
海水温盐深剖面测量技术综述
2017-11-01 06:58张龙叶松周树道刘凤韩月琪
海洋通报 2017年5期
张龙,叶松,周树道,刘凤,韩月琪
(国防科技大学 气象海洋学院,江苏南京211101)
海水温盐深剖面测量技术综述
张龙,叶松,周树道,刘凤,韩月琪
(国防科技大学 气象海洋学院,江苏南京211101)
温盐深是反应海洋物理学特性的重要参数,是海洋水文观测的基本要素。CTD剖面仪(Conductivity-Temperature-Depth profiler)是进行海水温盐剖面观测的主要仪器,利用CTD剖面仪可精确测得水下不同深度上海水的温度和电导率参数,进而能够推算出海水盐度、密度、声速等相关信息,对于海洋经济开发、海上国防建设、海洋环境保护等都具有非常重要的意义。本文介绍了温盐深剖面测量技术的基本原理与发展现状,对几种典型的温盐深测量设备及各种海洋观测平台中搭载的CTD传感器进行了介绍,论述了CTD传感器的标定和测试技术,并对其发展趋势进行了分析。
温度测量;盐度测量;深度测量;CTD剖面仪;传感器技术;发展趋势
海洋覆盖了地球表面积的70%以上,与人类生活息息相关。随着全球气候快速变化,研究海洋的重要性日益凸显(Mowlem et al,2008)。温盐深剖面仪(Conductivity-Temperature-Depth profiler,简称CTD剖面仪)是测量海洋物理特性的重要工具,它为海洋学家提供了不同深度下精确的海水温度和盐度等参数,从而能够更加准确地揭示海洋的基本物理特性(Fan et al,2010),对于海洋经济开发、军事力量建设、海洋环境保护等具有非常重要的意义。
在数十年的发展过程中,美国的CTD测量技术一直走在世界前列,著名的CTD生产厂家有SeaBird(海鸟),FSI,YSI等。日本的CTD产品与海洋调查紧密结合,致力于小型低功耗产品的研发,注重发展链式系留传感器测量技术(张兆英,2003)。同时,将海洋生物学、光学、化学等要素纳入到测量范畴,向着多传感器综合测量方向发展。英国、意大利等欧洲国家也始终走在CTD测量技术的前列。意大利Idronaut公司研发的300系列CTD,采用大口径七电极电导率传感器,传感器性能得到明显改善,并且采用A/D转换电路代替了海鸟公司产品采用的振荡器设计,在同类产品中具有较高的竞争力。近年来,我国的CTD测量技术发展迅速,相继成功研制了船体固定式、拖曳式、抛弃式等多种CTD测量仪器。虽然研制成功的高精度CTD的技术指标已接近世界先进水平(张兆英等,2002),但是仍存在自主创新能力不强,数据采集速度较慢,集成化程度不高,智能化程度较低,仪器长期稳定性不佳等技术短板。
目前,CTD产品正向着低功耗、模块化、智能化、多参数方向发展,同时注重提高传感器的测量精度和长期稳定性,以获得更高精度和分辨率的观测数据(Petitt et al,2005)。防生物附着技术仍然是该领域的研究重点。随着深远海发展战略的逐步推进,深海温盐深测量技术已成为该领域的研究热点。
1 温盐深传感器发展概况
在温盐深剖面仪中,温度、电导率和深度传感器是水文要素测量的最终执行者。在过去几十年中,CTD传感器的发展大致经历了以下三个阶段(牛付震,2009):
(1)基于模拟补偿算法的STD(Salinity,Temperature,Depth)阶段:在此过程中,盐度数据大多是通过模拟补偿算法获得的,由此引出了“温度补偿”、“压力补偿”等概念。其基本方法是模拟海水电导率与温度、压力的关系,用温度和压力数据对电导率进行补偿,最终由电导率直接计算出盐度。
(2)基于数字化存储和通信的CTD传感器:该阶段的主要特征是不再将传感器的输出信号转化为频率信号或模拟信号,而是将其转化为数字信号,进行数字化的存储和传输。数字化测量具有更高的分辨率和更强的抗干扰能力,有助于实现水上设备的数字化存储和显示。
