
基于图像识别的非入侵式液位测量方法
2017-10-14 05:39:51周子佳
辽宁工业大学学报(自然科学版) 2017年4期
周子佳
基于图像识别的非入侵式液位测量方法
周子佳
(同济大学 中德工程学院, 上海 200092)
针对现有的液位检测系统存在不能同时满足非入侵式测量的高适应性、高准确性和高稳定性等问题,本文采用图像传感器,融合高精度标定技术及图像边缘处理技术提出了非入侵式液面高度测量方法,组建了由图像采集及高度测量两部分组成的液位检测机制。首先构建高精、高稳定的图像传感器与微处理器接口;然后通过软件驱动,实现基于图像传感器的实时图像采集系统;最后通过进行高精度标定,以满足实际运用。实验结果表明,采用CMOS图像传感器获取图像,通过差分边缘检测算子检测边缘特征点的方法,经过标定后,整个系统测量总精度达到±0.3 mm,能够满足在石油化工领域液面高度测量精度及测量范围的要求。
非入侵式;边缘检测;图像传感器;图像识别
液面高度测量方法是一种测量空气与溶液,溶液与溶液或者液体与固体的接触面的位置测量技术。这种技术在机械工程、化学工业、石油工业和水力学方面有广泛的应用。
原始的液面高度测量依靠人工读取刻度获得高度尺寸,这种方法存在人为读取的固有误差,并且不能获得高度的实时数据。随着超声波与光学传感技术的发展,这类发射型传感器能在非透明容器中利用液面反射进行液面高度的估算[1-3]。该方法对不透明的油井、油罐等液面的测量能取得较好的结果,但易受工作环境影响,无法保证测量的稳定性和抗噪性,且精度较低。
目前常用的液位检测方法为浮沉式测量法,但存在测量准确度低且极易受环境影响的缺点[4]。文献[5]通过向液体内部放进有色浮标的办法进行尺度计算,进而得到液面的高度,将图像处理技术应用到液面高度的测量中。这种测量方法具有较强的环境鲁棒性,静态液面高度测量的精度也较为理想。但这种测量方法不易于测量非透明液体(如化工领域的石油类产品)和动态液面的高度;而且其多采用侵入式的测量方案,容易产生测量以及安装等方面的误差。
近年来,随着信息技术的发展,掀起了融合电子先进设备与信息处理技术的高效、高精、稳定的测试技术[6]的研究热潮。
图像所包含的信息是现实世界的真实反映,随着图像处理技术和模式识别技术的长足发展,图像以其包含的丰富信息而异军突起,被广泛地应用于机器视觉、图像检索和车牌识别等领域[7-9]。通过判断空气和液面之间的分界面可以检测液面高度,而分界面是图像领域中的典型边缘,所以可以将分界面(液面)检测转化为边缘检测[10-12]。边缘检测主要考虑的是图像中相邻像素值的阶跃变化,是图像处理技术中的最重要、最成熟的分支之一[13-17]。
