
基于逐次二角法与ARM芯片的路面测量系统
2017-09-20 06:15何伟铭
电子科技 2017年9期
何伟铭, 钱 程,甘 屹
(1.上海理工大学 机械工程学院,上海 20093;2.中央大学,东京 112-8551)
基于逐次二角法与ARM芯片的路面测量系统
何伟铭1,2, 钱 程1,甘 屹1
(1.上海理工大学 机械工程学院,上海 20093;2.中央大学,东京 112-8551)
为更加精准和快速地检测路面的高程数据,设计了一种基于逐次二角法理论与ARM芯片的路面不平度测量系统。该系统通过旋转编码器采集行驶距离和角度变化,以自研发ARM采集系统采集分析数据,采用Modbus通讯协议进行上位机信息交互,通过实际测量,定点距离测量准确率达99.92%,定点角度测量准确率达99.67%。在路面单线测量中与水准仪所测数据相比准确率可达92.7%,最大偏差<5.4 mm。
路面高程;逐次二角法;ARM芯片;可编程数字滤波;Modbus通讯协议
随着我国汽车保有量连年增加,到2015年底我国机动车保有量已经超过2.79亿,年增速更是破2 000万辆[1]。陡增的车辆也加剧了路面状况的恶化,而过于不平整的道路会导致:(1)影响行车安全;(2)降低行车的舒适性;(3)增加车辆的养护费用,如油耗的增加,机件的损坏[2]。另一方面,人们对于汽车乘坐的舒适性要求又与日俱增。车辆是通过轮胎和路面的相互作用产生驱动力来保证正常行驶的,因此研究路面与轮胎的耦合作用原理对提高车辆的乘坐舒适性和车辆通过性有重要的意义,而真实、精确的三维路面谱在研究车辆耦合仿真、车辆振动性能测试上尤为重要[3-5]。如何准确的采集路面数据然后重构出精确的路面谱成为了工程界研究的热点。
路面形状的测量方法和仪器有很多种,按照测量基准分大致有5类:(1)固定基准,如水平仪-标杆测量方法,直梁基准测量方法,3m直尺测量方法等;(2)随动基准,如多轮测平车等;(3)递推基准,如TRL高速路面计等;(4)惯性基准,如GME路面计,APL路面纵剖面仪等;(5)角度基准,如AASHO道路纵剖面测量仪,真实路形计(三角度求和方案)[6-7]。