(3)智能化的CTD传感器:微处理器的应用使温盐深测量实现了智能化。其智能化特征主要体现在以下两个方面:将传感器的定标数据存储到微处理器中,在测量过程中可对传感器进行零点和满量程校正,有效提高了测量的准确性;水下微处理器和通用异步收发器的运用,使得水上设备和水下探头可通过数据传输电缆进行双向对话。
目前,CTD剖面仪搭载的温度传感器主要有热敏电阻和铂电阻两种类型。两者均具有较高的测量精度和稳定性,差别在于:铂电阻传感器的特性曲线基本满足线性关系,且相同尺寸的铂电阻阻值小于热敏电阻;热敏电阻的特征函数为指数特征,阻值较大,灵敏度高,响应时间为60 ms,稳定性可达0.001益/年。
由于受加工工艺和材料的限制,电导率传感器一直是CTD测量技术的研究重点。现有的电导率传感器主要分为感应式和电极式两类,其标称精度已达到0.001 mS/cm(潘乐乐,2015)。感应式电导率传感器结构坚固,性能稳定,响应速度快,但是易受电磁干扰,难以保证使用过程中的测量精度。电极式传感器又可分为两电极、三电极、四电极、七电极四种类型,具有较强的抗干扰能力和较高的测量精度,但是时间常数较大,易污染,且清洗过程复杂(兰卉,2012)。意大利Idronaut公司的OCEAN SEVEN 316 plus型CTD采用七电极电导率传感器,可在现场清洗而不用重新校准,方便集成到浮标系统、ROV和AUV等移动观测平台中。
压力传感器主要分为硅阻式和应变式两种类型,测量精度为0.1%FS左右。海鸟公司的SBE 911 plus CTD产品采用带有温度补偿的石英压力传感器,其测量精度可达0.01%FS。几种典型CTD传感器的技术指标如表1所示。
2 典型的温盐深剖面测量设备
在数十年的研究过程中,不同的应用需求催生了多种类型的温盐深剖面测量设备,其中包括船用绞车布放式、拖曳式、抛弃式以及搭载在各种海洋观测平台上的温盐深剖面测量设备。
2.1 船用绞车布放式温盐深剖面仪
绞车布放式温盐深剖面仪广泛应用于海洋调查中,是目前应用最多的温盐深剖面测量设备。其中最具代表性的是海鸟公司的SBE 911Plus CTD剖面仪。
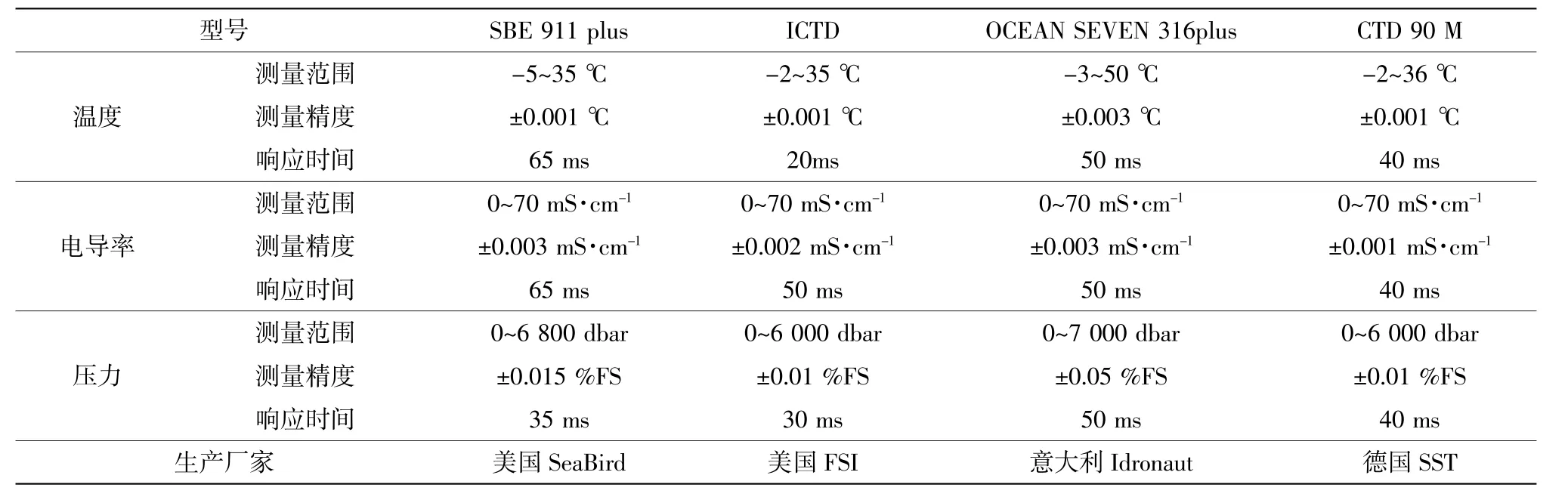
表1 几种典型CTD传感器的技术指标
SBE 911plus CTD剖面仪搭载的传感器采用模块化设计,能够快速准确的获取海水的温度、电导率和深度参数。同时,还可以根据测量需要搭载溶解氧、pH值等其他类型的传感器,进行多要素海洋观测。SBE 911plus观测系统主要包括SBE 9 plus CTD单元、SBE 11甲板单元、SBE 17 plus SEARAM存储单元和SBE 32采水器。其结构如图1所示。
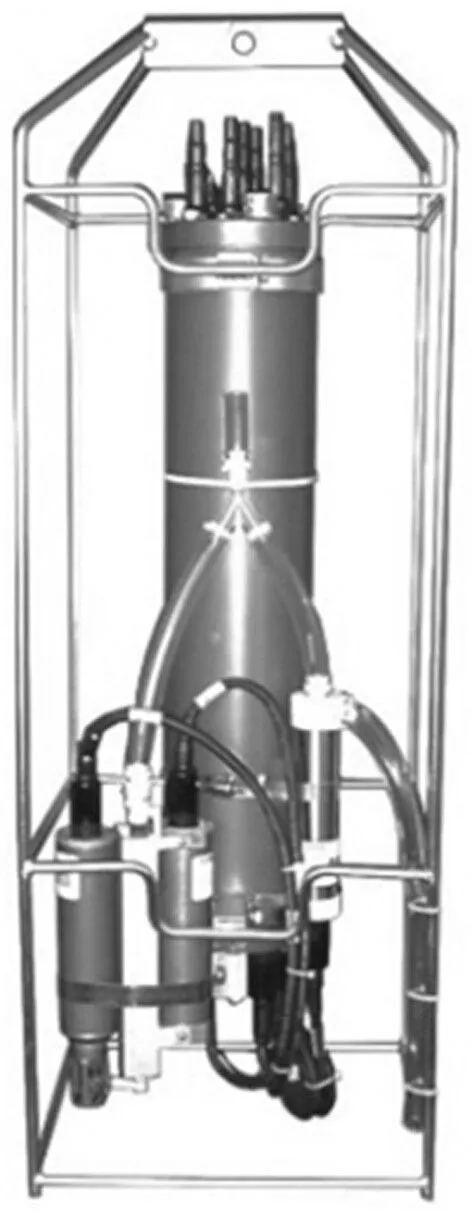
图1 SBE 911Plus CTD剖面仪
SBE 9 plus CTD单元是温盐深要素测量的主要执行者,其内部安装有电导率、温度和带温度补偿的高精度石英压力传感器。为减小船体升降引起的盐度尖峰效应,采用TC导管将温度和电导率传感器联接在一起,通过水泵迫使海水以恒定速率通过感温原件和电导池,从而可以准确获取同一水团的温度和电导率数据(郭斌斌等,2015)。
SBE 11 plus甲板单元包含RS-232及IEEE-488计算机通信接口、115/230VAC转换开关、盒式磁带备份记录仪接口、原始数据LED显示器和触底声音报警设备。系统的标定系数存贮在EPROM中,微控制器可将原始CTD数据转换为温度、盐度和深度。