本文利用图像传感设备以及微处理器构造嵌入式图像采集系统,并依据先进的数字图像处理技术实时检测指定容器或器皿内部动态液面高度变化图像,实现高精度、高稳定性的跟踪测量,减少光学误差提高测量精度,最终构建非入侵式的液面自动检测系统。
1 图像采集系统设计
随着图像电子设备发展,图像采集技术日趋成熟,其主要采用图像传感器以及透镜成像原理,远距离采集高清图像。本文引入CMOS传感设备,构建了高效、稳定的图像采集系统。
如图1所示,在液体容器的一侧水平设置有支架,在支架上固定有用于采集透明液体容器图像的CMOS图像传感器,在透明液体容器的另一侧设有与CMOS图像传感器光轴垂直的散光板。透明液体容器的中心线、CMOS图像传感器的光轴及荧光灯管的中心线共面。CMOS图像传感器的输出接口与微处理器相接。荧光灯通过照射散射板并投射到被测液位,液位信号则成像到传感器。图像传感器接收到待测的图像信号,在微处理器中进行图像分析与检测,并将图像中液位高度信息传输到显示屏以及远程通信接口。
由于CMOS图像传感器不仅成像速度快、精度高,而且抗噪性强,因此,本系统选用OV9650彩色CMOS数字图像传感器用于静图像的获取。
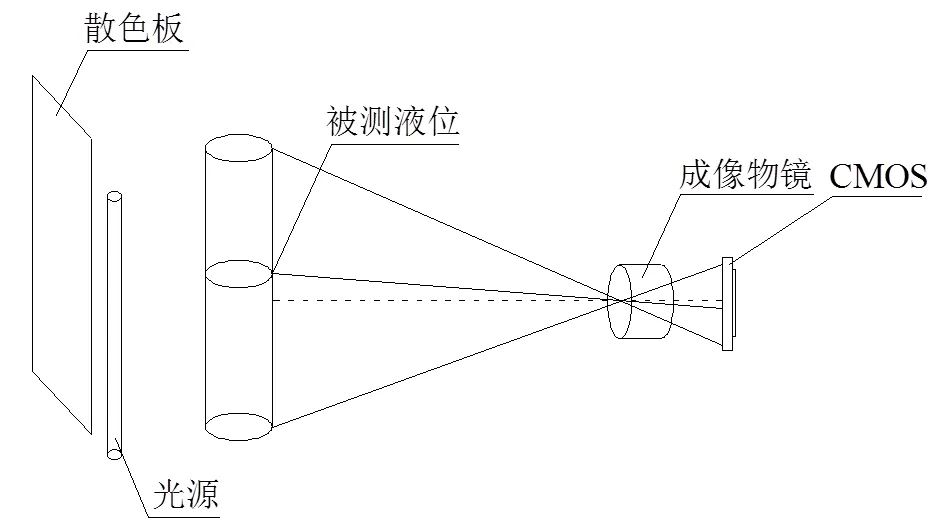
图1 液位成像示意图
在OV9650内部嵌入了1个8位数模转换器,每次可同步产生8位数字流信息,以及水平信号、同步时钟和帧信号,从而外部设备可读取图像信息。如图2和图3为输出信号之间的关系。

图2 行数据输出时序
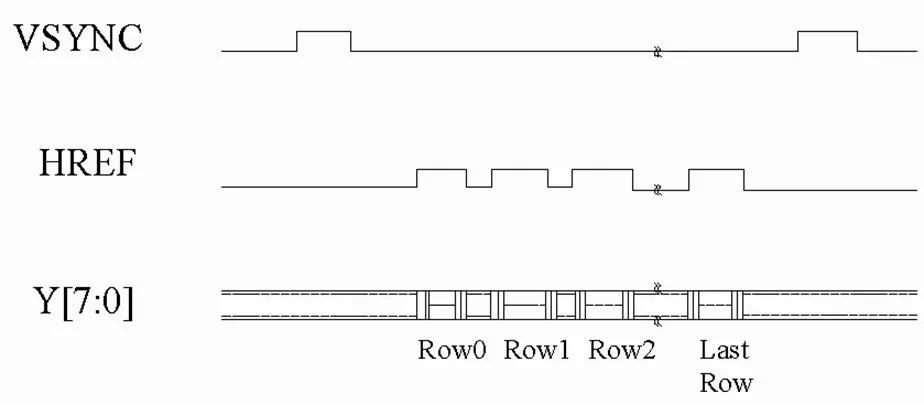
图3 帧数据输出时序
图像由1 300×1 028像素组成,并且对大多数信号处理发生的模拟处理部分寻址。模拟视频图像信号基于以下几个公式:

(1)
、、是等效颜色在每个像素点里的组成部分。YCC同样适合于以下公式:

(2)
/数据信号通过模数转换器实现从模拟式到数字式的(A/D)交换:通信信号通过视频多路器被传送到数字式视频端口。这种视频多路器可供用户选择16-、8-、或4-比特的视频数据以校正输出引脚。单片的8位A/D运行至9 MHz,并且与像素速率高度同步。实际兑换率与帧率有关。
2 液位高度测量设计
基于高精CMOS图像采集设施,并采用ARM微处理器构建嵌入式图像数据分析系统,如图4所示,基于图像边缘检测技术实现传感图像的实时分析,并将容器内液面高度值传输到远程终端以及LCD液晶屏幕上显示。