为实现路面高程数据的精确测量,本文提出设计了一种基于逐次二角法与ARM芯片的路面测量系统,并进行了理论和实验验证,证明了此方法具有测量效率高、测量准确性高、易实现、操作简单等特点。
1 测量系统的理论及方案
1.1 测量系统的理论基础
逐次二角法(Sequential Two Angles Method,STAM)是日本的福原敏彦、佐藤壽芳等人在提出逐次二点法(Sequential Two Points Method,STPM)的基础上,提出了将连续的变化的角度数值转换为高度上的位移变化数据的测量理论。因此便可以将逐次二角法用于测量路面表面的凹凸形状测量[8-9]。
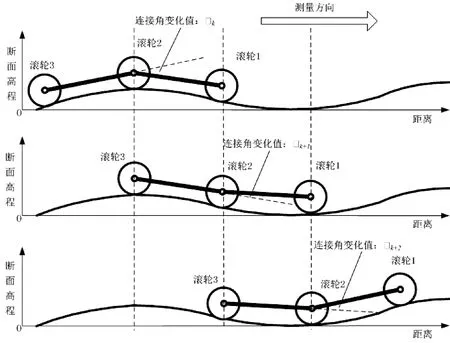
图1 模型简化图
图1所示为逐次二角法测量的原理,假设初始位置装置的前后连杆夹角为θ0,当测量装置沿测量方向前进杆长距离L时,前后连杆间的夹角相应的变化值为θ1,则夹角为θ0+θ1,对应的坐标为(x1,y1)。当装置再次前进相同的距离L时,前后连杆间的夹角会产生大小为θ2的变化,此时连杆间夹角为θ1+θ2,对应的坐标为(x2,y2),依次类推,可得在前进距离达到n个L时,两连杆间夹角及相应的坐标(xn,yn)。
由几何关系可得第一点坐标,第二点坐标如下
x1=Lcosθ0,y1=sinθ0
(1)
(x1,y1)=(Lcosθ0,Lsinθ0)
(2)
(x2,y2)=(x1+Lcos(θ0+θ1),y+Lsin(θ0+θ1))
(3)
(Lcosθ0+Lcos(θ0+θ1),Lsinθ0+Lsin(θ0+θ1))
(4)
依此类推,可得第n点坐标(xn,yn)如下
(5)
(6)
(7)
n=1,2,3,…,N-1
(8)
式中,L为连接杆的长度;θn为第n点时连接杆夹角的变换值;αn为第n点时连接杆与水平方向的夹角;xn和yn为第n点的横坐标与纵坐标值。