SBE 17 plus SEARAM是整个系统的控制单元,同时为SBE 9 plus CTD单元和SBE32采水器提供电源。通过系统程序,可以将数据采样间隔、采水器触发深度等参数预先输入到SEARAM中,因此可实现数据采集、存储及采水器触发的自动化。SBE32采水器采用磁开关触发方式,提高了采水器的可靠性。
图2为SBE 911Plus CTD剖面仪布放过程示意图,其布放过程大致可概括为以下几个步骤:安装调试、参数设置、设备布放、下降过程中测量、上升过程中采水、设备回收、数据下载及处理。
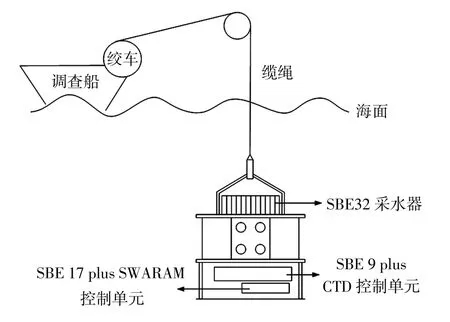
图2 SBE 911Plus CTD剖面仪布放方式
2.2 拖曳式温盐深剖面仪
与传统CTD剖面仪的工作方式不同,拖曳式温盐深剖面仪(Underway Conductivity-Temperature-Depthprofiler,简称UCTD)可在船舶航行过程中实现大面积、连续、快速的温盐剖面测量,测量结果具有更强的实时性和代表性,且具有更高的测量效率(张兆英等,2004)。拖曳式CTD剖面仪是研究海洋动力学和海洋水文要素的重要监测仪器,是观测内波和海洋上边界层物理特性的有效手段。拖曳式CTD剖面仪的观测数据不仅可以为海洋观测系统中各种传感器的定标提供基本参数,而且可与卫星遥感资料相结合,形成对海洋水文特征的立体描述(Rudnick et al,2007)。
国外对拖曳式CTD观测系统的研究起步较早。加拿大贝德福海洋研究所研制的Batfish拖曳式CTD观测系统是较早引入我国的型号之一。加拿大的BROOKE公司在拖曳深度的研究中处于领先,其研制的MVP型UCTD最大拖曳深度可达3400m。另外,美国YSI公司生产的V-FIN和英国公司生产的U-TOW和Sea Soar也是较为流行的UCTD品牌。表2列举了几种国外流行的拖曳式CTD剖面测量设备。

表2 国外流行的拖曳式CTD型号
拖曳式CTD测量系统主要由搭载有CTD传感器的水下拖曳体、船用轻便绞车和缆绳等构成。拖曳体由船尾布放,投放后做自由落体运动,绞车在无动力状态下迅速释放缆绳,拖曳体在水中以近似垂直的轨迹下沉,并进行剖面温盐深数据的测量。当缆绳即将放尽时,绞车紧急制动,并开启绞车电机回收缆绳和水下拖曳体(任炜等,2008)。拖曳体出水后可进行数据下载、数据处理和电池充电等工作。
根据不同的应用需求,拖曳式CTD可分为以下几种类型:根据拖曳体的结构差异,可将其分为嵌入式拖曳CTD和外挂式拖曳CTD。嵌入式拖曳CTD采用固定结构,将CTD剖面仪及其驱动结构安装在一个封闭的拖曳体中。因拖曳体具有固定的结构,故其运行姿态和升降速度可精确控制,从而降低了设计制造的难度。缺点是采取拖曳体开孔的方式实现CTD传感器周边海水的交换,在拖曳行进过程中,交换过程不够充分,从而影响了CTD的测量精度。外挂式拖曳CTD采用开放式结构,即CTD传感器及其驱动结构直接悬挂于拖曳体外侧,虽然解决了CTD传感器与海水的交换问题,但是开放式结构使得拖曳体的运行姿态和升降速度难以精确控制。
另一种分类依据是拖曳体的运行姿态,据此可将拖曳式CTD分为平行直线型、正弦曲线形和垂向直线型。平行直线型拖曳CTD拖曳体的运动轨迹为与舰船航线平行的直线。在测量过程中,拖曳体由舰船牵引,通过程序控制拖曳体的电机运转,实现拖曳体在预定测量剖面中的上浮和下潜。在电缆长度固定和船速稳定的情况下,可使拖曳体的运行轨迹保持平行直线状态。平行直线型CTD的特点是能够实现定深测量,但是测量结果不连续。正弦曲线型拖曳CTD是最早出现且使用最广的类型。拖曳体由舰船牵引,在设定的测量剖面中沉浮。通过程序控制拖曳体的电机运转,以改变拖曳体的升降姿态,理想情况下拖曳体的运行轨迹为正弦曲线,但在实际测量中的运行轨迹多为连续的多段直线。该类型拖曳CTD的特点是可实现连续测量,但是下潜深度较浅。垂直直线型拖曳CTD为加拿大BROOKE公司的专有类型。通过绞车控制拖曳体在测量剖面中的上浮和下潜。下潜时,降低船的航行速度,绞车完全释放,拖曳体在海水中做近似自由落体运动,其下沉速度可达6 m/s。上升时,在绞车牵引下将拖曳体快速拉出水面。该类型拖曳CTD的特点是可进行近似垂直的深海温盐剖面测量,但测量结果不对称,且对拖曳体结构和绞车控制性能要求较高。