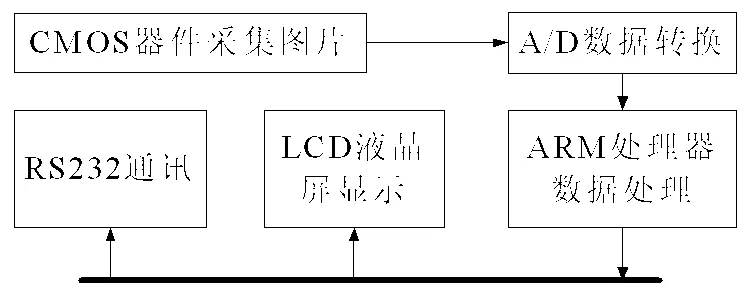
图4 非嵌入式液位检测框图
采用图像边缘检测方法实现图像中液位分析。图像液位边缘是指图像中灰度值发生突变的部分。通常图像灰度值的变化是根据其灰度分布的梯度来进行分析检测。因此,采用局部微分差分的分析方法来获得边缘检测算子。图5为本文所使用的图像分析步骤。
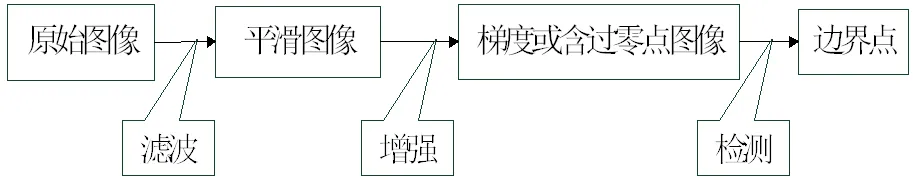
图5 图像分析流程
梯度是度量函数变化的参数,通常可将一幅图像看作是取样点的连续函数。其梯度亦可用离散逼近函数来近似:
由向量分析可知,梯度的方向定义为:
(4)
其中角是相对轴的角度。对于数字图像,基于离散差分的梯度可表示为:
通过边缘识别处理可获得精确的空气-液体的接触面的位置的图像像素,若想获得容器高度位置,引入了标定系数进行像素值与容器内实际液位高度的转换。
第一步 标定系数的计算
(1)将液位调整到容器内标准刻度处,采用标准读数标尺,通过多次求平均值方法,得到液位实际值1。
(2)调整并二次测量液位,在标定刻度1上下方±50 mm任意位置处,得到二次液位数值2,与标定值计算液位的间距差值(1-2)。
(3)采用图像检测方法对图像进行液位边缘识别,得到两幅图像中对应液位的像素值1与2。从而,获得实际液位高度标定系数1,它表示像素值与容器内液面实际高度值的比例关系:
1=(1-2)/(1-2) (6)
将得到的标定系数作为基准值数据(包括实际高度值1及与之对应的像素值1)保存在微处理器中。
第二步 实时检测图像并转换为容器内液位绝对位置
每一幅采集图像,通过图像检测与识别,得到像素液位值2,利用标定系数,可换算实际的液位值:
=1-(1-2)=2+(1-1) (7)
3 实验设计及结果分析
石油产品蒸馏过程需要实时地对液面高度进行测量,是典型的非入侵式的非透明液体高度测量,因此本文以石油产品蒸馏测定器为实验研究对象,如图6所示。

图6 石油产品测定与图像采集系统图
如图7所示,在图像的液位检测过程中,本文基于中值滤波图像预处理方法增强图像的视觉效果,突出图像中强度值显著变化的轮廓信息,进而利用差分边缘算子的计算检测图像中液位的边界点,本系统检测的液体为石油,其灰度值相差较大,本实验设相邻像素点灰度值相差大于80的为边界点。最终将检测的像素值转换为实际液位高度,并传输至远程接口。

图7 图像液位检测流程图
