
雷达主机与雷达伺服通信接口设计
2017-09-19 07:27蔡祥宝
计算机技术与发展 2017年9期
宋 玲,蔡祥宝
(南京邮电大学 电子科学与工程学院,江苏 南京 210003)
雷达主机与雷达伺服通信接口设计
宋 玲,蔡祥宝
(南京邮电大学 电子科学与工程学院,江苏 南京 210003)
伺服控制系统是雷达系统的核心部件,具有随动性,而在恶劣环境下,伺服控制系统的通信难度显著提高,使得其设计复杂度及实现难度也相应增加,因此设计一种简单稳定且可靠性高的雷达主机与雷达伺服的通信接口就显得尤为重要。通信接口主要由相应的软硬件及通信协议组成,其通信协议采用雷达主机与雷达伺服间的控制报文和回复报文来实现,运用TI公司生产的专用控制芯片TMS320F28335充当控制器,通过串行通信方式来实现数据传输。利用C语言在Code Composer Studio(CCS)3.3平台上编写相应的程序代码进而实现了通信接口的逻辑控制与通信。该通信接口的设计对进一步提高伺服控制系统的稳定性、可靠性具有重要作用,同时也在一定程度上降低了生产成本。
雷达伺服;雷达主机;RS-422;通信协议
0 引 言
雷达伺服系统是对作战目标进行雷达侦察的核心设备,主要功能是驱动雷达以各种速度进行水平扇扫,并对雷达的俯仰角度进行调整,将发现目标(含方位角度)传至雷达数据处理软件,实现俯仰方向的雷达侦察设备姿态调整及方位目标搜索扇扫。而雷达主机作为雷达伺服系统的关键设备,需要一个简单稳定且可靠性高的通信接口来实现信息的相互传递,进而实现对雷达天线在水平和俯仰方向的有效转动[1-4]。
