
基于Arduino开发板的微型仿生昆虫机器人
2017-09-23 12:08王艺翔张浩然罗敬涛
科学与财富 2017年26期
王艺翔+张浩然+罗敬涛


摘 要:微型仿生机器人体积小,质量轻,使用高集成度小型Arduino Leonardo开发版为主控装置,下方高扭矩舵机为行进装置,并由舵机带动腿部和足部进行移动,锂电池供电。通过头部的红外对管传感器,舵机两旁火焰传感器模块对周边环境情况进行检测,若接近发生火灾空间,可以通过携带的蜂鸣报警器进行报警,即可以实现通过仿生机器人进入狭小空间,让空间外部的人们了解空间内部的火势情况。
关键词:Arduino,高扭矩舵机,火焰传感器,模数转换
Project 20161824 supported by Double E project, School of electrical engineering, Northwest University For Nationalities.
1、前言
近年來,有不少操作机器人开始广泛应用于工厂的各个生产过程,足移动方式的机器人可以相对较易地跨过比较大的障碍(如沟、坎等),并且机器人的足所具有的大量的自由度可以使机器人的运动更加灵活,对凹凸不平的地形的适应能力更强[1]。本文提出通过Arduino Leonardo高集成小型开发板为主板,集合高扭矩舵机,红外传感器,火焰探测模块及蜂鸣报警器为主要部件,使该微型仿生机器人能够进入密闭狭小空间进行小范围环境探测,能够在消防救援领域给救援人员带来方便。
2、Arduino主控与各项传感器模块的硬件设计
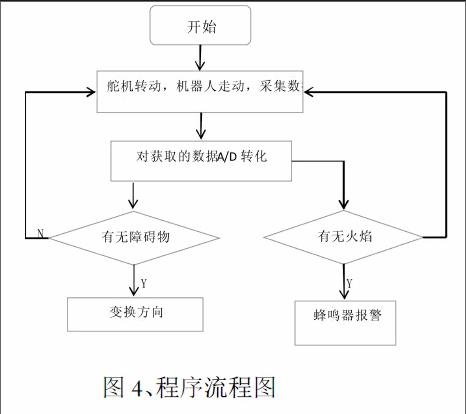
这一部分讲解各传感器跟主板之间的连接。所有部分由3.7V/ 180mAh锂电池供电,将头部的红外传感器接到Arduino主控板的数字量IO口,红外模块发射管发出红外线,接收管接收,使机器人能够避开前方的障碍物;将舵机两旁的火焰传感器接到主控板的模拟量IO口实时将传感器获取的模拟量数据接收回来,利用Arduino开发板的A/D转换功能将收回的模拟量数据转化成数字量数据与所设阈值范围进行比较,从而判断机器人周围环境情况;如果转化成的数字量超出了所设阈值范围,则启动与数字量IO口相连的蜂鸣报警器报警,若在此阈值范围内,则不会报警,继续监测。
3、机器人行走的设计
舵机是一种位置伺服的驱动器,由者单片机发出信号,其内部有一基准电路,产生周期为 20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,从而获得电压差输出。由电路板上的 IC 判断转动的方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位,其旋转角度一般为0~180°。控制器转动是通过调节PWM信号占空比实现的。标准PWM信号固定周期为20ms(50Hz),理论上脉宽分布在1ms到2ms之间,脉宽和舵机的转角0~180°相对应[2]。
借助Ardublock1.6.5编译环境对主控板烧写程序。按下开关,当机器人前方没有障碍物的时候,默认为舵机1正转,舵机2反转使机器人往前行进。若遇到前方出现障碍物,则两舵机转速提高让机器人原地转弯,直到红外模块没有检测到障碍物为止。当然检测的距离可根据环境大小自行调整,避免机器人长时间原地打转的情况出现。
4、结语
本项目利用了Arduino小型开发板方便于人们及时了解环境空间内部情况,但硬件、软件方面还需进一步改进,让机器人探测范围变广,让人们获取到的数据更加准确。
参考文献:
[1]宋一然.微型六足仿生机器人的研究.莆田学院.2005
[2]蓝宙电子Arduino入门套件使用说明[M].芜湖:蓝宙电子.2016
作者简介:
王艺翔,男(汉族),山东日照人,西北民族大学电气工程学院本科在读生,研究方向:通信工程。此项目由西北民族大学电气工程学院双e
项目资助。
其他作者:张浩然,罗敬涛。
