基于安排过渡过程的新型双向DC-DC变换器PID控制
2017-09-18 00:26戴德嵩
电力科学与工程 2017年8期
韦 星, 戴德嵩
(东南大学 电气工程学院,江苏 南京 210096)
基于安排过渡过程的新型双向DC-DC变换器PID控制
韦 星, 戴德嵩
(东南大学 电气工程学院,江苏 南京 210096)
双向DC-DC变换器被广泛应用在电动(混合动力)汽车、不间断电源系统、新能源(太阳能、燃料电池等)发电系统、电子负载等领域。传统双向DC-DC变换器采用PID 控制,但常因初始时间内控制力过大而出现超调现象。针对储能系统鲁棒性及稳定性设计一种基于安排过渡过程的新型双向DC-DC变换器控制方式。在利用辨识法获得变换器二阶线性模型后,使用PID控制器和安排过渡过程的PID控制器对双向DC-DC变换器进行电压电流控制的仿真和实验。实验结果表明,安排过渡过程可在变换器初始运行阶段消除输出超调量,一定程度上减缓系统超调量与调节时间之间的矛盾。
安排过渡过程; 双向DC-DC变换器; 超调量; 调节时间
0 引言
随着社会的不断发展和进步,日常的生产及生活对电力电子变换器的需求逐渐增加,越来越多的场合需要一套甚至多套电力电子变换器才能够满足需求。双向DC-DC变换器由于可以实现能量的双向流动,完成以前需要2套传统的单向功率流的变换器才能实现的功能,受到了广泛应用。双向DC-DC变换器的应用可有效减少功率器件和磁性元件的数量,提高功率密度,降低生产成本。此外,相比于2套单向功率流变换器,双向DC-DC变换器可实现更快的动态性能。目前,双向DC-DC变换器已被广泛地应用在电动汽车、不间断电源系统、新能源发电系统以及电子负[1-5]等领域。
作为储能系统的核心,双向DC-DC变换器为系统的安全运行提供保障,其控制方式在电能储存过程中起到极其重要的作用。双向DC-DC变换器常用控制方式为双闭环PID控制,该控制方式往往导致控制器鲁棒性较弱,储能系统超调量与调节时间之间存在矛盾。本文针对双向DC-DC变换器鲁棒性及稳定性,对其控制方式进行优化设计,采用基于安排过渡过程的新型双闭环PID控制,将调节时间作为控制目标,使储能系统在初始运行阶段消除输出超调量,实现系统无超调快速达到稳定状态。