通信接口作为伺服系统的关键组成部分,负责与其他设备的数据传递,对使用环境的要求更为严格,因此,一个稳定可靠且成本低的通信接口的设计对雷达伺服系统显得尤为重要。为此,提出了一种简单稳定且可靠性高的通信接口设计方案,以满足系统在恶劣环境下的通信要求。该方案对雷达伺服与雷达主机的通信协议进行了设计,使协议既简单又方便解析,并将其设定为雷达主机对雷达伺服的控制报文以及雷达伺服收到雷达主机的控制命令后的回复报文,充分利用TI公司生产的专用控制芯片TMS320F28335自带的串行口SCI,经MAX3490ESA电平转换后,将TTL电平转换成RS-422电平信号,从而实现了雷达主机与雷达伺服的硬件通信;采用模块化的设计方法对软件进行设计,并用C语言在Code Composer Studio(CCS)3.3软件开发平台上进行代码编写。实验结果表明,该方案具备简单、稳定性高、可靠性高、成本低等特点[5-6]。
1 雷达主机与雷达伺服之间的协议设计
雷达主机通过RS-422接口以不小于20 ms的时间间隔向雷达伺服发送控制命令,包括扫描方式、扇扫速度以及扇扫范围等。雷达伺服接收到雷达主机的命令后,开始执行命令,待再收到方位码读取脉冲后立即依次回复数据帧1(命令反馈)和数据帧2(码盘值反馈)。为了使数据分析更加清晰,将协议设定为两个方向:一是雷达主机发送给雷达伺服的控制报文;二是雷达伺服回复给雷达主机的回复报文。
1.1雷达主机发送给雷达伺服的控制报文
雷达主机发送给雷达伺服的控制帧包括帧头识别码、方位扫描方式、方位扇扫速度、方位扇扫范围、方位中心、俯仰中心以及校验码等8个字节。其中,帧头识别码的作用是为了区分数据帧,防止粘包,占一个字节;方位扫描方式是雷达伺服将要完成的动作类型,如扇扫、周扫、定点以及复位等动作,协议中采用半个字节;为了满足雷达伺服的速度要求,该协议将扇扫速度设定为几个固定的速度档,分别为1°/s、2°/s、5°/s、10°/s、12°/s,并将其设定为半个字节,与方位扫描方式整合到一个字节中;协议中将扇扫范围定义为一个字节,用于表示扇扫动作时扇扫边界离扇扫中心的远近距离;方位中心及俯仰中心分别采用两个字节表示,其中高字节在前,低字节在后;最后一个字节采用模二码进行校验。具体控制报文格式如表1所示。
