空间目标匹配在“天地图·福建”道路数据融合中的应用
2017-10-16 03:30:48张寿选
地理信息世界 2017年5期
张寿选
(福建省基础地理信息中心,福建 福州 350003)
0 引 言
国家测绘地理信息局2013年启动国家、省、市节点同构试点,旨在通过节点间的基础设施与服务平台软件同构与数据融合,实现更深层次分布式信息资源集成与协同服务,为未来基于云架构的分布式服务资源动态调度奠定基础。数据融合的目标是按照现势性优、精度高、数据全的原则,形成通用性强、精度优、覆盖广的“天地图·福建”的数据源,解决国家、省、市、县的数据模型、现势性、精度等不一致的问题,保证数据的权威性。矢量数据融合对象包括水系、交通、居民地、境界、绿地以及地名、地址与兴趣点等。
福建省2013年参加国家主节点数据与省级节点数据融合试点,之后每年均开展1次数据融合工作,融合成果除提交国家局外,还作为“天地图·福建”的主要数据源。境界、水系、绿地、居民地等数据主要采用省级中比例尺和市县大比例尺的数据,融合的主要工作是数据替换和协调,处理工作量相对较小。道路数据融合时,需要对国家、省、市、县的数据进行融合,同时参考专业部门提供的专题数据,多源数据的数据模型不同,除几何类型和图形差异外,还存在属性不一致问题,人工处理耗时费力。为提高数据融合的效率,急需能够快速、准确的对多源、多尺度的道路数据进行变化发现的工具。
1 空间目标匹配方法及应用
1.1 道路数据融合方法
在引入空间目标匹配之前,多源道路数据变化要素提取主要使用缓冲区和擦除等空间分析工具完成。主要技术流程如图1所示。
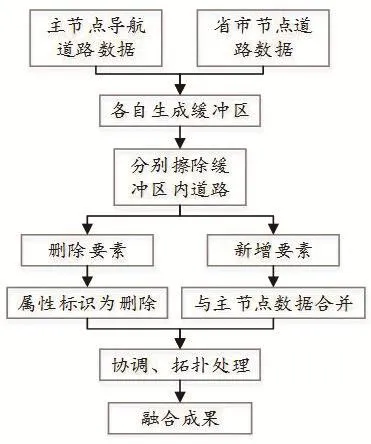
图1 道路数据融合流程Fig.1 Flow chart of road data fusion
省市节点道路数据的现势性优于国家主节点道路数据的现势性。国家主节点导航道路数据、省市节点道路数据分别生成缓冲区,然后使用主节点缓冲区擦除省市节点道路数据,剩余道路为省市节点相较于主节点的增量道路,将增量道路数据与国家主节点数据进行合并。与此类似,利用省市节点道路缓冲区擦除国家主节点道路数据,剩余的道路为删除道路,将主节点道路的属性字段STACOD标识为3(删除)。最终进行属性处理、要素间关系协调、拓扑检查等,形成道路数据融合成果。
这种融合方法存在一个难以解决的问题是:几何图形没有变化但属性变化的要素需要人工判断,而属性变化发现比较困难,需要逐要素、逐字段的人工判断,耗时费力。
1.2 空间目标匹配方法
目标匹配已广泛应用于生活中,如医学影像分析、遥感影像识别、指纹识别、人脸识别等。近年来,随着天地图、数字城市、各级基础地理信息数据库等项目的开展和建成,空间数据如何快速更新、多尺度联动更新成为地理信息行业面临的重要问题[1-2]。有较多学者对空间目标匹配进行了研究,针对不同几何类型的地物提出了提高匹配精度和效率的算法[3]。空间目标匹配技术已广泛应用于地图融合及合并、地图数据库更新、空间数据库集成与共享、不同地图数据库质量评价等[4]。
1.3 距离匹配算法
线状地物的匹配最常用的算法有Hausdorff距离和Fréchet距离等,但这些方法都有一定局限性,如Hausdorff距离容易受空间目标局部几何形状的影响[5]。由于道路数据融合时数据量较大,如国家主节点的道路数据约有120万条,福建省1:10 000DLG数据中道路约127万条,空间目标匹配涉及较多的缓冲区计算、空间查询、距离计算等,必须考虑匹配效率和准确率。
来源于不同数据的两条道路是否表示的是同一条道路,只需要确定两条道路的距离是否足够接近即可[6]。道路匹配的基本思路:两条道路L1和L2,矢量道路数据其实是坐标点序列,因此可以将道路匹配简化为离散的点集与折线的距离问题,即道路L1的节点离散成序列点集S(p1,p2,…,pn),计算点集S中每个点到折线L2的最短距离dmin,得到最短距离集合D(d1,d2,…,dn),如果max(d1,d2,…,dn)小于最大距离阈值tmax,且最短距离的平均值∑1ndi/n小于设定的平均最小距离阈值tavg,就认为L1与L2匹配,如图2所示,图中L1有p1-p44个结点,到L2的最短距离对应点分别为t1-t4,最短距离分别为d1-d4。利用这种思路,可以将道路匹配问题简化为距离计算,提高计算的效率。

图2 最短距离匹配Fig.2 Minimum distance matching
