
卡尔曼滤波在大功率伺服驱动器中的应用
2017-10-21 12:11程高
科技风 2017年12期
关键词:单片机
摘要:本文介绍了基于XC167单片机及FPGA的20Kw伺服控制系统的设计方案;将卡尔曼滤波(EKF)技术应用于交流伺服系统的低速控制,完成系统低速下电机转速的估计;在硬件平台上使用C语言完成伺服控制系统的软件编写,完成控制系统的设计。
关键词:交流伺服;EKF;单片机;功率模块
交流伺服系统的性能主要取决于系统的低速控制性能,所以,提高伺服系统性能的关键在于提高低速控制性能。本文在分析了伺服驱动器硬件设计的基础上,重点研究了卡尔曼滤波器和位置传感器相结合的方法来进行伺服系统的低速的控制,并进行了软件设计,给出了试验波形。
1 伺服驱动器的硬件设计
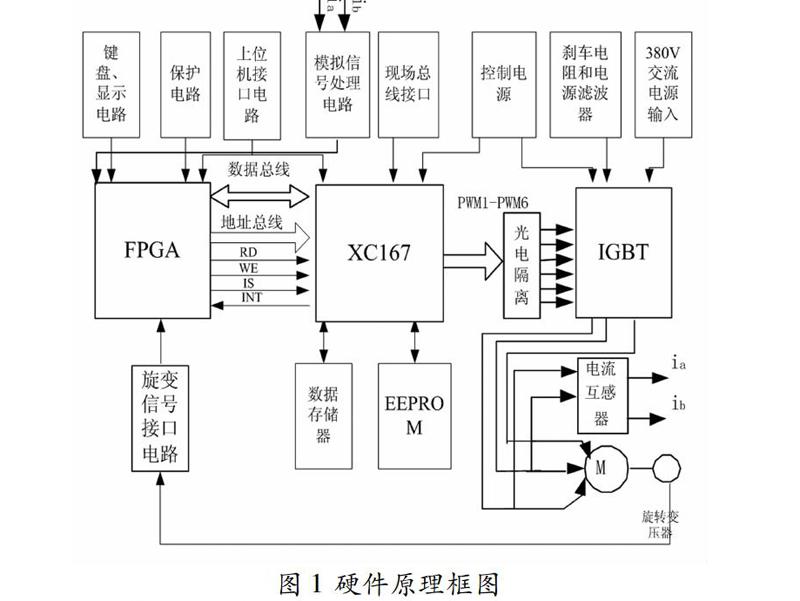
本文设计的20Kw伺服驱动器硬件系统主要由主控单元和功率驱动单元,结构框图如图1所示。包括保护电路及CAN总线接口、单片机加FPGA基本系统系统几大部分。
1.1 单片机主控电路
单片机主电路是指能使单片机内核正常运行、以及能对单片机进行调试的最简硬件设计。包括XC167单片机、晶振、锁相环、片外的数据存储器、片外的程序存储器、片外扩展的具有SPI接口的EEPROM等电路。单片机使用英飞凌公司单片机芯片XC167,单片机XC167外接晶振、复位电路、JTAG(即:仿真器)接口电路等基本电路之外,为满足驱动器功能要求,单片机内部还配置了64K×16Bit的高速静态存储器,外部配置了128K×8Bit的非易失性存储器(EEPROM)。由于EEPROM具有非易失性的特点,即使掉电也不会丢失数据,因此用其保存程序运行过程中的重要参数。需要说明的是,除片外数据存储器外,输入输出单片机的I/O口的信号都要经过一级驱动,用以提高信号传输的可靠性。
1.2 IGBT模块电路设计
本驱动器选输出功率为20kW,母线电压按540V计算,通过功率驱动模块的电流为70A,根据转换效率并进行降额设计,选用300A的功率模块。本伺服驱动器选用英飞凌公司生产的高度集成化的IGBT晶体管FF300R12ME4作为功率输出器件,该模块采用绝缘基板工艺,内置优化后的栅级驱动和保护电路,具有输入阻抗高、开关频率高、所需驱动功率低、热稳定性好和安全工作区大等优点,具有集成化的功率输出电路,可直接连接负载,集成内置栅极驱动电路和保护电路(短路保护、过温保护、驱动电压欠压保护),额定工作电流300A,最大工作电流达600A,工作温度范围40℃~+85℃,适用最大电压为1200V。