拖曳式CTD测量系统的快速运动特性对传感器的响应时间提出了更高的要求,传统CTD剖面仪的传感器响应时间较长,难以达到拖曳式测量系统的要求,故将传统的CTD传感器简单地移植到拖曳体中是不合理的。其次,拖曳体的快速运动对传感器的测量特性也产生了较大影响。在快速运动过程中,海水的粘滞特性增强,导致了较大的温度测量误差;快速运动中的冲击动量使得电导率传感器的电极承受更大的冲击,容易引起极化阻抗的增加;升降过程中拖曳体的加速度和冲击动量影响了压力传感器的测量结果。因此,在数据处理过程中,应设法消除由于拖曳体的快速运动而产生的温盐深测量误差。
2.3 抛弃式温盐深剖面仪
抛弃式温盐深剖面仪(Expendable Conductivity-Temperature-Depth profiler,简称XCTD)是国外于20世纪80年代开始研制并快速发展的一种海水温盐剖面测量设备。它可以在下沉过程中测量海水的电导率和温度,并根据下沉时间和速度计算出深度,其最大测量深度可达2000m(Kizuetal,2008)。XCTD使用方便,性能可靠,可以舰船、潜艇和飞机为载体进行大批量投放,快速获取大面积海域内的温度和电导率数据,并据此计算出海水密度、盐度、声速等相关物理学参数。这些参数对于科学研究和国防建设等都具有极其重要的应用价值。特别是在军事应用中,温盐剖面资料对于潜艇的航行、通信、隐蔽、攻击以及水面舰艇的反潜行动都起着至关重要的作用(Crescentini et al,2011)。
XCTD测量系统主要由抛弃式探头、发射装置、数据接收装置和数据处理系统四部分组成。其中,抛弃式探头及发射装置结构如图3所示。
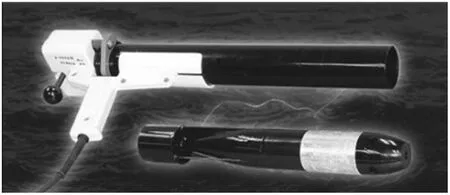
图3 XCTD探头及发射装置
抛弃式探头是测量系统的核心,其中搭载的温度和电导率传感器可在探头的下沉过程中测量海水的温盐度数据。微处理器用于完成传感器输出信号的采集、校正、转换,并将数据经通信接口电路实时传输至数据处理系统。需要说明的是,因为XCTD没有搭载压力传感器,故深度参数需要通过探头的下沉速度计算获得,下沉速度仅与探头的入水时间有关,根据入水时间可以得到探头任意时刻的下沉速度,积分后可以获得探头的深度(Chen et al,2015)。
发射装置不仅用于发射探头,还要作为水下探头和水上数据接收装置之间完成数据通信的辅助结构。在探头脱离发射装置时,探头和发射装置中的传输导线线轴同时释放高强度细导线,用于实现传感器测量结果的数据传输。
数据接收装置和数据处理软件的主要功能是接收水下探头传回的温度和电导率数据,并计算盐度、密度、声速等相应参数;检测探头入水信号,并根据入水时间和下沉速度计算剖面深度;对温度和电导率测量结果进行数据平滑和修正,实时记录并显示温度和电导率剖面数据随深度变化的特性曲线(贾志成等,2010)。
XCTD测量系统工作方式如图4所示:剖面探头由发射装置发射入水,入水后即开始测量海水的温度和电导率。在下沉过程中,测量数据经探头内的高强度细导线传输至水上数据接收装置,进行数据预处理。数据处理软件检测探头入水时间,计算其入水深度,并对对应深度上的温度和电导率数据进行平滑和修正处理,获得最终的温盐深剖面数据及温盐剖面曲线。

图4 XCTD工作方式示意图
