
基于航姿参考系统和云台的视频监控跟踪系统设计∗
2017-10-23 07:40:31谢晓方李德栋
舰船电子工程 2017年9期
杨 健 谢晓方 李德栋
(海军航空工程学院 烟台 264001)
基于航姿参考系统和云台的视频监控跟踪系统设计∗
杨 健 谢晓方 李德栋
(海军航空工程学院 烟台 264001)
采用基于航姿参考系统和云台相结合的方法,设计了视频监控跟踪系统,给出了系统的总体结构和软件设计,实现了串口通讯和头部姿态跟踪等关键技术并给出了关键部分的代码。
AHRS;云台;视频监控;姿态跟踪
C lassNum ber TP391.9
1 引言
随着惯性敏感器件越来越向小型化、高精度、低成本发展,航姿参考系统(AHRS)越来越广泛地应用于虚拟现实、摄像和云台、室内定位等需要三维测量的产品中[1]。本文就是采用了航姿参考系统用于测量用户头部姿态,根据姿态数据变化来控制云台运动,实现了视频监控跟踪系统的设计。
2 航姿参考系统(AHRS)和云台
2.1 航姿参考系统
航姿参考系统(Attitude and Heading Reference System,AHRS)是一种在动静态环境下对载体的横滚角、俯仰角和方位角进行高精度测量的设备[2]。
系统工作原理如图1所示:AHRS由加速度计、磁力计和陀螺仪构成,它测量的数据主要是地球的重力场和磁场,因此它的静态精度取决于对磁场和重力的测量精度,而陀螺仪则决定了它的动态性能。通过内置的惯性传感器测得相应数据,利用加速度计校正初始姿态,并结合陀螺仪对俯仰角和滚动角进行姿态补偿和漂移的修正,最后使用卡尔曼滤波器对多传感器数据进行融合,解算出运动载体姿态。
2.2 云台
云台,即PTZ,是Pan/Tilt/Zoom的简写,即左右上下转动和可变焦的摄像机,分为固定和电动云台两种[3]。固定云台适用于监视范围不大的情况,本文的工作是为后继航空全景显示系统进行预先研究,因此采用可以进行大范围扫描监视的电动云台,在这里我们选取了海康威视9168云台。
海康9168云台采用以太网连接控制,支持多种网络协议。云台在水平方向360°连续旋转,垂直方向-90°(向下)~40°(上仰),支持多种格式视频压缩解码,并且提供了设备SDK,方便开发利用其提供的各类接口实现各项功能。
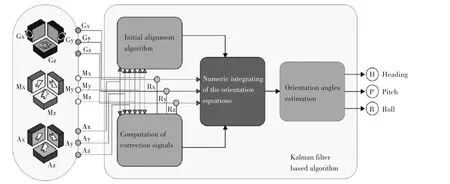
图1 航姿参考系统工作原理图
3 系统总体结构
3.1 总体框架
本系统采用海康威视9168云台,图像数据和云台控制命令都通过网线传输,系统总体结构如图2所示。

图2 系统总体结构
系统由三部分组成:主控计算机、航姿参考系统和云台。其中航姿参考系统通过串口向主控计算机传送姿态数据以确定用户位置,即视线关注点;云台通过网线与主控计算机交互信息,接收主控计算机的姿态控制指令旋转和俯仰,总体结构如图3所示。
3.2 软件结构
系统软件总体流程图如图3所示。
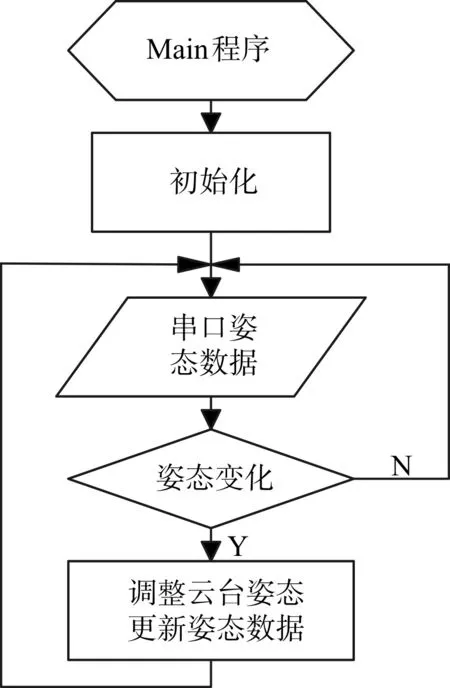
图3 视频监控跟踪系统程序流程图
视频跟踪系统完成云台自检,AHRS标校等初始化工作后,进入主循环通过检测串口接收的姿态数据,利用姿态检测算法检测姿态变化,若超过程序设定的阈值则认为姿态发生变化,相应地控制云台旋转或俯仰以跟踪用户视线变化;若姿态仍在阈值内,则认为姿态没有变化,继续在主循环检测串口姿态数据变化。
其中控制云台调整姿态要使用云台控制操作接口函数:
BOOLNET_DVR_PTZControl(
LONG lRealHandle,//NET_DVR_RealPlay 或NET_DVR_RealPlay_V30的返回值
DWORD dwPTZCommand,
//云台控制命令
DWORD dwStop,
//云台停止动作或开始动作:0-开始;1-停止
);
返回值:TRUE或者FALSE,分别代表成功和失败。
参数dwPTZControl的宏定义如表1所示。
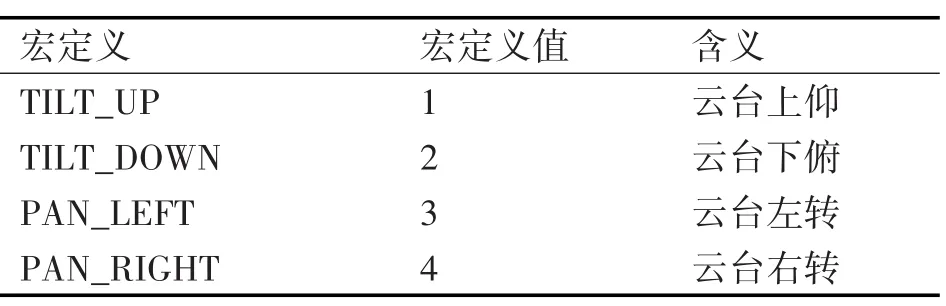
表1 云台控制参数宏定义