2 卡尔曼滤波算法设计
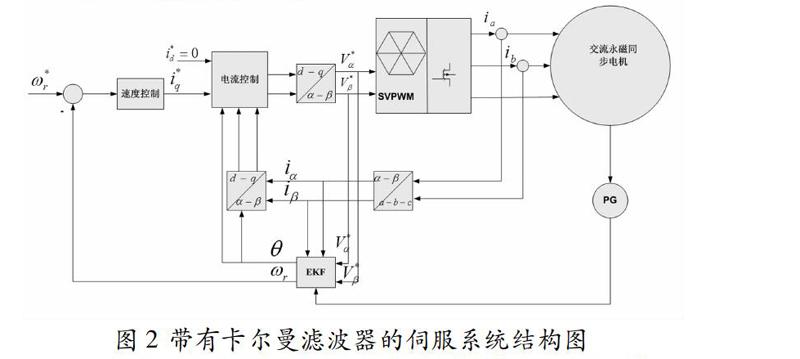
基于卡尔曼滤波器的伺服系统和位置传感器的伺服系统在结构很相似,但区别是在转子位置角和转子速度的获取,基于卡尔曼滤波器的伺服系统结构如图2所示。
3 設计结果与分析
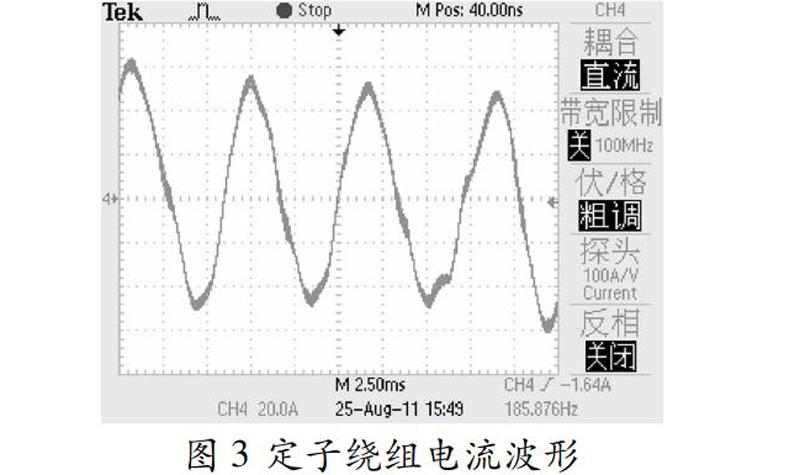
下面为以永磁同步电机为控制对象的实验结果,电机参数如下:额定转矩为74NM,额定转速为1500r/min,额定功率为11.623KW。图3为额定转速为1500r/min,负载转矩为74NM时的一相定子绕组的电流波形图。电流波形顯示正弦性较好,此时电机运行平稳,机械噪声较小,电机在低速下(5rpm)运行平稳,没有振动、爬行的现象。
试验结果表明,电机高速时,EKF算法的对系统影响不大,但电机低速情况下,基于EKF算法明显改善了电机运行的各项性能指标,电机运行平稳,爬行现象消失。
4 结语
本文设计了基于XC167单片机及FPGA的20Kw伺服控制系统的设计方案,由FPGA完成保护电路的快速锁存,其它由DSP完成模拟信号和串行总线的处理等,其中DSP完成三环(位置环、电流环、速度环)控制。通过卡尔曼滤波器估算电流反馈和速度反馈,试验结果表明该方法可以明显改善电机的低速性能。
参考文献:
[1]杨益群,曹锋.基于SPI高精度数据采集器.江苏技术师范学院,2002(12):711.
[2]闰湛,虞鹤杠.基于DSP+FPGA的断路器同步关合控制平台的研制.北京:计算机测量与控制,2006.
[3]苗中华.基于滑模变结构控制的液压伺服系统超低速轨迹跟踪.上海交通大学学报,2008(7):11821186.
[4]孟凡军,徐国柱.基于状态观测器的扰动补偿在转台控制中的应用[J].中国惯性技术学报,2009,17(4):331335.
作者简介:程高(1985),男,本科,助理工程师。
猜你喜欢
计算机应用文摘·触控(2022年8期)2022-05-25
锦绣·中旬刊(2019年8期)2019-09-10
科学与财富(2019年21期)2019-08-06
中国机械(2014年23期)2014-10-21
科技致富向导(2013年10期)2013-06-04
现代电子技术(2009年14期)2009-09-05
电子世界(2004年4期)2004-07-26
电子世界(2004年4期)2004-07-26
电子世界(2004年4期)2004-07-26
电子世界(2004年5期)2004-07-26