空投式温盐剖面测量仪(Aerial Expendable Con-ductivity-Temperature-Depth profiler,简称AXCTD)的工作过程与XCTD相似。探头由飞机投掷,可一次性投掷多枚。探头从水面浮动单元开始下沉,在下沉过程中测量温度和电导率数据,测量结果通过探头内的高强度细导线传输至水面浮动单元,再由水面浮动单元以无线通信方式传输至飞机(Trampp,2012)。当探头下沉至最大深度时,细导线断裂,测量过程结束。
潜艇投弃式温盐深测量仪(Submarine Launched Expendable Conductivity-Temperature-Depth probes,简称SSXCTD)主要由发射装置、浮筒、探头、数据传输线和数据采集器等组成。其工作过程大致如下:浮筒由潜艇上的发射装置发射,并在浮力作用下浮出水面。当浮筒感应到空气时,释放其内部的温盐测量探头。探头在下沉过程中测量海水温盐数据,并将所测数据通过传输线实时传送至数据采集器。探头沉至海底时,数据传输线自动断开,测量过程结束。近年来,潜艇投弃式温盐深测量技术发展迅速,但仍存在许多关键技术亟待突破,例如:数据传输技术、信号处理技术、投放成功率及设备可靠性等(石新刚等,2015)。
2.4 海洋观测平台上的CTD传感器
海洋观测平台种类繁多,布放数量大、范围广,搭载于其上的CTD传感器也是重要的海洋温盐度数据来源。现有的海洋观测平台可分为定点观测平台和移动观测平台两大类。
海洋定点观测平台主要包括定点的浮标观测平台、潜标观测平台和海床基平台(李民等,2015)。海上定点观测平台融合了传感器技术、水下接驳技术、水声通信、数据传输、能源供应等多个技术领域,有效解决了能量供应和数据传输等问题。搭载于其上的温盐传感器可实现定点的海水温盐度变化规律的观测。
搭载于移动观测平台上的CTD传感器具有更强的机动性和持续性,可以进行长时间、大范围的温盐深剖面测量。Argo浮标、水下机器人和水下滑翔机等移动观测平台为海水温盐剖面资料的获取提供了更灵活高效的手段。
Argo浮标是国际Argo计划的任务承担者,它的设计寿命为3~5 a,最大测量深度为2 000 m,每隔10~14 d发送一组温盐剖面观测数据,每年可提供多达10万条温盐剖面资料。国际Argo计划科学组推荐使用的浮标主要有两种类型:美国Webb公司研制的APEX型浮标和法国Martec公司研制的PROVOR型浮标(Gould et al,2015)。
浮标专用CTD是Argo浮标的唯一测量传感器,为Argo浮标生产商所接受的生产厂家主要有美国的SeaBird和FSI两家公司(Oka et al,2004)。表3列举了APEX型浮标和PROVOR型浮标中CTD传感器的主要技术指标。
自主式水下机器人(Autonomous Underwater Vehicle,简称AUV)具有活动范围大、机动性能好、智能化程度高等优点,是进行海洋水文要素观测的重要工具(徐玉如等,2006)。
AUV搭载的CTD测量单元可以直接从AUV的电池中获取能量。相比于水下滑翔机,AUV具有更强的负载能力,因此可以携带更高等级的CTD传感器(Schmitt et al,2006)。例如,图5所示的Bluefin Robotics型AUV通常可搭载海鸟公司的SBE 49 Fast-CAT型CTD,其数据记录频率为16 Hz,深度可达到10 500 m(Paradis et al,2013)。
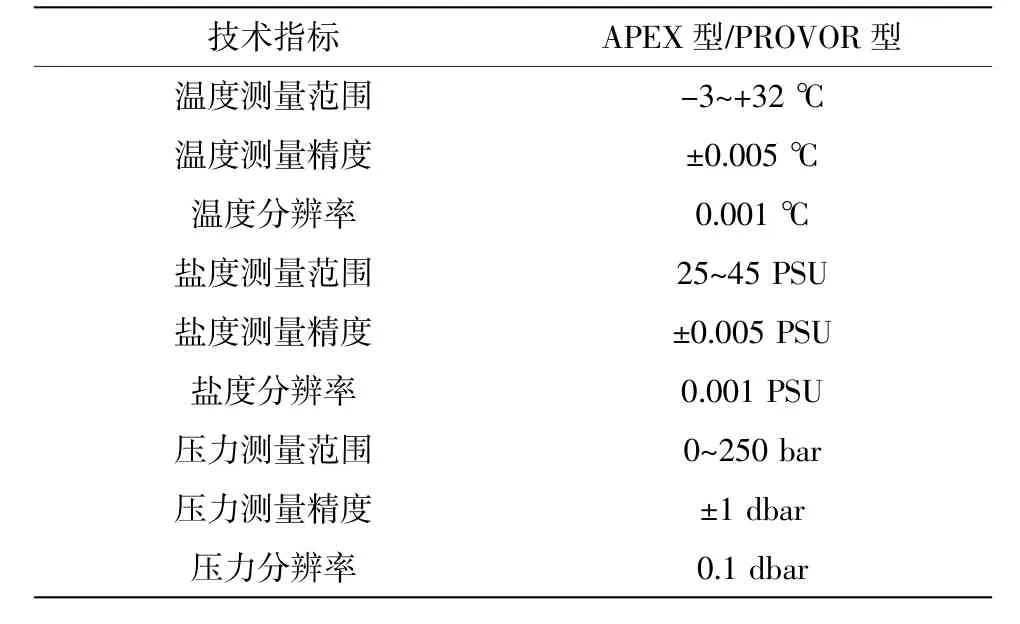
表3 两种Argo浮标CTD传感器技术指标

图5 Bluefin Robotics型AUV