每次对云台姿态进行调整都要调用该接口函数两次,即接口函数中的dwStop,dwStop为0时代表云台停止转动,为1时开始转动。图像预览要在调用此接口前开启。对云台的操作命令是由控制码决定的,控制码由解码器进行解码,如果不能匹配则需要重新设置解码器,在默认情况下,云台以最大速度转动,其转动速度也可通过调用相关接口进行调整。
4 关键技术
4.1 基于AHRS的头部姿态跟踪
航姿参考系统(AHRS)原本起源于飞行器相关技术,但是近年来随着惯性器件越来越小型化、高精度、低成本等优点,AHRS开始广泛应用于虚拟现实、摄像和天线云台、工业设备、室内定位等领域。本视频跟踪系统中采用AHRS可以实现对头部姿态较好的跟踪效果。
主要流程为:当串口有数据时触发串口中断,然后从数据缓冲区中每次读出一个字节的数据,缓冲区为空的时候停止。然后按照数据包格式判断数据头及CRC校验,若CRC校验正确则把姿态数据字段按内存拷贝方式填充到sAHRSData结构体中,这样sAHRSData结构体中就是最新一包的姿态数据了,sAHRSData结构定义如下:
Typedef struct
{
unsigned char Flags; //状态位
float Euler[3]; //3个欧拉角
floatGyro[3]; //经校准后的角速度值
floatAcc[3]; //校准后的加速度值
floatMag[3]; //校准后的指南针值
}sAHRSData;
从AHRS接收的姿态数据格式为无符号四字节数据,因此需要转换为浮点数才可以使用,这里我们采用的是联合体方式,转换程序如下所示:
typedefunion_fconvert
{
unsigned charu8_val[4];
float float_val;
}fConvert;
float Buffer_To_Float(unsigned char Buffer[])
{
fConvertdata;
for(i=0;i<4;i++)
data.u8_val[i]=Buffer[i];
return data.float_val;
}
4.2 串口通讯
本视频跟踪系统中需要将AHRS的姿态数据传送给云台设备来控制云台摄像头旋转,而数据传送就是通过串口来进行,在VC中也就是在串口事件处理函数 oncommunication()中进行[4]。每当串口缓冲区中有一个或一个以上字符时触发串口通讯事件,该事件就驱动(调用)串口事件通讯处理函数oncommunication(),然后就可以对从AHRS接收到的姿态数据进行处理,提取需要的数据。
具体程序如下:
void CSCommTestDlg::OnComm()
{
VARIANT variant_inp;
COleSafeArray safearray_inp;
LONG len,k;
BYTE rxdata[2048];//设置BYTE数组
CString strtemp;
if(m_ctrlComm.GetCommEvent()==2)
//事件值为2表示接收缓冲区内有字符
{
variant_inp=m_ctrlComm.GetInput();//读缓冲区
safearray_inp=variant_inp;//VARIANT型变量转换为ColeSafeArray型变量
len=safearray_inp.GetOneDimSize();//得到有效数据长度
for(k=0;k<len;k++)
safearray_inp.GetElement(&k,rxdata+k);//转 换 为BYTE型数组
for(k=0;k<len;k++)//将数组转换为Cstring型变量{
BYTE bt=*(char*)(rxdata+k);//字符型
strtemp.Format(“%c”,bt);//将字符送入临时变量strtemp存放
m_strRXData+=strtemp;//对应字符串放入接收编辑框
}
}
UpdateData(FALSE);//更新编辑框内容}
5 结语
本文实现了一种基于航姿参考系统和云台的视频监控跟踪系统的设计,可以比较精确地定位头部姿态并控制云台运动以跟踪用户视线,为后继的航空全景显示系统的研究奠定了基础。