1 双向DC-DC变换器
双向DC-DC变换器是直流变换器的双象限运行,可实现能量的双向传输,在功能上相当于2个单向直流变换器[6-7]。本设计所采用的双向DC-DC变换电路原理图如图1所示。

图1 双向DC-DC变换器原理图
本设计双向DC-DC变换器分为充电和放电2种工作模式。当变换器工作于充电模式时,MOS管Q2关断,双向DC-DC变换电路等效为BUCK降压电路,此时u2作为输入电压,u1为输出电压,u2电压恒定。MOS管Q1栅极在PWM波的控制下进行周期性的通断。在Q1开通期间,输入电压经过Q2直接输出,此时二极管D2承受反压而截止,输出电流流入电感L,电感电流上升,能量储存于电感中,同时对电池充电;当Q1关断期间,负载与输入电压脱离,由于电感电流不能瞬间降低为0,所以通过二极管D2进行续流,电感电流按线性规律下降,电感对电池释放能量。变换器在充电模式下,首先进入恒流充电模式,用户可步进设定电池充电电流,受到双向DC-DC变换电路输入电压的波动以及负载的影响,电池充电电流会产生波动,为了在此阶段保持充电电流恒定,单片机通过改变PWM波的占空比调节双向DC-DC变换电路的输出电压,稳定输出电流。当电池电压升高至电池额定电压时,变换器自动进入恒压充电模式,控制方法与恒流模式相同,控制目标转换为电压,保持u1电压恒定,降低充电电流。
当变换器工作于放电模式时,MOS管Q1关断,锂电池作为电源向负载供电,双向DC-DC变换电路等效为BOOST升压电路,此时u1为输入电压,u2为输出电压,u1电压恒定,输出电压可调。MOS管Q2栅极在PWM波控制下进行周期性通断。当Q2开通时,D1反向偏置关断,电源电压经Q2向电感L供电使其储能,电感电流按线性规律上升,同时电容C1上的电压向负载供电,电容电压减小。当Q2关断时D3导通,锂电池和电感共同向电容充电,并向负载提供能量。