水下滑翔机(Underwater Glider)是一种将浮标、潜标技术与水下机器人技术相结合的新型水下观测系统,最具代表性的产品为如图6所示的美国Slocum型水下滑翔机。与传统的海洋观测系统相比,水下滑翔机具有优越的机动性、可控性和实时性,可以安装温度、盐度、深度等各种传感器以收集海洋水文资料。将水下滑翔机用于海洋环境监测,有助于提高观测资料的时间和空间密度,满足了长时间、大范围海洋探索的需要(杨燕等,2015)。
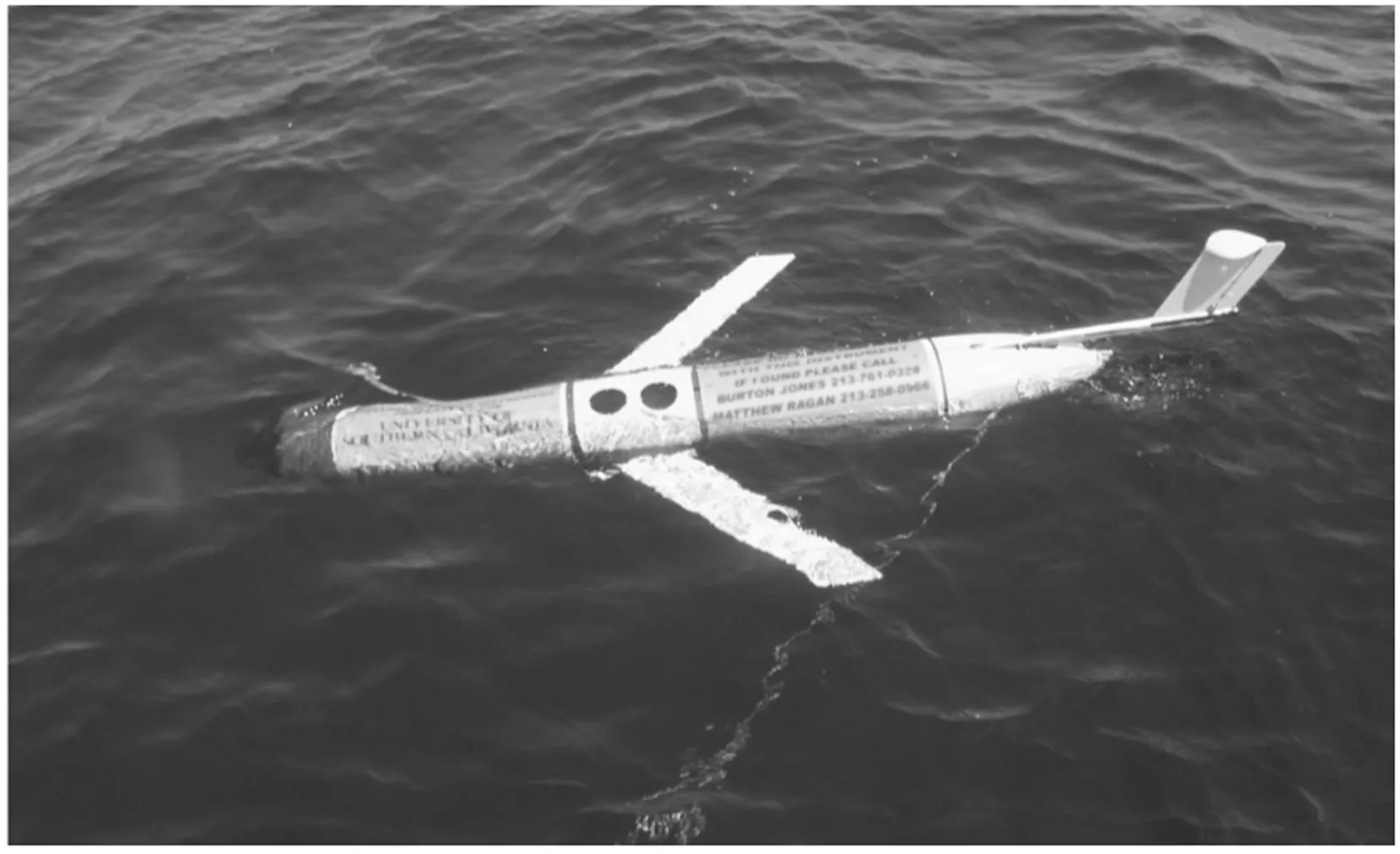
图6 美国Slocum型水下滑翔机
当前,水下滑翔机客户化订制的传感器涵盖了海洋动力学、海洋生态学、海水声光学特性等各个领域的传感设备,如CTD传感器、水听器、pH值传感器、溶解氧含量传感器、海水流速传感器等(Cecchi et al,2015)。图7所示的Slocum型水下滑翔机可搭载海水声学、光学、温盐深等多要素传感器。

图7 Slocum水下滑翔机的多要素传感器
对于水下滑翔机而言,因其负载能力较低,故不能够搭载高端的CTD产品。通常,水下滑翔机采用的CTD是由海鸟公司提供的专用CTD,其数据记录频率为1 Hz,深度可达1 500 m。因为水下滑翔机不能为CTD提供电源,故搭载在水下滑翔机上的CTD需要有独立的电源,并且能持续45 d以上的工作时间。
系缆式观测平台可搭载CTD观测设备,在驱动系统的牵引下,平台会沿着缆绳实现升降运动。在平台运动过程中,CTD可完成对海水温盐剖面的测量(李墨等,2008)。这种类型的CTD剖面观测设备会将测量结果记录在数据存储器中,待仪器回收后读取其存储的数据。图8所示为搭载有SEB 52-MP CTD传感器的McLane型系泊式剖面测量仪。
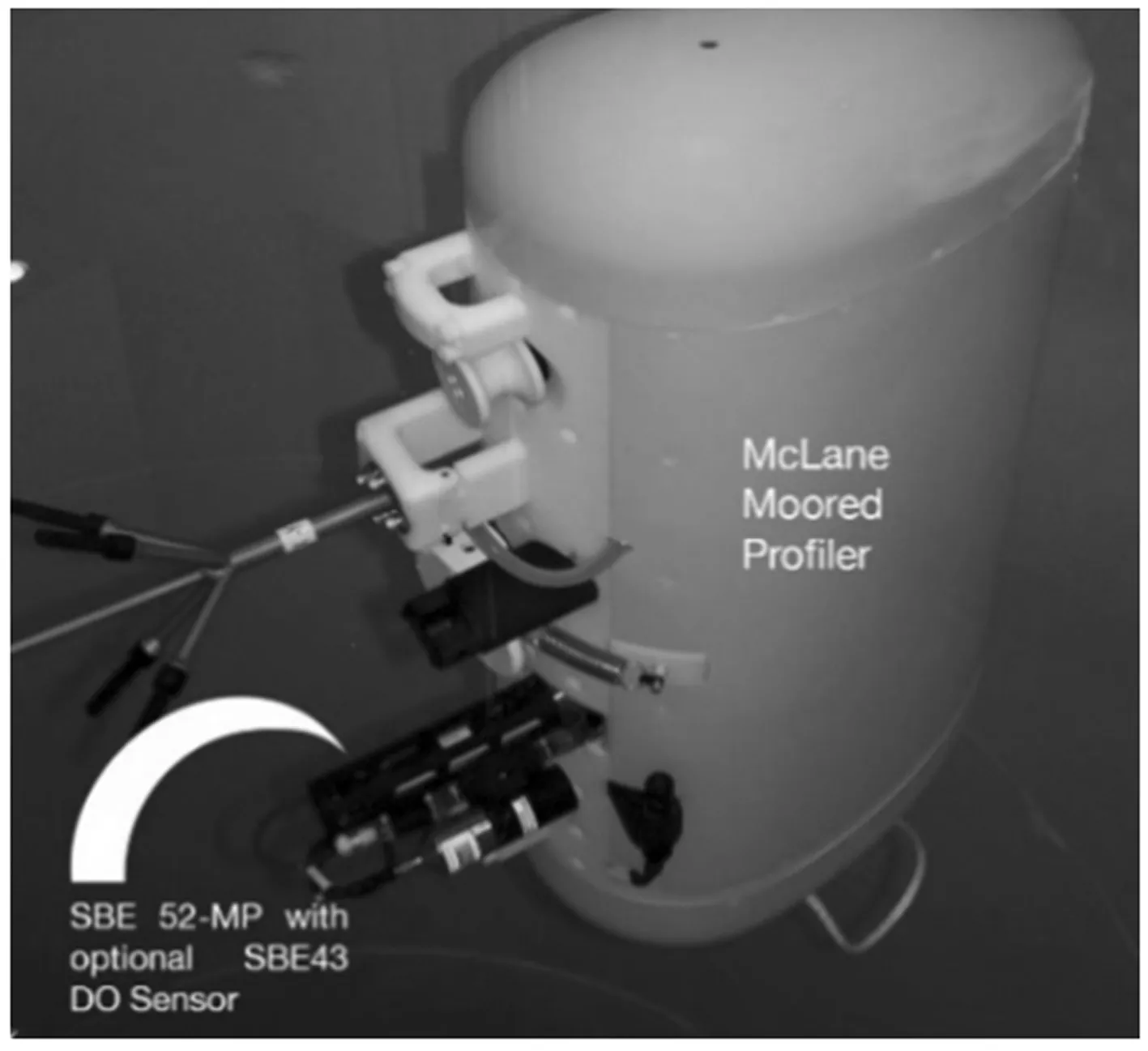
图8 搭载SEB 52-MP CTD的McLane型系泊式剖面测量仪
3 CTD标定与检测技术
CTD传感器在使用过程中因受到环境因素的影响及传感器自身的漂移,其测量结果的有效性和准确性会降低。为了保证仪器测量数据的准确可靠,必须定期对CTD进行校准。
世界各国的海洋研究机构都非常重视CTD的校准工作。美国的伍兹霍尔海洋研究所、斯克里普斯海洋研究所、海鸟海洋仪器公司以及加拿大的贝德福海洋研究所等都相继建立了CTD标定校准实验室。1996年海鸟公司的CTD校准实验室建造完成,其温度标准的测量准确度达到依0.000 5益,盐度标准的测量准确度为依0.002PSU,压力标准的测量准确度为依0.005豫FS,恒温海水槽控温精度为依0.0002益,温场均匀性为依0.000 1益。在CTD动态校准方面,美国华盛顿大学研制了具有不同温度和盐度参数的双层恒温海水槽,按照5 mm/s~3.1 m/s释放速度对海鸟CTD进行了动态校准;加拿大海洋研究机构研制了温度和电导率可变的海水槽,并对海鸟CTD、Mark III温度和电导率传感器的动态特性进行测试与分析(周欣,2012)。
我国温盐深传感器检测设备的研制开始于20世纪70年代。1986年研制成功了具有世界先进水平的CTD定标检测设备,并建立了CTD校准实验室。“九五”期间国家海洋技术中心研制的CTD校准设备,其温度标准的测量准确度为依0.000 5益,盐度标准的测量准确度为依0.002 PSU,压力标准的测量准确度达到依0.005豫FS。这些标准的建立使我国CTD剖面仪的量值能够溯源到国家或国际标准。
在校准设备研制的同时,CTD传感器的检定方法也在逐步完善。《JJG 763-2002温盐深测量仪检定规程》对检定设备的计量性能及检定方法做了细致描述(贾肇基等,2003)。表4列举了国内外CTD校准设备的基本技术指标。
4 CTD剖面测量技术发展趋势
CTD剖面测量技术已广泛应用于海洋环境监测中,并取得了显著效果。随着海洋观测技术的快速发展,CTD剖面测量技术也面临着新的机遇和挑战,其发展趋势可概括为以下几个方面:

表4 国内外CTD校准设备基本技术指标