1.2雷达伺服对雷达主机控制报文的回复
为了解析出高精度的目标位置,雷达主机需要准确及时地获取雷达伺服当前的俯仰角及方位角信息,因此,该协议规定,雷达伺服接收到雷达主机的命令后,开始执行命令,待再收到方位码读取脉冲后立即依次回复数据1(命令反馈)和数据2(码盘值反馈)。数据内容格式如表2和表3所示。
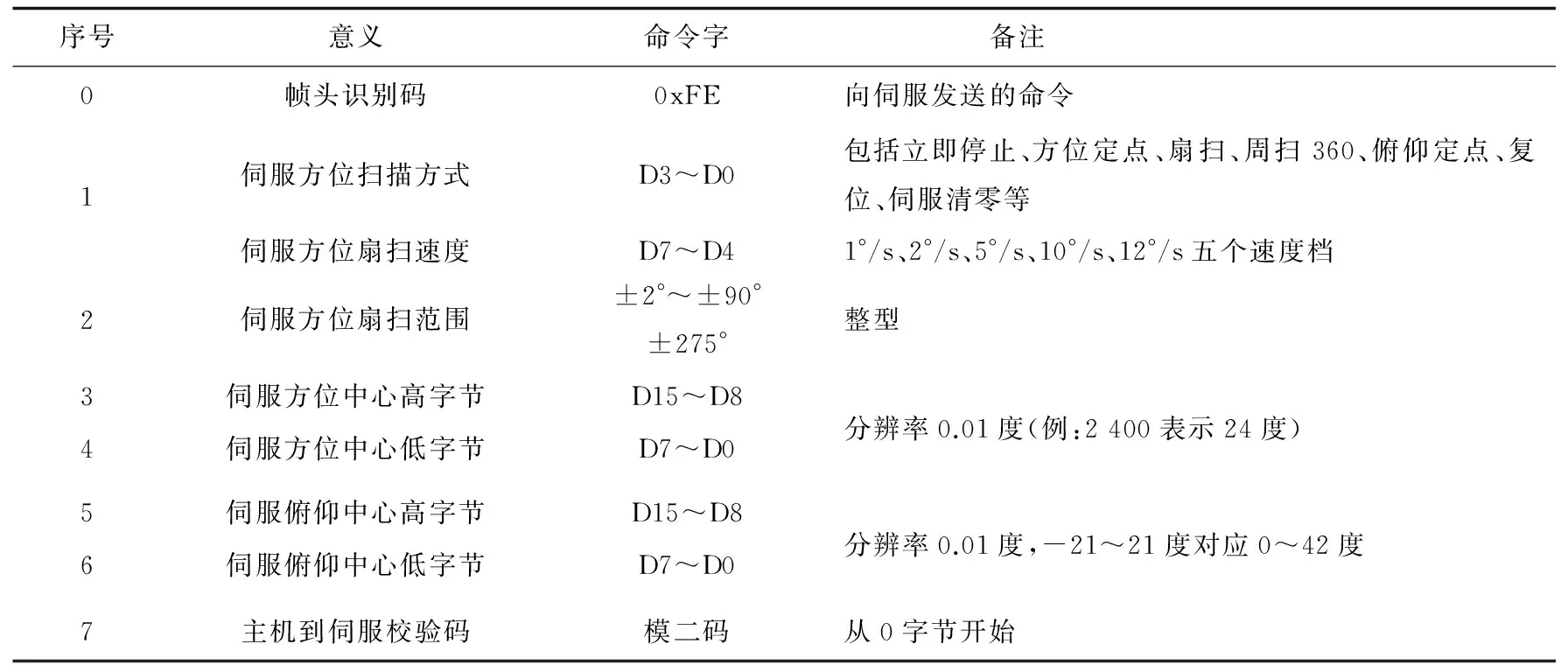
表1 雷达主机发送给雷达伺服的数据格式

表2 雷达伺服回复雷达主机的数据1格式
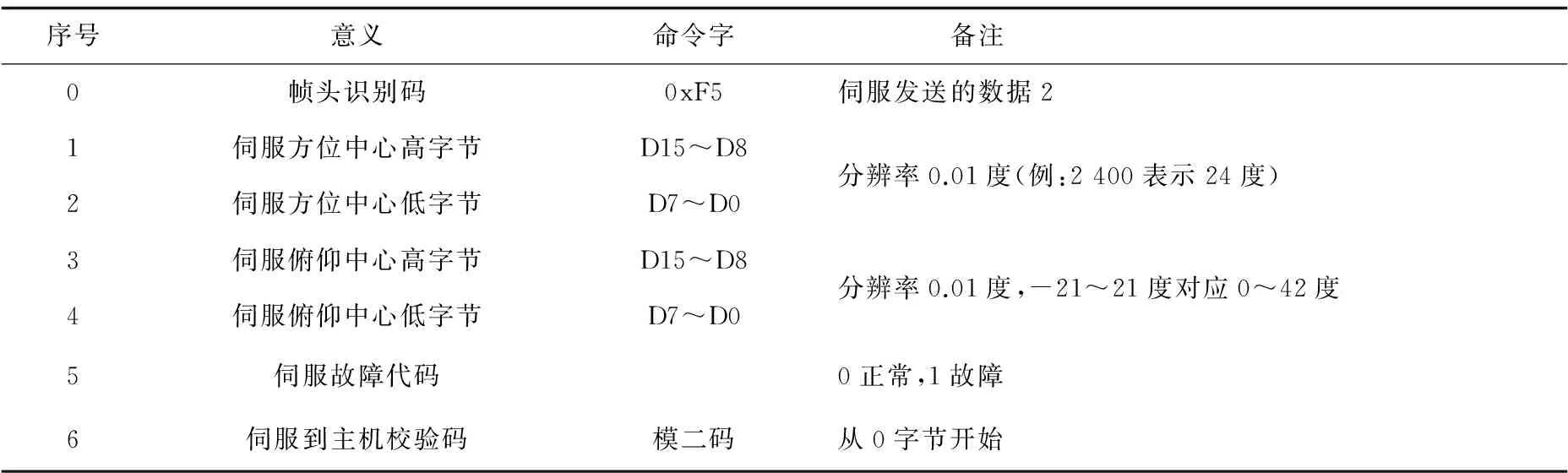
表3 雷达伺服回复雷达主机的数据2格式
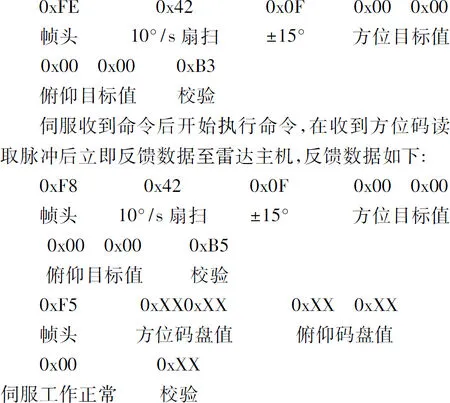
例如,上位机设置指令“方位扇扫,以0°为中心,±15°的扇扫范围,10°/s”,发送至雷达主机,雷达主机在每个CPI内通过RS-422发至雷达伺服,发送内容如下:
2 硬件电路设计
2.1通信接口选型
作为雷达伺服系统重要服务对象的雷达主机,对通信设计的可靠性要求较高,雷达伺服系统的通信方式根据雷达主机的不同需求而变化。雷达伺服系统常用的串口通讯方式为RS-232或者RS-485/422,由于RS-232接口标准出现较早,难免有不足之处,主要有以下四点[7-9]:
(1)接口的信号电平值较高,易损坏接口电路的芯片,且不兼容TTL电平;
(2)传输速率较低,在异步传输时,波特率为20 kbps;
(3)接口使用共地的传输形式,易产生共模干扰,使得抗噪声干扰性能弱;
(4)传输距离有限,最大传输距离仅为50英尺。
因此,不选用RS-232作为通信接口。
