
矿用提升机液压站变频控制系统设计
2017-10-12 09:33,,
林业机械与木工设备 2017年10期
, ,
(1.昆山登云科技职业学院,江苏 昆山 215300;2.昆山恒睿测控软件技术有限公司,江苏 昆山 215300)
研究与设计
矿用提升机液压站变频控制系统设计
卢美鸿1,朱圣华1,伍路旺2
(1.昆山登云科技职业学院,江苏 昆山 215300;2.昆山恒睿测控软件技术有限公司,江苏 昆山 215300)
液压站是矿用提升机的一个重要部件,传统的液压系统在提升机运行过程中液压泵始终处于全速运行状态,需要以最大流量为系统供油,存在机械磨损严重、噪声大、能耗高等问题,处于一种不经济运行状态。为解决上述问题,本设计在保持现有液压站基本结构不变的基础上,采用PLC和变频控制技术对液压站的压力调节进行设计和改造,使其具备更高的安全性和更好的经济性。
矿用提升机;液压系统;PLC控制;变频控制
Abstract:A hydraulic station is an important part of a mine hoist,and in a traditional hydraulic system,a hydraulic pump operates at a full speed all the time in the hoisting operating process to supply oil to the system at the maximum flow and it involves such problems as serious mechanical wear,high noise,high energy consumption and uneconomical operation status.In order to solve the above problems,on the basis of maintaining the basic structure of the existing hydraulic stations,PLC and variable frequency control technology are adopted to design and renovate the pressure regulation of hydraulic stations to make them safer and more economical.
Keywords:mine hoist;hydraulic system,PLC control,variable frequency control
1 研究目的
液压站是矿用提升机的一个重要部件[1],主要由油泵和液压控制阀组成,其功能是为提升机制动系统提供液压源,以及对提升机进行制动或松闸控制,保障提升机的工作制动和安全制动。随着提升机制造技术的不断发展,与之配套的液压站也经过了不断的改进与完善,其工作性能特别是安全可靠性得到了很大提高,但其调节压力的基本原理并没有改变,依然是采用由液压泵将低压油加压变为高压油,再经压力调节阀对高压油的压力进行调节,以适应提升机制动闸动作所需要的压力。
提升机运行时液压系统压力调节过程如下:当提升机滚筒转动需要打开制动闸时,系统需要较大的压力,这时压力调节阀的开度要减小;当提升机需要制动时,系统需要较小的压力,这时压力调节阀的开度要增大。为了满足制动系统油压力的快速变化,提升机在运行过程中制动油泵始终处于全速运行状态,需要以最大流量向系统供油。特别是在制动闸处于全打开的状态时,油泵供油压力达到最大值,电机负荷也最大,这样会造成油泵机械磨损大,噪声大,能耗高,使油泵处于一种不稳定和不经济的运行状态。本设计在现有液压系统基本结构的基础上,通过对制动油泵加装变频控制,实现制动油泵的节能运行,并减少了油泵机械磨损、降低了运行噪声。