(1)低功耗、模块化设计。低功耗的CTD传感器能够更好的与Argo浮标、水下滑翔机、深海观测平台等观测设备相融合,获得更长的观测寿命。同时,模块化设计有助于传感器的更换、维修和检定,便于传感器与观测平台的组装,使用更加方便。例如,海鸟公司的CTD传感器多采用模块化设计,能够快速准确的进行设备更换和组装。同时,海鸟公司的CTD测量单元中留有多种传感器接口,可根据测量需要搭载溶解氧、pH值等其他类型的传感器,进行多要素海洋观测。
(2)多参数立体化海洋观测网络。海洋立体观测网络是获取海洋环境信息的最有效手段,由海基、陆基、空基观测平台构成的立体观测网成为海洋温盐深剖面测量的多样化载体。除传统的船载CTD剖面测量设备外,定点和移动海洋观测平台都是进行温盐剖面观测的优良载体。基于水下接驳技术的海底观测网络可有效解决海床基等海底观测设备的数据传输和能量供应问题;低功耗传感器和高性能蓄电池的组合可有效增强无缆潜标等定点观测平台的工作时间和AUV等移动观测平台的续航能力;基于北斗卫星系统的通信技术也会为剖面浮标等观测设备提供新的通信手段。
(3)优化传感器测量性能。对于某些特殊的应用需求,如研究短时间内海洋剖面的变化规律和快速运动状态下的温盐深测量,现有的CTD剖面测量设备难以满足其时间和空间的分辨率要求。故CTD高速采集测量技术和高频响应测量技术亟待发展,提高传感器数据采集频率和响应速度将成为研究的重点。目前,国内的CTD测量设备在测量精度方面并不逊于国外产品,只是在长期稳定性方面尚与国外产品存在差距,故提高设备的长期稳定性将是CTD测量设备的重要发展方向。
(4)加快发展防生物附着技术。部分海洋生物会附着在水下观测设备及舰船等海洋结构物表面并对其产生不良影响。对于CTD而言,海洋生物的附着会降低其测量精度及长期稳定性。目前的防生物附着方法主要有物理防污法、化学防污法和生物防污法,但这些防污方法本身都存在一定的局限性,其防污效果难以满足海洋监测和开发的需要。因此现有的防污技术正朝着经济、高效、环保的方向发展。其中,微生物粘膜防污技术、表面植绒型防污技术、纳米防污技术等将是该领域的研究重点(胥震等,2012)。
(5)研发深海型温盐深测量设备。深远海发展战略已成为各海洋强国关注的焦点,研发深海型温盐深测量设备已成为海洋监测领域的必然发展趋势。国际Argo计划组已经将深海型Argo浮标作为其计划发展的关键一步,并自2012年起开始了相关研究(Riser et al,2016)。随着深海监测技术发展步伐的加快,适用于极端海洋环境下的高精度温盐深传感器将成为未来的重点发展方向。随之而来的深海观测平台布放与回收技术、深海观测设备能源供应技术以及深海观测数据实时传输技术都将成为亟待突破的技术难点。
5 结语
目前,我国的CTD剖面测量技术虽已接近世界先进水平,但在部分领域仍处于技术跟踪阶段。随着我国经济和军事的发展脚步逐渐迈向深蓝,对更广阔海域进行环境监测的需求将更为迫切,故需要不断增强自主创新能力,大力研发具有自主知识产权的CTD剖面测量设备。同时,应注重卫星遥感、观测平台、水声探测、传感技术、通信技术的同步发展,从而构建连续性、自动化、实时性、多平台、多要素、高精度的海洋立体观测网络。
Cecchi D,Garau B,Camossi E,2015.Sensor-driven glider data process-ing.Oceans,IEEE:1-9.
Chen G,Libin D U,Haijing H E,et al,2015.Research on key techniques of expendable conductivity temperature depth measuring system.Instrumentation,2:18-27.