1.2 测量系统的硬件结构方案
基于逐次二角法的路面测量系统结构主要如图2所示:包括测量装置平台,数据采集系统,数据预处理及分析软件,计算机平台以及相应的Matlab处理程序组成。其中测量装置平台包括了行驶部分、承载部分、传感器与电路部分、辅助部分组成。数据采集部分主要使用两个增量式旋转编码器完成,一个作系统的距离测量用,一个负责测量系统的角度测量,再将数字信号输入基于32位RISC的ARM芯片的计数及数据采集系统中完成脉冲数据的识别和计数再通过RS-485接口与电脑进行通信,通过Delphi软件进行通讯及数据记录,导出Excel表格。再通过Matlab程序将数据代入逐次二角法模型,生成单线上的路面高程形状曲线。
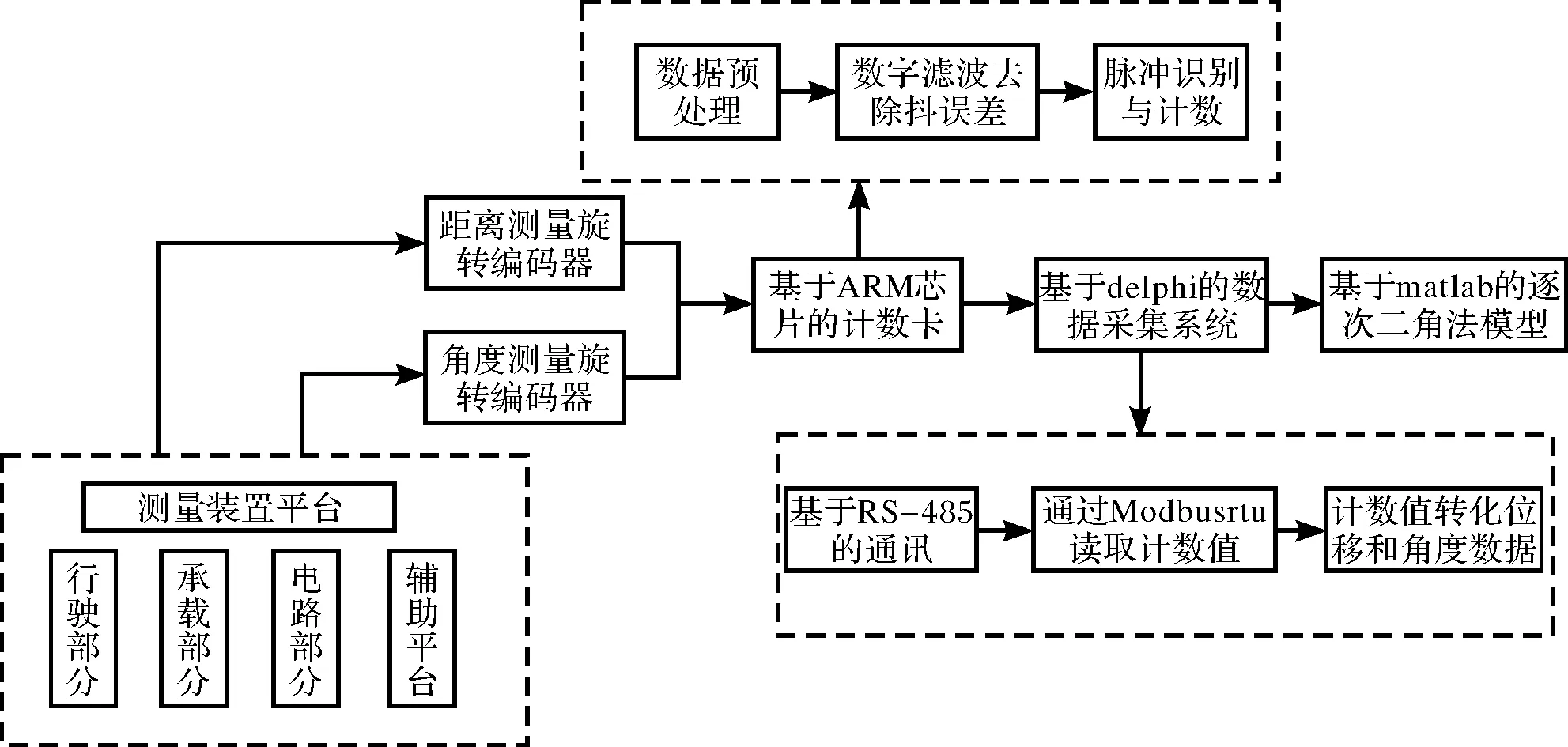
图2 测量系统原理框图
1.3 测量装置平台的主体外形
测量系统的主体装配图如图3所示,2根前连接杆、2根后连接杆将3排滚轮以L=300 mm的轴距连接,滚轮周长为300 mm。测量装置安装有2个NEMICOM光电增量式旋转编码器,刻度分别为360脉冲/转和3 600脉冲/转,采用12 V直流电源供电。

图3 测量装置装配效果图
图4所示为测量平台的距离编码器布置设计;前部轴心贯穿滚轮,通过紧定螺钉固定,确保滚轮与轴同步旋转,同时轴的一端与距离编码器连接,利用编码器上的紧定螺钉将两者固定连接,即可将轴的旋转传递至距离编码器,滚轮行驶的距离可通过距离编码器测得,滚轮与轴承之间套有套筒,用于轴向定位依据以上机构设计对测量装置的相应部件进行设计。
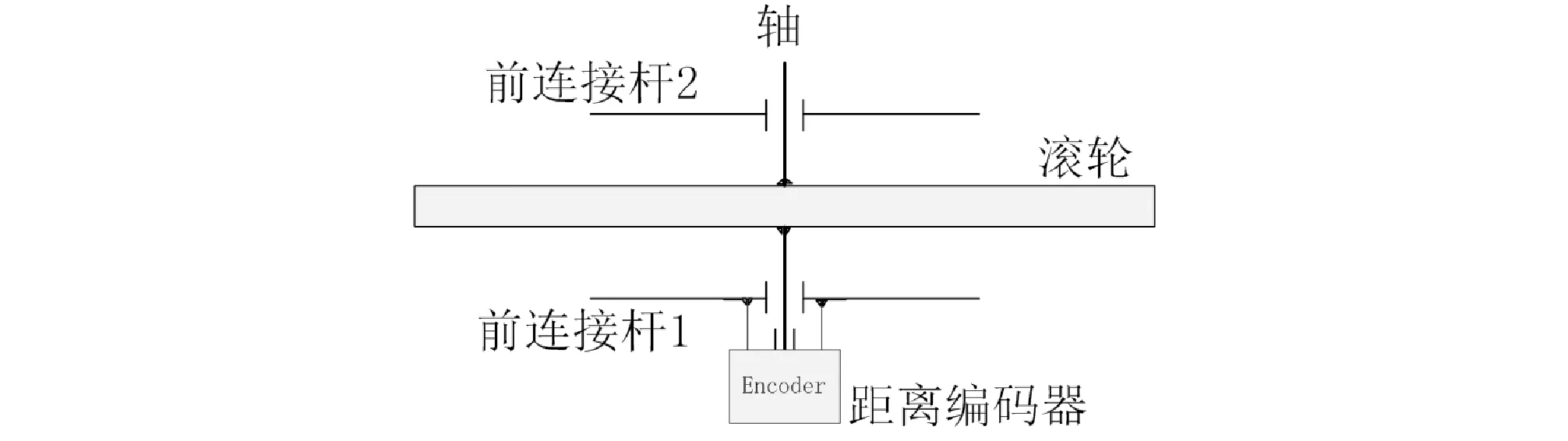
图4 距离编码器的机构设计
2 数据采集系统与分析软件
2.1 基于AMR芯片编码器的解码功能