道路折线之间的匹配关系有多种(如图3所示):①1:0,一条线对0条线,包括0条线对一条线;②1:1,一条线对一条线;③1:n,一条线对多条线,包括多条线对一条线;④m:n,多条线对多条线。其中,1:0和0:1为新增和删除要素。1:1和1:n的匹配相对比较简单,匹配的精度很高。m:n的情况最为复杂,也是匹配计算最为耗时的一种。在匹配时,可以将m:n的情况根据最短距离计算结果打断成m′段,再取m′中的一段与n进行匹配,从而将m:n转换成1:n的情况,再遍历m′实现m:n的匹配。
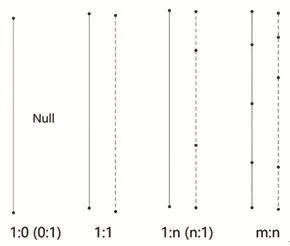
图3 折线间匹配关系Fig.3 Diあerent matching situations of polygonal lines
在进行道路匹配时,需要计算每条道路的缓冲区,使用缓冲区进行空间相交查询,查询结果一般有多条,特别是路网密集的城区,为提高匹配的效率,可以生成道路折线凸包,并利用凸包计算出道路折线的角度,当两条道路的角度差小于某个阈值时才进行后续的匹配计算,这样能够排除大部分空间查询结果,减少匹配的计算量。
2 空间目标匹配算法实现
2.1 总体设计
道路空间匹配的流程如图4所示。更新道路为可作为更新参考资料的外部道路数据,原始道路为“天地图·福建”的现势数据,更新道路的现势性优于原始道路的现势性,空间目标匹配的过程就是为了从更新道路中提取几何图形和属性变化的道路。
更新道路和原始道路作为数据输入,首先使用更新道路中的道路折线Li生成缓冲区,利用缓冲区对原始道路进行空间相交查询,查询结果为F(f1,f2,…,fn),如果空间查询结果F为空,则Li为新增道路,如果是原始道路对更新道路的空间查询结果为空,则为删除道路。
如果空间查询结果F不为空,则进行后面距离匹配的计算,Li如果能够与F中的道路匹配,则进行属性变化的判断,如果F中没有道路与Li匹配,则道路Li为变化道路。通过对更新道路和原始道路的正向和反向匹配,可以得到新增、删除、几何变化、属性变化的道路。
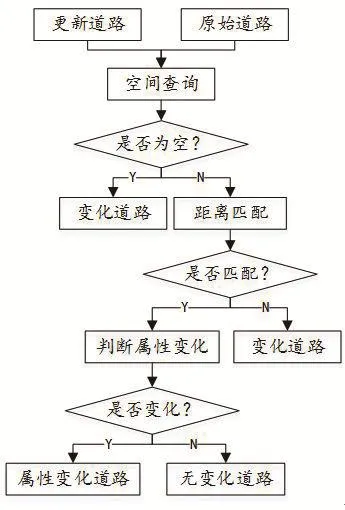
图4 空间匹配流程图Fig.4 Flow chart of spatial matching
2.2 程序开发
“天地图·福建”数据融合采用ArcGIS平台,包括数据更新和融合、数据建库管理等作业过程,因此,空间目标匹配算法基于ArcObjects10.1和Visual Studio2010进行开发。
ArcObjects提供了实现匹配算法需要的主要接口,包括缓冲区生成、空间查询、点到折线的最短距离计算等,都可以直接使用ArcObjects接口,这些接口的计算效率较高。为了提高空间查询的效率,数据在匹配前一定要建立空间索引,同时,数据格式采用File Geodatabase,能够保证在数据量较大时仍有较高的I/O效率。
空间匹配时遍历每条道路,首先要按照指定的距离生成道路的缓冲区,可以使用ITopologicalOperator.Buffer(),然后将缓冲区定义为ISpatialFilter的几何图形,使用IFeatureClass.Search()进行空间相交查询,查询结果返回游标IFeatureCursor,使用IPointCollection用来将道路折线转换为离散节点,目标道路转换为IPolyline,此时就可以使用IPolyline.QueryPointAndDistance()查询IPointCollection中每个点到IPolyline的最短距离,同时还能返回最短距离时在IPolyline上的点位坐标,对最短距离进行统计,然后通过最短距离的最大值和平均值与设定阈值的大小关系判断两条道路是否匹配。程序的界面如图5所示。

图5 空间匹配程序Fig.5 Interface of spatial matching program
3 试验分析
为了验证匹配算法的有效性和匹配精度,用漳州城区的1:10000(如图6a所示)和1:500(如图6b所示)道路进行空间匹配试验,通过人工判断的方法对变化要素进行匹配精度检验,1:10000道路199条,1:500道路1185条,人工提取变化和新增道路935条,删除道路42条,匹配程序的提取结果如图6c和6d所示,变化和新增要素中错漏62条,删除要素中错漏3条,按照统计匹配精度公式accuracy=sr/scr,其中,scr为人工提取的所有变化要素个数,sr表示程序计算的匹配结果中匹配正确的要素个数,根据上述统计,匹配精度accuracy=912/977=93.3%.
