetroleumUniversity)
Considering the fact that random time delays and packet dropouts exist in the networked control systems’(NCSs) forward channel and feedback channel, the robustH∞control in discrete-time domain was studied. Having Bernoulli distributions adopted to describe the random time delays and packet dropouts and the closed-loop NCSs modeled as stochastic parameter systems. Based on Lyapunov stability theory and augmented state-space method, aH∞criterion was obtained for the mean-square exponential stability of the closed-loop NCSs. By using the linear matrix inequality(LMI) technique and the cone complementary linearization algorithm, a design method for the dynamic output feedback controller was presented. Applying this method to the stirred tank reactor proves the effectiveness of the proposed method for the controller design.
networked control system, time delays and packet dropouts, dynamic output feedbackH∞controller, linear matrix inequality, stirred tank reactor
TP273
A
1000-3932(2017)01-0006-07
国家自然科学基金项目(61673102);中国高等教育机构博士基金项目(20132322120003);黑龙江省自然科学基金项目(F201403);黑龙江省博士后科学研究发展基金项目(LBH-Q13177);东北石油大学培育基金项目(XN2014112)。
李艳辉(1970-),教授, 从事鲁棒控制、滤波和智能控制方向研究工作, LY_hui@hotmail.com。
2016-06-29,
2016-08-25)
猜你喜欢
科技风(2021年19期)2021-09-07
中国交通信息化(2020年4期)2021-01-14
通信电源技术(2020年8期)2020-07-21
今日中国·法文版(2020年7期)2020-07-04
电子制作(2019年23期)2019-02-23
黑龙江电力(2017年1期)2017-05-17
系统工程与电子技术(2016年4期)2016-08-24
系统工程与电子技术(2016年7期)2016-08-21
现代防御技术(2016年1期)2016-06-01
探测与控制学报(2015年4期)2015-12-15