双向DC-DC变换器控制框图如图2所示,图中Udc为双向DC-DC变换器输出电压,Id为锂电池充放电电流。由于双向DC-DC变换器在不同工作状态下的控制对象不同,采用双闭环控制策略,外环控制输出电压,内环控制充放电电流,如图虚框1、2所示。虚框3为双向DC-DC变换器输出方向选择项。

图2 双向DC-DC变换器控制框图
本设计采用系统辨识非参数建模法描述双向DC-DC变换器动态特性。由于变换器不论工作于任何模式下,其用于储能的非线性元件均为电感L及电容C1,所以可将变换器在某激励条件下的阶跃响应特性曲线近似等效为线性二阶模型,同时为简化系统辨识过程,将系统作归一化处理,得系统模型传递函数:
(1)
式中:K为系统增益;ζ为系统阻尼系数;ωn为系统自然频率;τ为系统延时。
双向DC-DC变换器零状态单位阶跃响应曲线如图3所示。
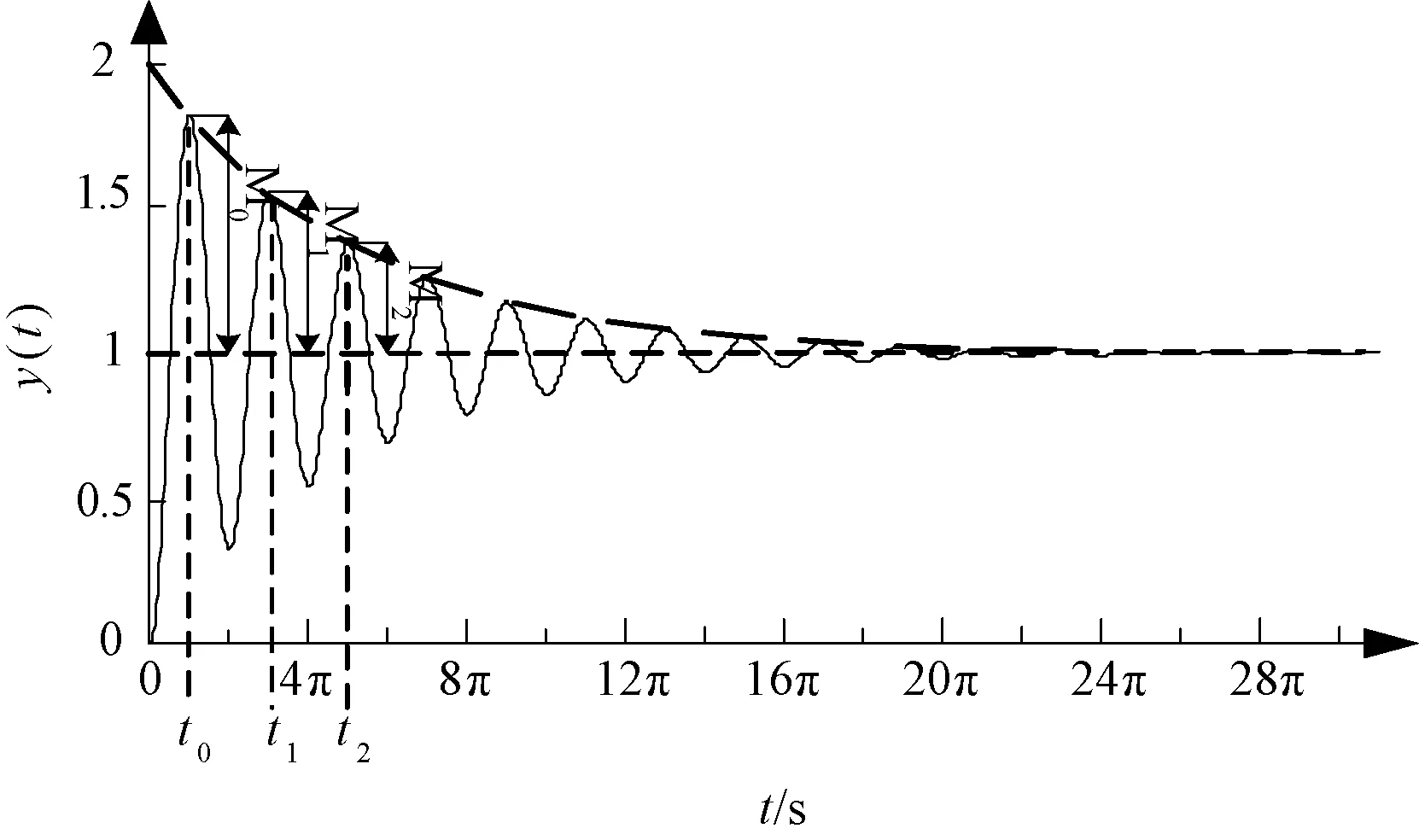
图3 双向DC-DC变换器零状态单位阶跃响应
结合图3,根据二阶常系数微分方程特性,可得需要辨识系统参数,即自然频率ωn与系统阻尼系数ζ:
(2)
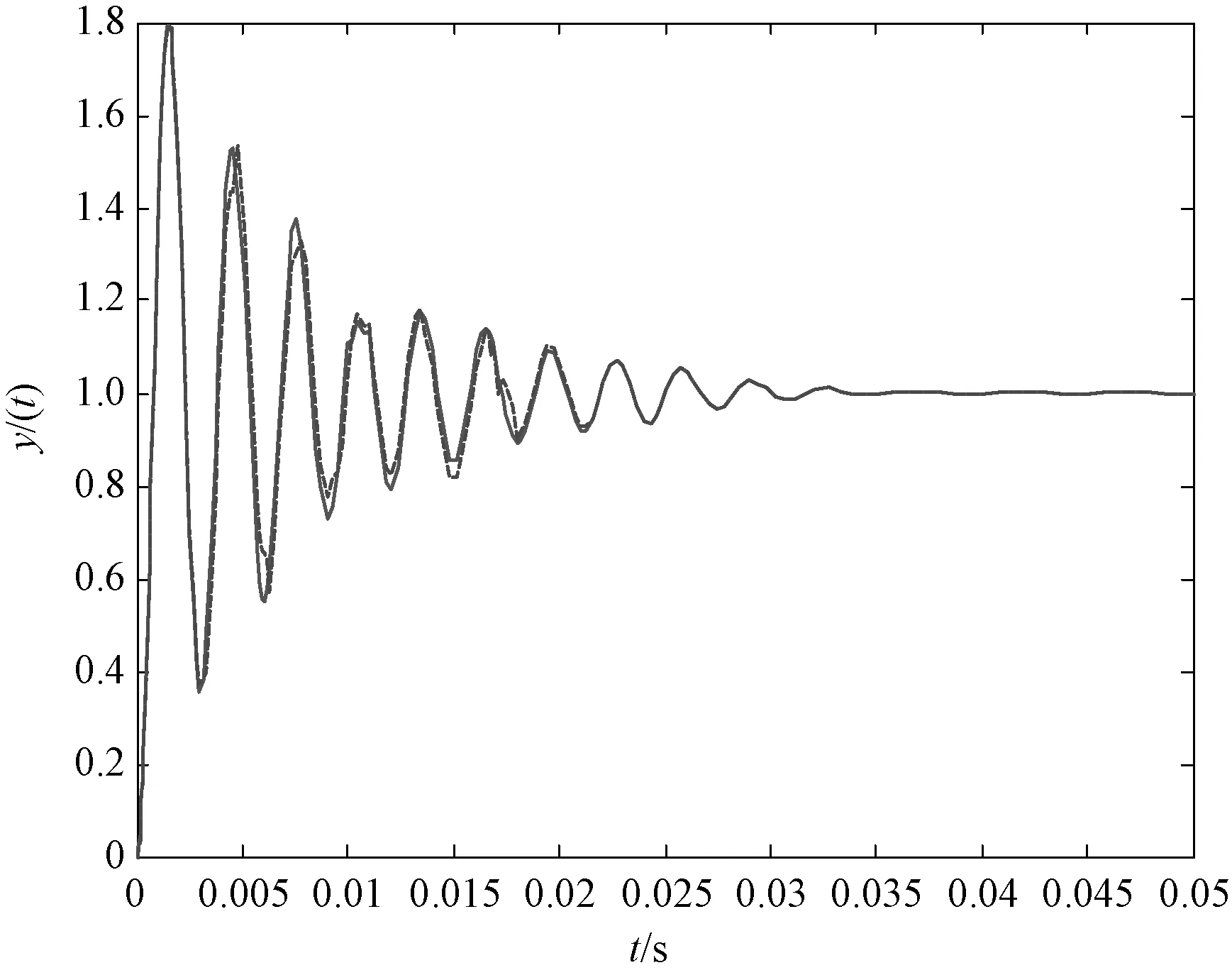
图4 增益归一化后阶跃响应实测波形与仿真结果
利用搭建好的双向DC-DC变换器驱动控制平台,测得双向DC-DC变换器动态响应曲线,增益归一化后如图3中虚线所示,双向DC-DC变换器在约35 ms时趋于稳定。从图中可得前两次的超调量M0、M1以及分别对应的时间t0、t1,求得在该激励条件下的系统特征参数ωn及ζ。通过MATLAB/SIMULINK对双向DC-DC变换器传递函数进行仿真,仿真曲线如图4中实线所示,通过比较可以看出系统辨识近似度较高,拟合效果好,可满足绝大多数应用场合。
2 基于PID算法的双向DC-DC变换器控制
现阶段双向DC-DC变换器控制算法主要有PID算法、自适应算法、模糊控制算法和变参数控制算法等,这些算法针对不同的工程应用,可使双向DC-DC变换器在某一方面达到较好的控制效果,但目前仍没有算法能够彻底解决双向DC-DC变换器非线性、时变性和超调量大等问题。本设计采用PID算法实现在锂电池充放电过程中对双向DC-DC变换器输出电压及输出电流的实时控制。变换器PID控制系统结构框图如图5所示。