2 设计思路
在原有液压系统的基础上,通过加装变频自动控制系统,将油泵定量供油和单独依靠压力调节阀溢流的调压方式改为“调节油泵转速+调节压力调节阀溢流量”的综合调压方式。
(1)在制动油泵电源回路中加装变频器即可实现油泵的变频控制,使油泵转速能够根据液压系统压力的调节需要而改变,而不是全过程都处于全速运行状态,这样可以节约电能和减小机械磨损。
(2)加装PLC或使用提升机控制系统中原有PLC对液压系统的油泵和压力调节阀进行自动控制[2-5],实现“调节油泵转速+调节压力调节阀溢流量”的综合调压方式,使液压系统运行平稳,调压响应迅速。
(3)液压系统中的其他各控制阀保持原有功能不变。
3 系统控制过程
系统控制结构简图如图1所示,在PLC编程软件中设定油泵的最低转速和调节阀的最小开度,将制动手柄输出的0~10 V信号由原来直接调整制动压力改为系统油压给定信号输入至PLC。PLC对制动油压调节过程为:压力传感器将检测到的实时压力传送至PLC(即反馈信号),通过与手柄给定的压力信号进行比较,将比较结果用于对压力调节阀开度和油泵电机转速的调节,从而实现对系统压力的闭环控制。根据制动手柄所处位置的不同,对各阶段制动油压控制方式如下。
(1)制动手柄处于全制动位置时的油压控制:当制动手柄处于全制动位置时,PLC接收到“全制动”信号后控制油泵停止运转,调节阀处于失电状态。此时系统制动油压为零,提升机制动闸的制动力为最大。
(2)制动手柄处于调压位置时的油压控制:当制动手柄移至调压区间(即全制动与全松闸之间的位置)时,油泵首先快速启动并以全速运行,系统油压仅取决于压力调节阀的开度,其压力调节过程与液压站工频运行一致。
(3)制动手柄处于全松闸位置时的油压控制:当制动手柄移至全松闸位置时,PLC接收到“全松闸位置”信号,这时输出最大模拟量信号,闸电流放大板的输出电流为最大值,而压力调节阀的溢流量可降至最少,同时PLC自动将PID目标压力值调至小于最大设定值(以闸瓦能全松闸为准)。这样,液压系统在保持松闸压力的状态下油泵以很低的转速运行,从而实现节能运行。
上述三种状态不仅适用于提升机“手动”控制模式,也适用于“全自动”控制模式。
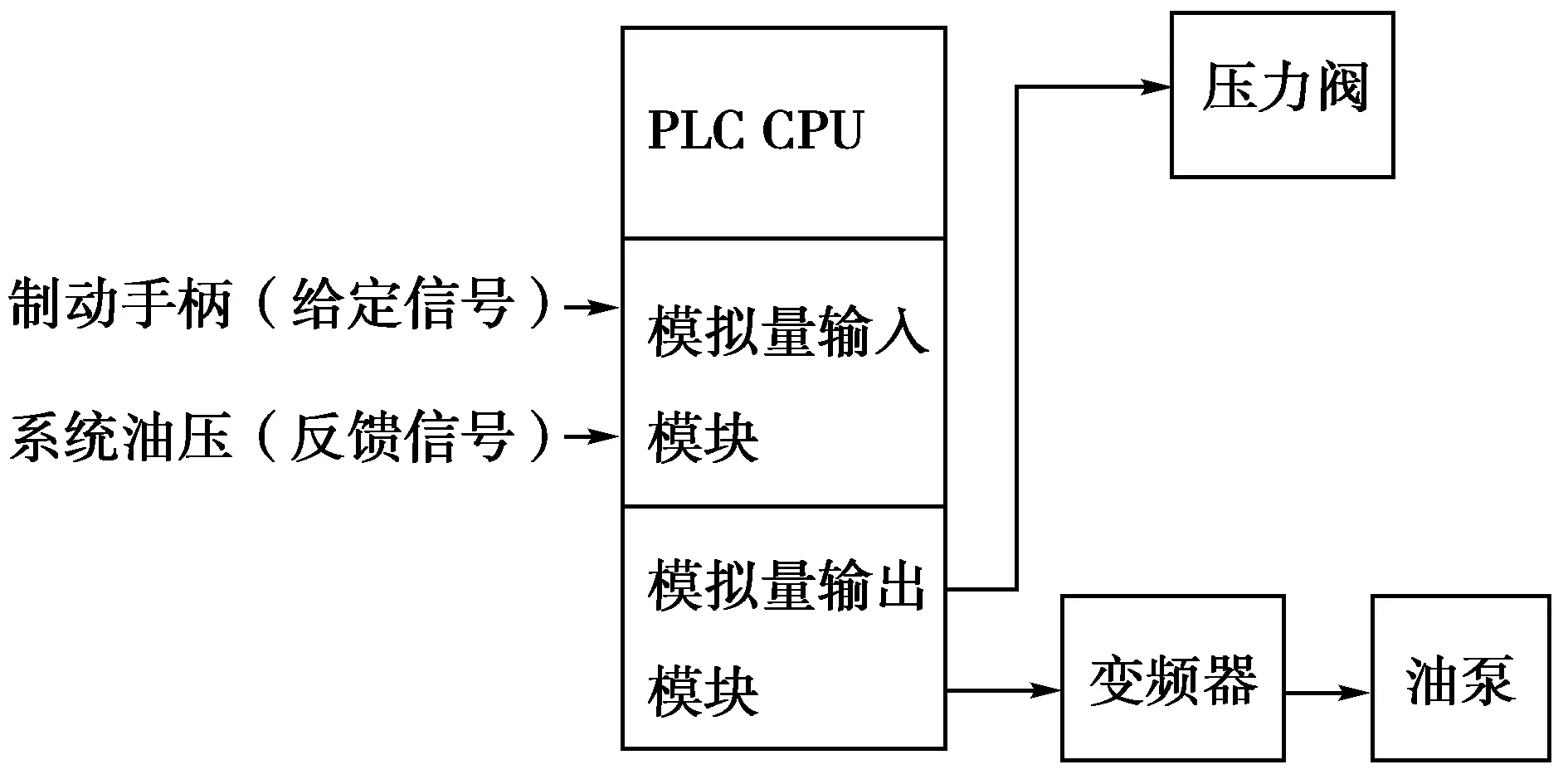
图1 控制系统结构简图
4 系统硬件设计
(1)液压站通常配备两台油泵(一用一备),本设计还需配备一台变频器,并加装转换开关,以实现“一控二”的控制方式。为保障在变频器发生故障时液压站仍能正常工作,制动油泵还需保留原有的工频运行控制功能,并可通过转换开关进行工/变频切换。液压系统启动频繁且为重载启动,因此必须选用具有恒力矩特性的通用型变频器,而且其额定容量应大于油泵电机额定功率1~2个档级。
(2)根据提升机电控系统的结构状况确定是利用提升机电控系统中现有的PLC还是另加装专用的PLC。选用提升机电控系统现有的PLC时只需增加模拟量输入和输出通道各2个,并对原PLC程序进行修改(添加对液压站的变频自动控制功能)即可;而选用加装专用的PLC时(适合于提升机电控系统未配置PLC的情况)可选用FX系列的小型PLC同时配备具有2个模拟量输入和2个模拟量输出通道的扩展模块。
5 系统软件设计
系统控制程序流程如图2所示。

图2 系统控制程序流程
6 系统调试
在无条件进行实物模拟调试的情况下一般采用现场调试法,即在机械和电气整体安装完成以后进行调试工作。为了确保提升机在液压站调试过程中的安全,在调试前必须使用提升机滚筒锁紧装置将滚筒锁死以防滑车,具体调试过程如下。