RS-422是在RS-232的基础上演变而来的,其在传输距离及传输速率方面都较RS-232有了极大提高,并且,其接口采用平衡驱动器及拆分接收器组合的方式,使得抗干扰性能有了极大提升。其电气特性:以两线间的电压差为+(2~6)V表示逻辑“1”;以两线间的电压差为-(2~6)V表示逻辑“0”。较RS-232的接口信号电平降低了,因此接口电路的芯片不易损坏,且该电平与TTL电平兼容。
而RS-485又是在RS-422的基础上发展而来的,因此,RS-485与RS-422的许多电气特性相仿;不同的是,RS-485采用半双工的工作方式,而RS-422采用全双工的工作方式。考虑到两者数据传输的要求及使用环境等,该系统选择RS-422进行连接[10-12]。
2.2设计原理
该系统利用TI公司生产的专用控制芯片TMS320F28335自带的串行口SCI,经MAX3490ESA电平转换后,将TTL电平转换成RS-422电平信号,即可实现雷达主机与雷达伺服之间的硬件通信。雷达主机和雷达伺服之间的通信电路框图如图1所示。
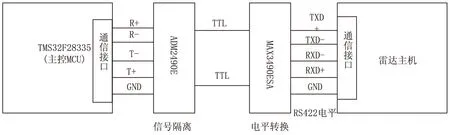
图1 RS-422通信电路框图
从图1可以看出,为了提高系统的抗干扰能力,降低外部信号对主控MCU的干扰,在该系统中,将ADM2490E连接在主控芯片串行口的RX、TX引脚与RS收发器MAX3490ESA之间,从而实现信号的隔离。ADM2490E是一款隔离数据收发器,针对平衡传输线路而设计,并且采用全双工通信方式,而RS-422接口也采用平衡驱动器,全双工通信方式,这样使得该芯片更好地兼容通信电路。MAX3490ESA芯片的作用是实现电平转换,即将TTL电平转换成RS-422所需的差动电平,由于MAX3490ESA芯片是全双工设计,所以在该系统中只需要接一个这样的芯片即可实现接收和发送,不仅简化了系统的电路设计,而且降低了设计成本。同时,隔离芯片的加入也增强了系统的抗干扰能力,从而提升了系统的稳定性及可靠性[13-14]。