图5 PID控制系统结构框图
根据双向DC-DC变换器的二阶线性模型传递函数,利用MATLAB/SIMULINK建立双向DC-DC变换器单位阶跃响应PID控制器模型,如图6所示。
从2个方面出发选取PID参数:①提高系统响应速度,缩短调节时间,但不可避免地增大超调量;②降低系统超调量,但会导致系统调节时间增加。
根据实际需要,以上述2方面为目标选取满足控制要求的PID参数对双向DC-DC变换器模型进行单位阶跃响应仿真,如图7所示。在图7(a)中,系统初始超调量较大,但在10 ms时已趋于稳定状态,过渡时间短。而在图7(b)中,系统超调量虽有了明显降低,但在40 ms时系统才进入稳定状态,调节时间较长,响应速度过慢。

图7 双向DC-DC变换器单位阶跃响应PID控制仿真结果
3 安排过渡过程提高双向DC-DC变换器控制性能
3.1PID控制器的不足与安排过渡过程
经典PID控制器从表现形式上来看是根据系统误差的过去、现在和将来的变化趋势构造控制量。但在大多数工程控制中,PID 控制常常存在于初始时间内因控制力太大而出现超调的现象。同时,PID控制器参数需要根据系统特性进行选择与整定,同一组PID控制参数所能适用的控制对象过窄,鲁棒性较弱[8]。
在实际生产过程中,超调是动态准确性的一个衡量标准,控制策略的目的是实现系统快速而又无超调地跟踪目标信号。安排过渡过程是在被控量的起始状态与最终目标状态之间,根据系统承受能力,使被控量按时间逐步达到最终目标状态的设计工作。通过安排过渡过程,期望系统的控制量跟随逐步变化的目标进行变化,实现快速且无超调地达到最终状态。安排过渡过程要考虑系统的约束条件,例如被控对象反应速度、系统的测控速度、控制力大小等,同时还要适应对象系统的阶次。从控制结果上看,如果安排过渡过程成功,系统实际的过渡过程在理论上基本不受控制器和被控对象模型的影响,控制器鲁棒性增强,参数适应性提高[9]。图8所示为安排过渡过程的PID控制系统框图。