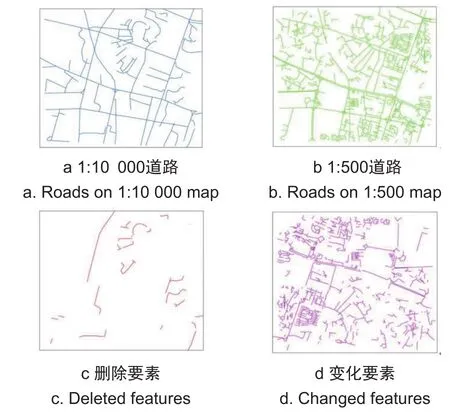
图6 1:10000、1:500道路数据及匹配结果Fig.6 Matching results of road data on 1:10 000 and 1:500 maps
此外,还使用主节点道路导航数据(如图7a所示)与福建省核心要素道路数据(如图7b所示)进行匹配试验,其中,核心要素数据是对1:10000DLG数据进行整合处理,去除涉密和专业性较强的要素,形成能满足大多数应用需求的主要要素,包括水系、居民地、道路、铁路、境界、城市绿地等。以福州市城区约25km2的样区进行试验,主节点道路4696条,福建省核心要素道路994条,主节点道路数据采用导航模型,数据比较“破碎”,城区道路比核心要素道路更为详细。人工提取出变化要素178条,删除要素1896条,匹配程序提取结果如图7c和图7d所示,变化和新增要素中错漏3条,删除要素中错漏10条,匹配精度为accuracy=2061/2074=99.4%.

图7 导航主节点道路和核心道路及匹配结果Fig.7 Matching results of navigation and core roads

表1 目标匹配结果统计Tab.1 Statistic of spatial object matching results
两组试验的统计结果见表1,跨比例尺道路数据的匹配精度与同类算法相当,相似比例尺道路数据的匹配精度高于同类算法[7-8]。本文采用的算法在跨比例尺道路数据匹配时的匹配精度达93.3%,比例尺相似的道路数据的匹配精度达99.3%。试验1中1:10000与1:500道路存在较多的m:n的对应关系,数据现势性相差两年,对匹配精度有较大影响。试验2中主节点道路与省级核心要素虽然数据模型不同,如主节点主干街道以双线表示,主节点道路没有明确的比例尺,但主节点道路与省级核心要素道路详细程度接近。主节点道路要素个数是省级核心要素道路要素个数的4.7倍,但对应关系主要是1:n的情况,因此,空间目标匹配精度较高。
综上所述,空间目标匹配能够对多源、多尺度道路数据进行目标匹配,并提取变化要素,线状地物空间目标匹配精度主要受匹配数据源的比例尺差异的影响,比例尺相差增大时,匹配精度随之降低。
属性的变化在几何匹配之后进行,属性匹配只需要通过字符串或数字比较,只要能够保证几何匹配准确,属性变化的提取就不会出错,因此,上述两次试验不对属性的匹配精度进行评价。通过空间目标匹配,可以快速发现多源数据中相同道路的属性变化和不一致。
4 结束语
空间目标匹配能够有效解决多源、多尺度道路数据在融合过程中变化要素提取的问题,也能够解决人工判断比较困难的属性的变化和不一致。匹配算法不仅可应用于道路的匹配,对水系线等线状地物同样有效。在“天地图·福建”、数字城市等项目建成后,对空间数据的现势性要求越来越高,为实现快速更新,除进行重要地物的变化监测,还必须有技术手段能够将多源、多尺度数据进行快速融合。
按照天地图的建设需要,福建省将开展天地图数据母库建设,母库将是“天地图·福建”的主要数据源,也是即将开展的国家应急测绘保障能力建设的基础。从原始库到精准版母库数据、精准版母库转换成公开版数据的过程中,都涉及多源、多尺度数据协调处理的问题,因此,空间目标匹配将在这些项目建设中发挥重要作用。
猜你喜欢
北京工业职业技术学院学报(2024年1期)2024-01-14 06:35:14
地理空间信息(2021年8期)2021-08-24 12:37:34
上海房地(2020年1期)2020-02-12 09:03:48
中学生数理化·七年级数学人教版(2017年10期)2017-04-23 06:29:20
东方教育(2016年8期)2017-01-17 14:20:41
浙江大学学报(理学版)(2016年1期)2016-05-14 09:12:26
项目管理技术(2015年3期)2015-04-23 08:44:29
体育科学研究(2015年5期)2015-02-28 17:06:39
计算机工程与设计(2012年3期)2012-07-25 11:05:00
电视技术(2012年1期)2012-06-06 08:13:58