数据采集模块的原理框图如图5所示,模块主要由电源、计数电路、隔离与非隔离双输入、RS-485隔离通讯接口等组成,模块的微控制器采用32位RISC的ARM芯片,具有快速的数据处理能力,并采用了看门狗电路,可以在出现意外时将系统重新启动,使得系统更加稳定可靠,可以应用在高性能和高速度的环境。但是因为在路试过程中路面的不平所产生的震动会传导到测量系统上产生脉冲抖动,所以对输入信号采用了可编程数字滤波,大幅降低了测试工程中震动干扰对模块正常运行的影响。
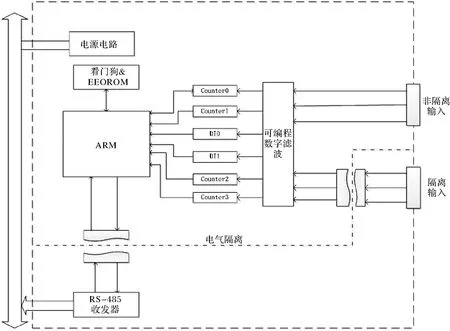
图5 数据采集模块原理框图
基于ARM芯片的数据采集系统设计为具有编码器解码功能,可以对正交编码器的输出信号进行解码,通过读取端口资源寄存器,可以直接获得运行方向,运行角度和脉冲计数[11]。
正交编码器又称为增量式编码器,用于检测旋转运动系统的旋转方向、旋转角度和转速,一般有3个输出信号:A相、B相和索引信号[12]。表1为正交编码器与采集卡的连线方式。
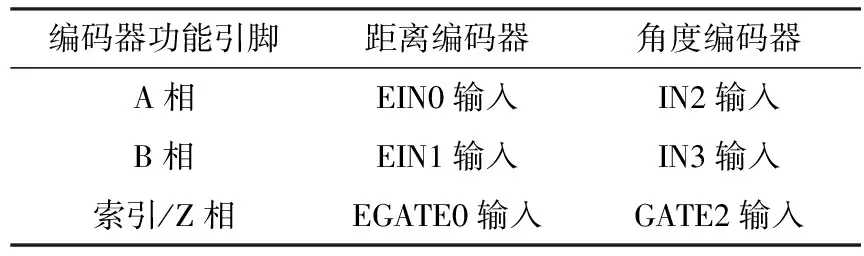
表1 正交编码器与采集卡连线方式
2.2 可编程数字滤波
由于路试时路面不平所引起的车架震动会导致测量系统的脉冲抖动和误计数,所以同时为测量系统配备了可编程数字滤波功能,每个输入通道可以独立配置滤波参数。单位为1 μs,滤波的范围为1~65 535 μs。[13]当滤波参数设置为0时,表示禁止该通道的数字滤波功能;当滤波参数设置为非0值时,表示使用数字滤波功能。当输入信号的高电平时间或者低电平时间小于滤波器参数时[14],该信号将被滤除,信号滤除原理如图6所示。

图6 信号滤除原理
具体的滤波滤除机理如表2所示,设置滤波器参数Fdiv后,当输入信号的低电平或高电平保持时间小于滤波参数,该信号都将被滤除,而对于电平保持大于滤波参数的信号,存在一个过渡区,输入信号可能被滤除,也可能通过。

表2 滤波滤除机理
2.3 MODBUS通讯协议
数据采集模块通过RS-485连接到计算机,采用标准的MODBUS协议进行通讯,通讯解码流程如图7所示[14]。
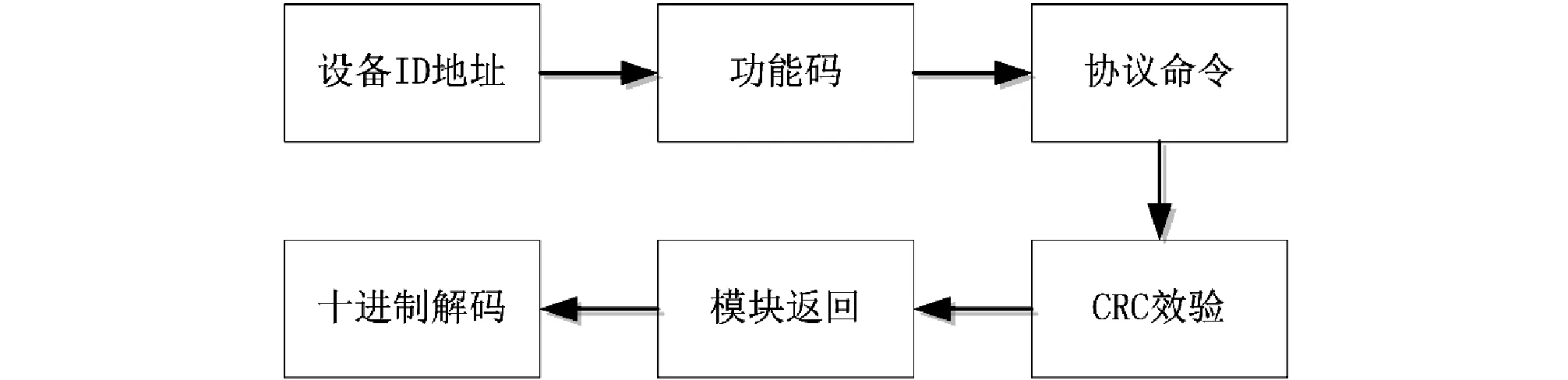