[1]苏中,李擎.惯性技术[M].北京:国防工业出版社,2010:29-36.
[2]薛婷,黄剑,曲立群,等.基于平面靶的多气泡虚拟三维测量系统标定[J].天津大学学报,2014,47(5):441-445.
[3]管凤旭,杜俊琪,赵拓,等.基于WiFi的远程目标跟踪系统设计[J].传感器与微系统,2017,36(3):101-103.
[4]曾辉艳,鄢萍,贺晓辉,等.可配置的智能监控软件开发方法[J].计算机工程,2010,36(10):239-241.
[5]王家乐,关越,邓哲,等.基于MEMS传感器的运输环境检测仪的研制[J].测控技术,2017,36(2):107-110.
[6]杜衫杉,吴昊等.一种面向AHRS的改进互补滤波融合算法[J].国外电子测量技术,2015,34(3):13-18
[7]李翔,李明.航姿参考系统算法性能优化仿真研究[J].计算机仿真,2017,34(2):60-64.
[8]闻泽阳,许江宁,于梦琦.基于MEMS IMU的室内导航系统设计[J].舰船电子工程,2016,36,12:75-79.
[9]贾云飞,陈扬等.虚拟3D技术中摄像机云台姿态高精度定位测试方法研究[J].测试技术学报,2016,30(3):208-214.
[10]陈淑兰,王建勇,孟卿卿,等.城市监控联网平台视频播放器[J].计算机系统应用,2017,26(3):108-113.
[11]李康,周泩朴,邹林波,等.基于无人机的大场景序列图像自动采集和三维建模[J].西北大学学报,2017,47(1):30-37.
[12]王臻,任海燕等.基于串口通讯的角位移传感器校验设备的研制[J].自动化技术与应用,2016,35(5):75-79.
Design of Video Surveillance and Tracking System Based on Attitude and Heading Reference System and PTZ cam era
YANG Jian XIE Xiaofang LIDedong
(Naval Aeronautical Engineering Institute,Yantai 264001)
Based on the AHRS(Attitude and Heading Reference System)and PTZ(Pan/Tilt/Zoom)camera,a videomonitoring and tracking system is designed.The overall structure of the system and the software design are given.The key technologies such as serialportcommunication and head attitude tracking are introduced,and the codesof the key partare given.
AHRS,PTZ camera,videomonitoring,attitude tracking
TP391.9
10.3969/j.issn.1672-9730.2017.09.016
2017年3月7日,
2017年4月25日
杨健,男,博士研究生,工程师,研究方向:军用仿真技术,计算机视觉。
猜你喜欢
现代装饰(2022年6期)2022-12-17 01:10:30
现代装饰(2022年6期)2022-12-17 01:09:42
装备制造技术(2020年11期)2021-01-26 00:39:12
摄影之友(影像视觉)(2020年2期)2021-01-14 05:34:28
学生天地(2020年3期)2020-08-25 09:04:16
电子制作(2019年23期)2019-02-23 13:21:16
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
通信电源技术(2016年5期)2016-03-22 01:10:02
地矿测绘(2015年3期)2015-12-22 06:27:26