实验参数为:试管尺寸200×80 (mm)、输出频率4帧/s、图像尺寸1 300×1 028(像素)。为了减少计算量,提高运算速度,将图像调整为500´1 028(像素)。用OV9650采集的是1 300×1 028图像阵列,容器高(mm)。
因此,液位高度测量系统的理论精度为:
经测试,液面的上升速度或下降速度为二次函数,如图8所示。上升或下降速度最大不超过10 mm/s。
图8 液位上升-图
在线液体水平线测量是通过处理每一个图像的框架来获得一个持续性变化的液体水平线。存储所有的图像是很容易的,但是想获得精确的液体水平高度值是很难的。在系统中,调整液体输入率用来在容器的瓶颈和平稳的液体表面获得一个稳定的液体增长是很重要的。因此,通过处理每一个独立的图像,可以实现精确的在线测量。
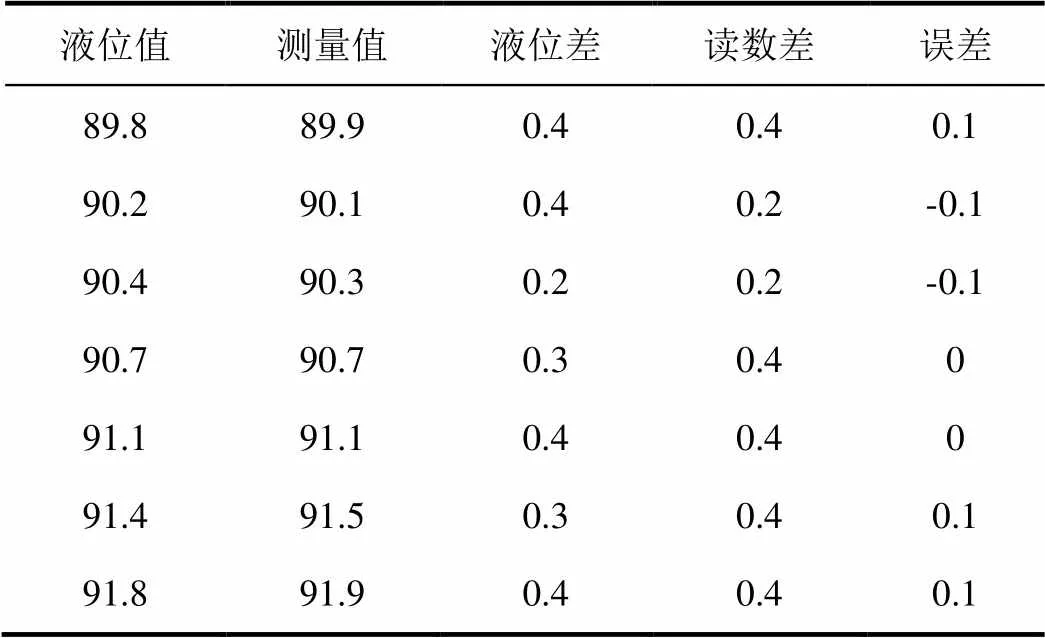
表1 液位检测结果分析 mm
实验中,测量系统的测量范围为0~200 mm。记录了容器内液位从89.8变化到91.8时的测量结果。由测量数据可见,测量的误差为±0.1 mm。实验证明,用图像差分检测算子获得边缘特征点,并转换为实际高度,系统的重复性很好,系统经过标定后,整个系统测量总误差达到±0.3 mm。
4 结论
液体水平高度测量方法是一种测量空气与溶液、溶液与溶液或者液体与固体的接触面的位置测量技术,在机械工程、化学工业、石油工业和水力学领域有着广泛的应用。为克服目前液位高度测量方法不能同时满足非入侵式测量的高适应性、高准确性和高稳定性的局限性,新的液面高度自动检测已经势在必行。本文创建了嵌入式图像采集系统的硬件平台,并开发了图像传感器软件驱动程序,实时采集待测容器内液位图像信息,在微处理器中对图片进行灰度化以及滤波增强,并通过差分边缘算子对图像进行液位边缘检测,将图像像素值转换为绝对位置,在LCD上实时显示出液面高度。最后在现有实验条件下对整个系统进行了验证,实验数据处理结果表明,此方法能够高效、稳定地实现非侵入式实时液位检测,并且在测量精度方面满足了石油化工等领域中对于液位测量精度的要求。
[1] 李永鉴, 刘国安. 简易超声波测距仪的制作[J]. 福建电脑, 2006(7): 131-132.
[2] 曾文, 琳施倩. 超声波测量室温硫化硅橡胶涂层厚度的可行性研究[J]. 福建电力与电工, 2006, 6(2): 37-39.
[3] 李喆, 丁振良, 袁峰. 光学测量的飞行器空间姿态测量方法[J]. 哈尔滨工程大学学报, 2008, 29(3): 232-236.