3 软件设计
系统软件是利用C语言在CCS3.3平台上编写,为了方便系统调试,采用模块化的设计方法。在系统软件中,将RS-422接口参数设置为:全双工串行异步通信,波特率115 200 bps,8 bit数据位,1 bit停止位,无奇偶校验位。具体流程图如图2所示。
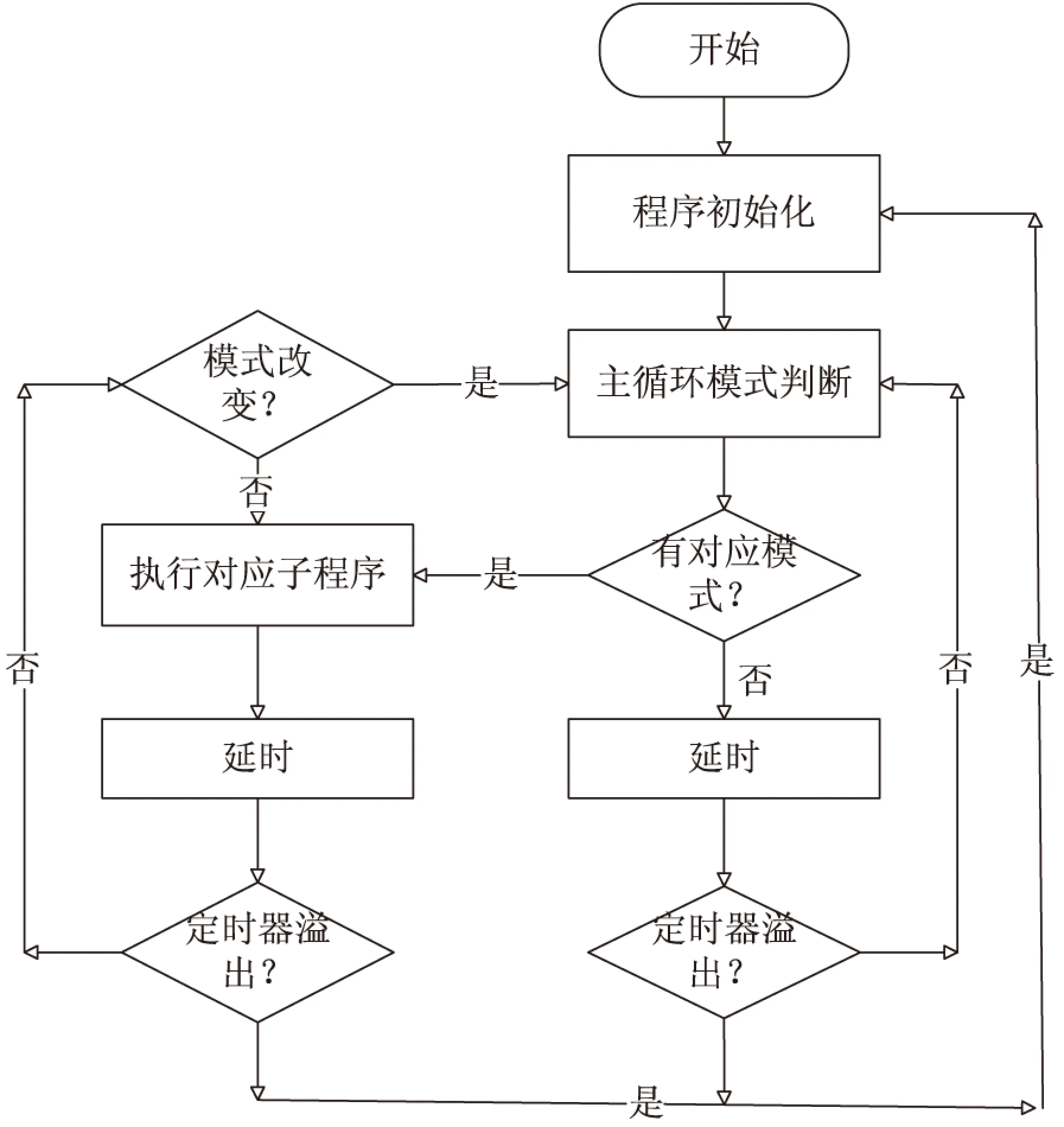
图2 软件流程图
其工作流程为:先对TMS320F28335进行程序初始化,然后对主循环模式进行判断,如果有对应模式,则程序开始执行对应的子程序,如果没有对应模式,则执行相应的延时程序。在此期间,主循环模式不断地判断有没有模式改变,若有,则执行改变后的模式子程序;若没有,则接着执行原来的模式子程序。
4 结束语
为实现雷达主机与雷达伺服系统之间简单稳定且高效可靠的通信,提出了一种通信接口设计方案。该方案基于雷达伺服与雷达主机的通信协议以及通信接口的软硬件设计原理,基于CCS3.3软件开发平台采用C语言进行了代码编写,设计了简单可靠且容易解析的通信协议,在硬件设计中,选择了全双工通信方式的RS-422通信接口,电平转换芯片也选择了全双工工作方式的MAX3490ESA芯片,将TTL电平转换成RS-422所需的差动电平。该芯片实现了数据的接收和发送,简化了系统电路设计,降低了成本。同时,全双工隔离芯片ADM2490E的采用也使得接口的抗干扰能力增强,提升了伺服系统的稳定性及可靠性。
[1] 吴乾坤.单芯片交流伺服控制系统若干问题的研究[D].哈尔滨:哈尔滨理工大学,2004.
[2] 马成才.基于CANopen协议的交流伺服驱动器从站研究[D].南京:南京航空航天大学,2012.