图8 安排过渡过程的PID控制系统框图
3.2安排过渡过程对PID控制量的影响
对PID控制器差分方程中的微分项及积分项采用后向差分近似法,差分方程可表示为:
(3)
式中:U(k)为PID控制器k时刻输出;e为被控量目标值减去实际值的差值;T为控制周期;Up(k)为与当前差值成比例的比例控制量;Ui(k)为与差值累积成比例的积分控制量;Ud(k)为与差值变化率成比例的微分控制量。
(1)安排过渡过程对偏差比例控制的影响
(4)
式中:S(k)为逐步接近最终目标值SO的一系列过渡目标值。
通常,过渡目标值与实际值的差值S(k)-R(k)要比最终目标值与实际值的差值SO-R(k)小很多,因此需要较大的比例控制系数获得足够的控制量。当被控量低于过渡目标值时,Up(k)表现为正向激励;当被控量高于过渡目标值时,Up(k)表现为负向激励。Up(k)能够实现被控量对过渡过程中各个目标值的跟踪变化。在不安排过渡过程的情况下,被控量始终与最终目标值比较,Up(k)切换不及时,安排过渡过程能够提高Up(k)正负控制切换的及时性。
(2)安排过渡过程对偏差积分控制的影响
(5)
式中:ε为积分分离门限;k为控制周期。
若系统未安排过渡过程,被控量始终与最终目标值相比较,积分控制只在被控量与最终目标差值小于积分分离门限时产生抑制作用,控制作用不明显。安排过渡过程后,被控量在每一个控制周期内与过渡目标值相比较,偏差小于积分分离门限时积分控制产生作用,当积分参数设计合理,积分控制可在整个控制过程中起到积极效应。安排过渡过程的系统,其积分分离门限与积分系数可参照系统允许稳态误差进行适当减小。
(3)安排过渡过程对偏差微分控制的影响
(6)
微分控制通常用于抑制过程变化的趋势,当没有安排过渡过程时,Ud(k)与R(k)的变化趋势相反:
(7)
安排过渡过程后,式(7)可改写为:

(8)