[4] 吴琼, 张国雄, 樊玉铭. 基于CCD摄像法进行液位测量的研究[J]. 宇航计测技术, 2008, 28(2): 1-4.
[5] Zhao Cuilian, Chen Yu. A New Liquid Level Measuring System of Standard Metal Tank Based on Sub-pixel Edge Detection[C]. Shanghai: IEEE International Conference on Control and Automation, 2007: 3207-3212.
[6] 马玉真, 胡亮, 方志强, 等. 计算机视觉检测技术的发展及应用研究[J]. 济南大学学报, 2004, 18(3): 222-227.
[7] Canny J. A Computational Approach to Edge Detection[J]. IEEE-PAMI, 1986, 8: 679-698.
[8] Acharya T, Ray A K. Image Processing: Principles and Applications[M]. New Jersey: John Wiley & Sons, Inc., Hoboken, 2005.
[9] Gonzalez R C, Woods R E. Digital Image Processing Second Edition[J]. Electronics Industry, 2005, 3: 26-30.
[10] Mallat S, Huang W L. Singularity Detection and Processing With Wavelet[J]. IEEE Trans, 1992, 38(2): 617-643.
[11] Mallat S Zhong. Characterization of Signal from Multi-scale Edge[J]. IEEE Trans PAMI, 1992, 14(7): 710-732.
[12] 杨群, 洪春勇, 刘海英. 基于灰度图像的边缘检测方法[J]. 科技广场, 2005, (5): 34-37.
[13] Hu J, Sun J X, Shao X F, et al. The Algorithm for Image Edge Detection and Prospect[J]. Computer Engineering and Application, 2004, 40(14): 52-54.
[14] Yang S Y. Image Processing Program Design Using VC++[M]. Second Edition. Beijing: Tsinghua University Press, 2005.
[15] 邓动伟. 图像边缘检测算法的改进及其应用研究[D]. 长沙: 湖南师范大学, 2016.
[16] 李正, 张海. 一种基于梯度方向一致性的边缘检测新算法[J]. 电子与信息学报, 2016, 38(7): 1674-1681.
[17] 吴云飞. 钢液液面高度自动测量系统的研制[D]. 南京: 东华大学, 2016.
责任编校:孙 林
Method of Non-contact Liquid Level Detection Based on Image Recognition
ZHOU Zi-jia
(Sino-German College of Applied Sciences, Tongji University, Shanghai 200092, China)
Aiming at the problem of current liquid level detection which cannot meet the requirement of a non-contact measuring method with good adaptability, high accuracy and reliability, this paper proposes a liquid level measurement based on image edge detection by using COMS image sensor. This paper synthesizes the technology of precise calibration and image edge detection in a non-contact liquid level measurement, and constructs liquid level detection composed of image acquisition and the level detection. Firstly, the interfaces of CMOS image senor and S3C2440 processor are built; secondly, images by CMOS image sensor after designing driver software are acquired; thirdly, the system to supply the practical manipulation is calibrated. The experimental results indicate that after using CMOS image sensor to acquire images, detecting features of image edge by difference edge operator, and calibrating, this system can achieve the precision of ±0.3mm. It can meet the demands of detecting liquid level in the areas of chemical and petroleum industry.
non-contact measuring method; edge detection; image sensor; image recognition
10.15916/j.issn1674-3261.2017.04.006
TP212
A
1674-3261(2017)04-0234-05
2017-03-11
周子佳(1998-),男,辽宁锦州人,本科生。
猜你喜欢
阅读(快乐英语中年级)(2022年11期)2022-05-30 10:48:04
读者·校园版(2019年24期)2019-12-10 06:44:03
阅读(科学探秘)(2019年4期)2019-06-19 01:13:34
测控技术(2018年9期)2018-11-25 07:45:00
石油化工自动化(2018年5期)2018-11-14 02:34:30
电子测试(2018年6期)2018-05-09 07:31:47
小朋友·聪明学堂(2015年8期)2015-11-30 23:53:53
汽车维护与修理(2015年2期)2015-02-28 12:15:41
河南科技(2014年14期)2014-02-27 14:11:57
科技传播(2012年10期)2012-06-06 09:46:22