图7 通讯解码流程
对于每个I/O资源地址,分配一个对应的Modbus功能码进行操作,具体操作如下:资源节点地址为0x0040-0x005f,采用04(读输入寄存器)功能码进行读取,每个寄存器存放1路AI采样值,功能码的请求及响应帧格式[15]。
以读取距离编码器数值为例,发送指令:01 04 00 40 00 02 70 1F。其中,01为模块地址;04为读取输入型寄存器的功能码,编码器的计数值定义为输入型寄存器;00 40为编码器0的计数值的寄存器起始地址;00 02为读取的寄存器的数量,一个编码器的计数值占用两个寄存器地址,所以是02;70 1F为CRC检验码。模块返回:01 04 04 00 00 23 93 A2 D9。其中,01为模块地址;04为功能码;04为返回数据的字节数量,一个计数通 占用两个寄存器地址,一个寄存器为一个字(2 Byte),所以是4 Byte数据。
00 00 23 93编码器当前的计数值,数值高位在前,转换为十进制的方法为:(1)把00 00 23 93转换为十进制为:00 00 35 147;(2)计数值 = ((00×256+00)×256+35)×256+147 =9 107。A2 D9为CRC检验码。
3 实验验证与结果分析
3.1 距离单定点实验验证
实验1 测量装置的滚轮周长为300 mm,距离编码器的分辨率为360 p/r,即每旋转1圈可以产生360个脉冲。设置4组实验,测量系统分别行驶300 mm,600 mm,900 mm,1 200 mm 4种距离,每组实验做3次取误差最小组记录,距离测量的单定点测量准确率可以达到99.92%;距离测量完全可以达到测量需求

表4 距离测量理论与实际脉冲数对比

图8 1 200 mm程序测量时截图
3.2 角度单定点实验验证
实验2 测量装置的角度编码器分辨率为3 600 pN,即每转过一圈会产生3 600个脉冲,没转过1°,理论上将产生10个脉冲。将测量装置的前连接杆分别旋转±5°,±15°,每组实验做3次取误差最小组记录,角度测量的单定点的准确率可以达到99.67%,角度测量完全可以达到测量需求。