由式(8)可以看出,系统偏差量由2部分组成:一部分为实际被控量的增量ΔR,另一部分为过渡目标的增量ΔS。当增量ΔR与增量ΔS相等时,说明被控量的变化等于安排目标的变化,此时微分控制为0;当ΔR大于ΔS时,说明被控量的变化大于安排目标的变化,此时微分控制表现为反向抑制作用;当ΔS大于ΔR时,微分控制则表现为正向推进作用。可见在安排过渡过程后,微分控制变得更为精细,不再是简单的抑制过程的变化,而是既能使被控量接近目标值,又能使被控量远离目标值。
从上述安排过渡过程对控制量的影响可以看出,安排过渡过程后,变换器系统PID参数的选定范围得到扩大。比例系数可选择临界震荡系数,积分系数与微分系数可由系统的允许稳态误差及控制周期确定,与实验法、经验法相比,安排过渡过程后系统PID参数的选取变得更为简单快捷[10-11]。
3.3安排过渡过程效果
针对双向DC-DC变换器二阶线性模型传递函数,设计过渡过程加速度函数V2(t):
(9)
式中:VO为设定值;T表示过渡过程时间。
速度函数V1(t)为加速度函数在时间t内的积分:
(10)
最终获得安排的过渡过程函数V(t):
(11)
一般地,加速度函数V2(t)可按照如下规则选取:在区间(0,T)的前一部分取正,后一部分取负,保证正负面积相等。由于V1(t)在(0,T)上为正,因此安排的过渡过程V(t)为从零开始单调递增至VO的函数。
根据双向DC-DC变换器的驱动时间及系统所能承受快慢的能力选取过渡时间T,VO设为单位阶跃函数。利用MATLAB/SIMULINK建立安排过渡过程的双向DC-DC变换器PID控制器模型的单位阶跃响应,如图9所示,MATLAB FUN中即为安排的过渡过程,其输入为系统仿真时间,输出值与单位阶跃函数的乘积为不断接近最终目标的过渡目标值。在同一PID参数控制下,系统仿真曲线如图10所示,图10(a)与图7(a)为一对比组,图10(b)与图7(b)为一对比组。通过图中对比可以看出,系统在安排过渡过程后,将调节时间作为控制标准,使被控量始终跟随逐步接近最终目标的过渡目标值,实现无超调地达到稳定状态。此时可选取较大的比例增益系数,提高系统响应速度,缓解超调量与调节时间之间的矛盾。