[3] Singh B N,Singh B,Singh B P.Fuzzy control of integrated current-controlledconverter-inverter-fed cage induction motor drive[J].IEEE Transactions on Industry Applications,1999,35(2):405-412.
[4] Saleh K I,Badr M A,Etwer A S,et al.Analysis of controlled permanent magnet synchronous motor using artificial neural network[C]//International conference on electrical machines & systems.[s.l.]:[s.n.],2001:791-795.
[5] 李 杰.一种新型车载桅杆式雷达伺服系统的设计[D].南京:南京信息工程大学,2012.
[6] 李红卫,刘 昊,李勇臻.基于TMS320F28335的雷达伺服系统的设计与实现[J].电子设计工程.2013,21(1):170-172.
[7] Zhang Dongliang,Ai Xing,Xu Chunjun,et al.DSP-based software AC servo systems with PM synchronous motors[C]//International conference on electrical machines & systems.[s.l.]:[s.n.],2001:755-758.
[8] 牛思先,向 征.基于RS-422/485的串行异步通讯接口设计和应用[J].计算机工程与设计,2007,28(10):2472-2474.
[9] 林 颖,罗金炎,刘 骄,等.基于RS485总线的PC机与多单片机系统的串行通信[J].机械与电子,2006(1):33-36.
[10] 杨淑珍,徐文尚,解金旺,等.基于RS485总线的多台变频器远程监控系统的实现[J].电气应用,2005,24(12):91-93.
[11] Nick S.Practical field bus[J].Control and Instrumentation,1998,30(1):45-47.
[12] 吴 强,周小芳.RS-485网络通信的无极性接线设计[J].电子工程师,2005,31(12):55-56.
[13] 张 亮.基于串行总线的数控系统通信协议[J].兵工自动化,2005,24(2):27-28.
[14] Antsaklis P,Baillieul J.Special issue on technology of networked control systems[J].Proceedings of the IEEE,2007,95(1):5-8.
Design of Communication Interface between RadarCenter and Radar Servo
SONG Ling,CAI Xiang-bao
(College of Electronic Science and Engineering,Nanjing University of Posts and Telecommunications,Nanjing 210003,China)
Servo control is the core component of the radar system which has the following characteristics.In harsh environment,the difficulty of communication of the servo control system is improved significantly,which makes its design complexity and realization difficulty increased.Thus it is particularly important to design a simple,stable and highly reliable communication interface between radar center and radar servo system.It consists of hardware and software and corresponding communication protocol which relies on controlling and replying messages between radar center and radar servo to achieve and uses special control chip named TMS320F28335 produced by the company TI to act as controllers,which transmits data through serial communication mode.By using C language on the CCS3.3 platform to write the matching program code,it can realize the logic control and the transmitting of the interface.The design of the communication interface plays an important role in improving its stability and reliability,and to some extent can reduce the cost of the production.
radar servo;radar center;RS-422;communication protocol
2016-05-27
:2016-09-08 < class="emphasis_bold">网络出版时间
时间:2017-07-11
国家自然科学基金资助项目(11304159);教育部博士点基金项目(20133223120006)
宋 玲(1990-),女,硕士研究生,研究方向为光子学与光电技术;蔡祥宝,研究生导师,教授,研究方向为光电功能材料在光通信中的应用,光纤的损耗、色散、非线性等光学性能的研究,新型光子器件在光通信中的应用。
http://kns.cnki.net/kcms/detail/61.1450.TP.20170711.1452.016.html
TP31
:A
:1673-629X(2017)09-0197-04
10.3969/j.issn.1673-629X.2017.09.043
猜你喜欢
建材发展导向(2022年18期)2022-09-22
北京航空航天大学学报(2022年6期)2022-07-02
湖南大学学报·自然科学版(2021年6期)2021-08-02
航天工业管理(2020年9期)2020-12-28
汽车文摘(2017年9期)2017-12-06
大经贸(2017年8期)2017-09-26
专用车与零部件(2016年1期)2016-12-10
中兴通讯技术(2016年3期)2016-06-22
现代电子技术(2014年7期)2014-04-18
现代电子技术(2009年15期)2009-09-30