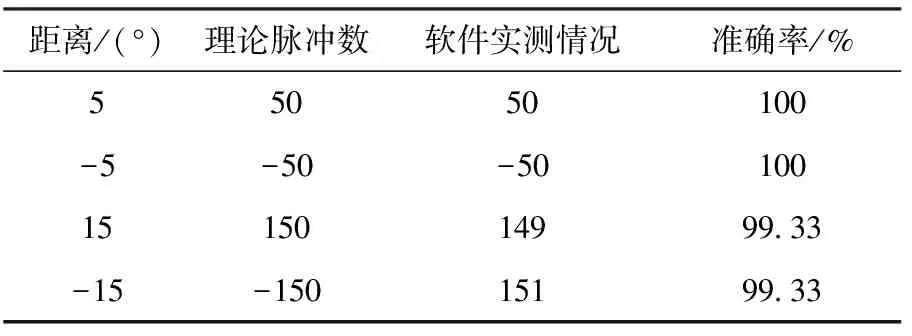
表5 角度测量理论与实际脉冲数对比

图9 15°程序测试时截图
3.3 路面单线测量实验及水准测量法验证
实验选取长度为10 m的水泥路面进行测量,路况良好,路面无明显损坏。测量装置的前后连接杆的初始夹角为0,测量装置所在的初始平面为基准面,该平面上测量系统的前进方向所在直线为基准线。实验中,为方便与水准测量法的测量结果进行比较,通过Matlab程序将曲线进行一次拟合,按照得出的一次曲线斜率进行旋转调整。
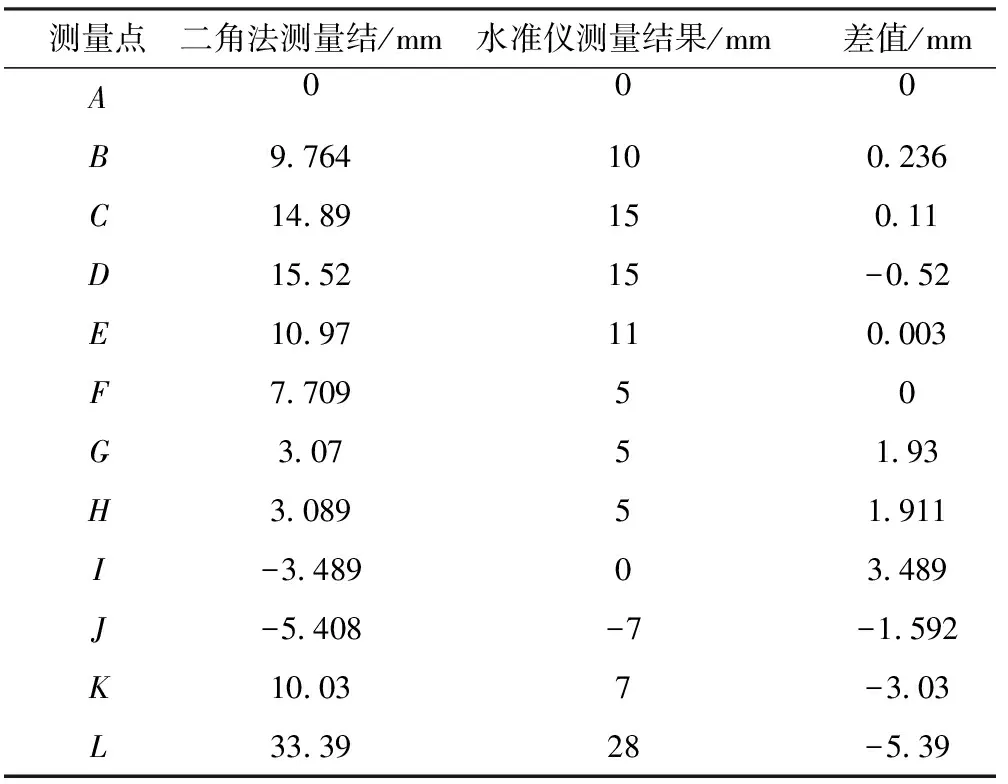
表6 二角法测量与水准仪测量结果对比
如图10所示,选取间隔为900 mm的B,C,D,E,F,G,H,I,J,K,L共11点,依次放置水准尺进行高程测量,得到以上11点的高程值。将二角法测量得到的值与之进行对比如表6所示。

图10 水泥路面断面形状测量曲线
观察图像和表中数据可发现,两种测量方法得到的数据偏差值最大值为5.39 mm,偏差值有随测量距离增加而增大的趋势。但在10 m范围内保持在±5.4 mm以内波动,表明该逐次二角法测量系统有较高的测量准确度。
4 结束语
(1)依照逐次二角法建立了路面测量系统的理论并设计完成了符合测量要求的铸铝车架,并选用了合适的编码器作为采集系统;
(2)完成了基于ARM的数据采集系统的建构,并通过Modbus通讯协议完成与计算机的交互,并为测量开发了基于Delphi的软件程序;
(3)实验结果表明定点测量离中准确率达99.92%,定点角度测量准确率达99.67%。在路面单线测量中与水准仪所测数据相比准确率可达92.7%,最大偏差<5.4 mm。
[1] 王建锋,宋宏勋,马荣贵.路面平整度评价指标 IRI 的影响因素[J].重庆交通大学学报:自然科学版,2012, 31(6):32-34.