图9 安排过渡过程PID控制器仿真模型
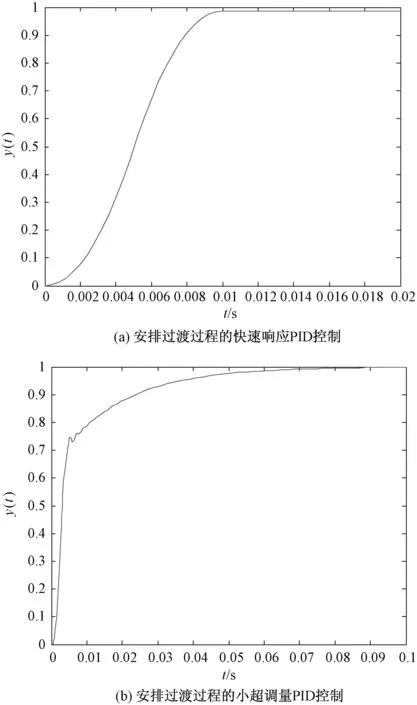
图10 安排过渡过程的单位阶跃响应效果
利用同样的方法选取过渡时间T,VO设为单位方波函数,通过MATLAB仿真验证安排过渡过程对于双向DC-DC变换器开断的优化效果。在同一PID控制参数下,图11(a)为没有安排过渡过程的仿真结果,变换器在开断过程中存在一定超调量,输出电流在切换过程中不稳定;图11(b)为在0 s、1 s、2 s 3个时间点上安排了过渡过程的仿真曲线,变换器输出在安排过渡时间内跟踪不断接近最终目标值的过渡目标值,在变换器开断时系统输出无超调,而在未安排过渡过程的其余时间系统仍存在超调现象。

图11 安排过渡过程的方波跟踪效果
在仿真的基础上,利用双向DC-DC变换器驱动平台,配合控制器及采样电路对变换器的电流控制进行实际测试。通过设置驱动PWM波的频率与占空比,确定变换器输出电流。实验方案为变换器输出电流由1 A向2 A的阶跃响应,实验结果如图12所示。由图中可以看出,实际系统在安排过渡过程时无法像仿真一样根本消除变换器输出电流振荡,但可在初始运行阶段消除输出电流超调量。
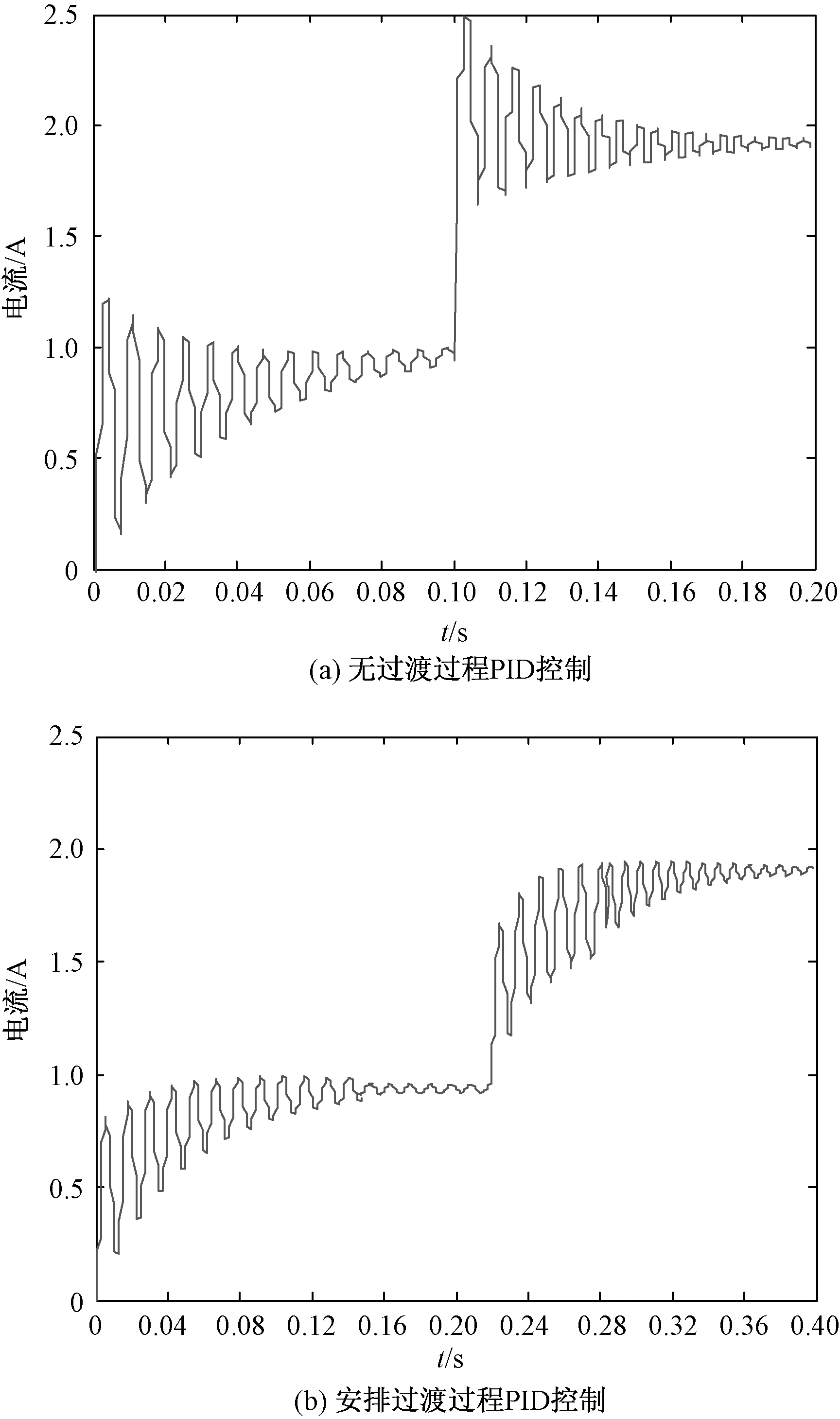
图12 目标2A输出电流阶跃响应
4 结论
双向DC-DC变换器作为实现高效储能的重要技术,其能够安全稳定高效地运行是当前各国需要解决的重大问题。本文针对储能系统的鲁棒性及稳定性提出一种新型控制方式,合理减缓系统超调量与调节时间之间的矛盾。在实际测试中,安排过渡过程虽可在系统初始运行阶段消除输出超调量,但无法根本杜绝变换器输出振荡,同时由于控制器在每一步过渡过程中都需重新计算过渡目标值,造成调节时间不可避免的延长,在对调节时间要求苛刻的情况下,系统超调量与过渡时间的矛盾仍然存在。
[1]房绪鹏, 李昊舒, 许玉林,等. 新型升-降压DC-DC变换器的研究[J]. 电力科学与工程, 2016, 32(12):38-42.