(1)采用工频控制方式运行,通过操作制动手柄调节制动油压,记下制动闸瓦打开时的压力值,并将此压力值作为变频运行全松闸状态时的设定值。在工频运行方式下检查PLC对各液压阀的控制是否正确,检查和调节二级制动压力等,直至液压站各部件均达到正常动作状态,系统压力控制灵敏、准确为止。
(2)将液压站控制系统切换到变频运行方式运行[6],并将各设定参数输入至PLC。分别使制动手柄处于全制动、全松闸和压力调节区间三个位置,观察制动油压变化是否正确。
(3)将提升机滚筒解锁,在提升机空载运转状态下对液压站进行动态调试。先进行人工手动操作检查和调试工作制动状态,待正常后再进行安全制动试验。如果提升机具有全自动运行功能,则还需进行提升机全自动运行状态下的制动性能检查和调试。
7 小结
目前我国拥有井工矿山企业达数万个,这些矿山几乎都在使用矿用提升机作为主要提升运输设备[7]。迄今为止,国内生产的矿用提升机液压站均采用传统的工频运行方式,存在噪声大、机械磨损严重及耗电量大等问题,这是广大矿山科技人员一直力求解决的一大难题。设计矿用提升机液压站变频控制系统,实现液压站变频自动控制,可较好地克服上述问题,实现节能运行。该项技术的应用将使矿用提升机产品的技术水平得到进一步提高,具有很好的经济价值和广阔的应用前景。
[1]付子义,潘萍.分段式PMLSM垂直提升控制系统设计[J].电气传动,2007,37(11):55-57.
[2]卢美鸿,刘国海.王富良,等.基于PLC的两电机同步系统神经网络逆控制[J].电气传动,2007,37(11):50-54.
[3]卢端方,李玮,周国兴.SINUMERIK 840D系统在数控专用机床改造中的应用[J].林业机械与木工设备,2013,41(8):58-60.
[4]孙燕良,张厚江,翟艳凤,等.基于PLC气动机械手的研究设计[J].森林工程,2011,27(3):45-50.
[5]伍福德.交流接触器无声运行技术在TKD控制系统中的应用[J].矿山机械,2000(7):69-70.
[6]孙晓磊,张全柱,邓永红.矿用变频器SPWM差模输出电压谐波分析[J].电气传动,2015,45(8):24-28.
[7]伍福德.链传动1t矿车翻车机结构设计与主要参数的选择[J].矿山机械,2000(8):26-28.
(责任编辑 张雅芳)
·行业内外·
DesignofaVariableFrequencyControlSystemforMineHoistHydraulicStations
LUMei-hong1,ZHUSheng-hua1,WULu-wang2
(1.Kunshan Dengyun Science and Technology Vocational Technical College,Kunshan Jiangsu 215300,China; 2.Kunshan Hengrui Measurement and Control Software Technology Co.,Ltd.,Kunshan Jiangsu 215300,China)
2017-05-24
卢美鸿(1981-),女,江苏海安人,讲师,硕士研究生,主要研究方向为自动控制技术,E-mail:58745145@qq.com。
TD534
A
2095-2953(2017)10-0034-03
猜你喜欢
山东冶金(2022年4期)2022-09-14
电子乐园·上旬刊(2022年5期)2022-04-09
汽车实用技术(2022年4期)2022-03-07
昆钢科技(2021年2期)2021-07-22
冶金设备(2019年6期)2019-12-25
山东煤炭科技(2019年10期)2019-11-01
装备制造技术(2019年1期)2019-04-22
汽车与驾驶维修(维修版)(2015年4期)2015-08-16
中国高新技术企业(2015年13期)2015-04-30