[2] 王勇.提高沥青路面质量措施研究[J]. 内蒙古公路与运输,2014(1):27-29.
[3] 王锋,张金喜.沥青混凝土公路路面驾乘舒适性评价[J].北京工业大学学报,2014,40(3):378-383.
[4] Johannesson P,Podgórski K,Rychlik I. Modelling roughness of road profiles on parallel tracks using roughness indicators[J].IEEE Transactions on Circuit,2014(1):33-35.
[5] Wang G,Cai L,Shao B,et al. Comprehensive evaluation model of grey fixed weight clustering for airport pavement service performance[C].Beijing:International Conference on Transportation Engineering,2009.
[6] 赵康,丁磊,王金洋.双激光位移传感器测量路面平整度系统实现[J].汽车实用技术,2012(5):61-64.
[7] 何伟铭,封左伟.逐次二角在路面断面形状测量领域的运用[J].中国机械工程,2016(5):1767-1771.
[8] 吴静进,杨若波.ARM与DSP接口的通信设计[J].通信设计,2006(10):21-25.
[9] 余代俊.全站仪中间法代替二等水准测量的精度分析与实验[J].测绘与空间地理信息, 2006,29(5):117-120.
[10] Martins H F,Marques M B,Frazão O.Temperature-insensitive strain sensor based on four-wave mixing using Raman fiber Bragg grating laser sensor with cooperative Rayleigh scattering[J]. Applied Physics B,2011,104(4):957-960.
[11] 韦湘宜,丁红昌.光电编码器检测技术的研究现状及发展趋势[J].电子科技,2015,28(9):184-188.
[12] 钟阳,王哲人.对国际平整度指数法的评论[J].中国公路学报,1994,7(1):28-32.
[13] 张桂,金国强.基于ARM平台Modbus RTU协议的研发与实现[J].信息科技,2011(27):58-63.
[14] 武威,邢青敏.基于FPGA的增量式编码器接口电路设计在ARM上的运用[J].工程与实验,2012(3):48-54.
[15] 翁建年,张浩.基于嵌入式ARM的Modbus/TCP协议的研究与实现[J].计算机应用与软件,2009(10):53-59.
Pavement Surface Measurement System Based on Two Angles Method and ARM Chip
HE Weiming1,2,QIAN Cheng1,GAN Yi1
(1.School of Mechanical Engineering,University of Shanghai for Science and Technology,Shanghai 200093,China;2.Chou University,Tokyo 112-8551,Japan)
In order to detect the pavement elevation data in a more accurate and fast way, designing a new measurement system based on Two Angles method and ARM chip. The system collects traveling distance and angle change by rotary encoder, and through the ARM acquisition system acquisition and analysis data, through the Modbus communication protocol, the host computer information interaction, In actual measurement, the accuracy rate of the system is 99.92%, and the accuracy of the fixed point angle measurement is 99.67%. In the single line measurement of pavement and the level of the measured data compared to the accuracy rate of up to 92.7%, the maximum deviation is less than 5.4 mm
road roughness;successive two angle method;ARM chip;programmable digital filter; Modbus communication protocol
2016- 11- 22
国家自然科学基金(51375314)
何伟铭(1962-),男,副教授。研究方向:高精密加工与测量。钱程(1991-),男,硕士研究生。研究方向:高精密加工与测量。甘屹(1974-), 男,副教授。研究方向:先进制造技术等。
10.16180/j.cnki.issn1007-7820.2017.09.011
TN713+.7;TB22
A
1007-7820(2017)09-037-05
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
有色金属设计(2022年4期)2022-02-04
计算机应用(2020年5期)2020-06-07
疯狂英语·新悦读(2019年11期)2019-12-18
电子技术与软件工程(2018年1期)2018-03-22
制造技术与机床(2017年7期)2018-01-19
西安工程大学学报(2016年6期)2017-01-15
探测与控制学报(2015年4期)2015-12-15
专用汽车(2015年4期)2015-03-01
浙江大学学报(工学版)(2015年1期)2015-03-01