Crescentini M,Bennati M,Tartagni M,2011.Integrated and autonomous conductivity-temperature-depth sensors for environmental monitor-ing.International Midwest Symposium on Circuits&Systems,IEEE:1-4.
Fan H,Peng A,Qi M,2010.Research on expendable seawater conduc-tivity measurement system.International Conference on Signal Pro-cessing Systems,1:115-118.
Gong W,Mowlem M,Kraft M,2008.Oceanographic Sensor for in-situ temperature and conductivity monitoring.Ocean,IEEE:1-6.
Gould J,Roemmich D,Wijffels S,2015.Argo profiling floats bring new era of in situ ocean observations.Eos Transactions American Geo-physical Union,85(19):185-191.
Kizu S,Onishi H,Suga T,2008.Evaluation of the fall rates of the present and developmental XCTDs.Deep Sea Research Part I Oceano-graphic Research Papers,55(4):571-586.
Oka E,Ando K,2004.Stability of Temperature and Conductivity Sensors of Argo Profiling Floats.Journal of Oceanography,60(2):253-258.
Paradis R,Wood S L,2013.Inexpensive Expendable Conductivity Tem-perature and Depth(CTD)Sensor.Oceans,IEEE:1-12.
Petitt R A,Schmitt R W,Brown N,2005.A new conductivity-tempera-ture-depth device for high resolution oceanographic measurements.Oceans,2:1070-1074.
Riser S C,Freeland H J,Roemmich D,et al,2016.Fifteen years of ocean observations with the global Argo array.Nature Climate Change,6(2):145-153.
Rudnick D L,Klinke J,2007.The Underway Conductivity Temperature Depth Instrument.Journal of Atmospheric&Oceanic Technology,24(11):1910-1923.
Schmitt R W,Petitt R A,2006.A fast response,stable CTD for gliders and AUVs.Oceans,IEEE:1-5.
Trampp D A,2012.Upper Ocean Characteristics in the Tropical Indian Ocean from AXBT and AXCTD Measurements.Thesis Collection.
郭斌斌,李琦,肖波,2015.SBE 917plus CTD剖面仪及其自容式作业.海洋信息,1:42-45.
贾肇基,李明钊,2003.JJG763-2002.温盐深测量仪检定规程.国家海洋计量站.
贾志成,于晓山,尼建军,等,2010.XCTD剖面仪数据传输电路的设计与实现.海洋技术学报,29(2):1-4.
兰卉,2012.七电极电导率传感器及CTD测量系统技术研究,天津大学.
李民,刘世萱,王波,等,2015.海洋环境定点平台观测技术概述及发展态势分析.海洋技术学报,34(3):36-42.
李墨,李永军,2008.系缆式剖面测量平台的试验及分析.海洋技术学报,27(2):1-4.
牛付震,2009.温盐深传感器测量技术的研究与设计,哈尔滨工程大学.
潘乐乐,2015.在线CTD仪器的设计与研究,浙江大学.
任炜,李晖,李永奇,等,2008.UCTD系统及其关键技术介绍.海洋技术学报,27(1):8-10.
石新刚,苏强,2015.投弃式海洋仪器设备发展现状.声学与电子工程,4:46-48.
胥震,欧阳清,易定和,2012.海洋污损生物防除方法概述及发展趋势.腐蚀科学与防护技术,24(3):192-198.
徐玉如,庞永杰,甘永,等,2006.智能水下机器人技术展望.智能系统学报,1(1):9-16.
杨燕,孙秀军,王延辉,2015.浅海型水下滑翔机技术研究现状分析.海洋技术学报,4:7-14.
张兆英,2003.海水电导率、温度和深度测量技术探讨.仪器仪表学报,24(z2):38-41.
张兆英,王抗美,2004.拖曳式CTD测量技术研究.海洋技术学报,23(4):18-21.
张兆英,王云泉,吴明钰,等,2002.高精度CTD剖面仪应用研究.海洋技术学报,21(2):1-7.
周欣,2012.CTD校准技术研究.青岛科技大学.
Review of measurement techniques for temperature,salinity and depth profile of sea water
ZHANG Long,YE Song,ZHOU Shu-dao,LIU Feng,HAN Yue-qi
(Collegeof Meteorology and Oceanography,National University of Defense Technology,Nanjing 211101,China)
Temperature,salinity and depth are important parameters of the ocean physical properties as well as the basic elements of the ocean hydrological observation.Conductivity-temperature-depth(CTD)profiler is the main instrument for the observation of temperature and salinity profile which can measure the conductivity,temperature and depth parameters accurately,and calculate the other parameters of sea water,such as salinity,density and acoustic velocity.These data are crucial for the development of marine economy,marine national defense construction and the protection of the marine environment.The basic principle and development status of CTD measurement technology were reviewed in this paper.The typical CTD measuring instruments and CTD sensors installed on the ocean observation platforms were introduced.The calibration and testing technology of CTD sensors were discussed.Furthermore,the development trend were summarized.
temperature measurement;salinity measurement;depth measurement;CTD profiler;sensor technology;development trend
P716
A
1001原6932(圆园17)05原园481原09
10.11840/j.issn.1001-6392.2017.05.001
2016-06-22;
2016-10-19
国家自然科学基金(40976062);江苏省自然科学基金(BK2009062);国家自然科学基金青年基金(41406107)
张龙(1992-),硕士研究生,研究方向:海洋仪器及测试技术。电子邮箱:zhanglonglxy@163.com。
叶松,博士,副教授。电子邮箱:yesong999@hotmail.com。
(本文编辑:袁泽轶)
猜你喜欢
中国科技纵横(2022年17期)2022-10-25
纺织科学研究(2020年1期)2020-02-25
军事文摘(2018年24期)2018-12-26
浙江工业大学学报(2017年5期)2018-01-22
现代园艺(2017年23期)2018-01-18
中国化妆品(2017年12期)2017-06-27
北京航空航天大学学报(2016年6期)2016-11-16
太空探索(2016年7期)2016-07-10
中国塑料(2016年11期)2016-04-16
船舶标准化工程师(2015年5期)2015-12-03