[2]雷志方, 汪飞, 高艳霞,等. 面向直流微网的双向DC-DC变换器研究现状和应用分析[J]. 电工技术学报, 2016, 31(22):137-147.
[3]宋丽, 赵兴勇. 基于变环宽控制的三相双向DC/DC变换器研究[J]. 电力科学与工程, 2014, 30(4):20-23.
[4]BEG O A, ABBAS H, JOHNSON T T, et al. Model validation of PWM DC-DC converters[J]. IEEE Transactions on Industrial Electronics, 2017, (99):1.
[5]ALGHASSI A, SOULATIANTORK P, SAMIE M, et al. Fault tolerance enhance DC-DC converter lifetime extension [J]. Procedia Cirp, 2017, 59(2):268-273.
[6]房绪鹏, 庄见伟, 李辉. 一种新型双向DC-DC变换器[J]. 工矿自动化, 2016, 42(9):52-56.
[7]温春雪, 臧振, 霍振国,等. 基于双向DC-DC变换器的锂电池组充电均衡策略[J]. 电源技术, 2016, 40(12):2424-2427.
[8]PATELLA B J, PRODIE A, ZIRGER A, et al. High-frequency digital PWM controller IC for DC-DC converters[J]. IEEE Transactions on Power Electronics, 2003, 18(1):438-446.
[9]黄焕袍, 万晖, 韩京清. 安排过渡过程是提高闭环系统“鲁棒性、适应性和稳定性”的一种有效方法[J]. 控制理论与应用, 2001, 18(s1):89-94.
[10]张勋, 王广柱, 商秀娟,等. 双向全桥DC-DC变换器回流功率优化的双重移相控制[J]. 中国电机工程学报, 2016, 36(4):1090-1097.
[11]张勋, 王广柱, 王婷. 双向全桥DC-DC变换器基于电感电流应力的双重移相优化控制[J]. 电工技术学报, 2016, 31(22):100-106.
New Type Bi-directional DC-DC Converter PID Control Based on Arranging Transient Process
WEI Xing, DAI Desong
(School of Electrical Engineering, Southeast University, Nanjing 210096,China)
Currently, bi-directional DC-DC converters have been widely used in electric (hybrid) vehicles, uninterruptible power systems, new energy (solar, fuel cell, etc.) power generation systems, electronic load and other fields. PID control is the most frequently used strategy in traditional two-way DC-DC converter, but due to too large the control force at initial time, overshoot phenomenon often appears. A new bidirectional DC-DC converter control method based on arrangement transition process is designed for better robustness and stability of energy storage System. After obtaining a second-order linear model of the converter by using the identification method, the PID controller and the PID controller with the transition process are used to carry out the simulation and experiment on the voltage and current control of the bidirectional DC-DC converter. The experimental results show that the transition process can eliminate the output overshoot in the initial operation phase of the converter, and reduce the contradiction between the system overshoot and adjustment time to some extent.
arranging the transient process; bidirectional DC-DC converter; overshoot; adjustment time
2017-05-11。
江苏省科技项目(BY205070-08)。
10.3969/j.ISSN.1672-0792.2017.08.002
TN710
:A
:1672-0792(2017)08-0006-07
韦星(1994-),男,硕士研究生,主要研究方向为电机与电器。
猜你喜欢
电子产品世界(2021年5期)2021-02-09
环球时报(2020-08-11)2020-08-11
机电工程技术(2018年10期)2018-12-06
天津教育·下(2018年9期)2018-07-13
浙江中西医结合杂志(2013年4期)2013-11-08
电力自动化设备(2013年11期)2013-09-18
电气电子教学学报(2012年1期)2012-10-12
探测与控制学报(2012年1期)2012-08-27
中共合肥市委党校学报(2012年2期)2012-08-15